Unit-3. Three Phase Induction Motor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Electrical Machines Lab Ii
Electrical & Electronics Engineering Department BRCM COLLEGE OF ENGINEERING & TECHNOLOGY BAHAL – 127028 ( Distt. Bhiwani ) Haryana, India ELECTRICAL MACHINES LAB II EE-327-F ELECTRICAL MACHINES-II LAB L T P CLASS WORK : 25 Marks 0 0 2 EXAM : 25 Marks TOTAL : 50 Marks DURATION OF EXAM : 3 HRS List of Experiments: 1. Study of the No Load and Block Rotor Test in a Three Phase Slip Ring Induction Motor & draw its circle diagram 2. To Study the Starting of Slip Ring Induction Motor by Rotor Resistance Starter. 3. To Study and Measure Direct and Quadrature Axis Reactance of a 3 phase alternator by Slip Test 4. To Study and Measure Positive, Negative and Zero Sequence Impedance of a Alternator 5. To Study and Measure Synchronous Impedance and Short circuit ratio of Synchronous Generator. 6. Study of Power (Load) sharing between two Three Phase alternators in parallel operation condition 7. Synchronization of two Three Phase Alternators, by a) Synchroscope Method b) Three dark lamp Method c) Two bright one dark lamp Method 8. To plot V- Curve of synchronous motor. 7. To study and verify Load characteristics of Long Shunt & short shunt Commutatively Compound Generator using 3 phase induction motor as prime mover. 10. To perform O.C. test on synchronous generator. And determine the full load regulation of a three phase synchronous generator by synchronous impedance method NOTE: At least 10 experiments are to be performed, with at least 7 from above list, remaining three may either be performed from above list or designed & set by concerned institution as per scope of syllabus. -
Modeling, Analogue and Tests of an Electric Machine
MODELING, ANALOGUE AND TESTS OF AN ELECTRIC MACHINE VOLTAGE CONTROL SYSTEM 'by GRAHAM E.' DAWSON ( j B.A.Sc, University of British. Columbia, 1963. A THESIS SUBMITTED IN PARTIAL FULFILMENT OF THE REQUIREMENTS, FOR THE DEGREE OF MASTER OF APPLIED SCIENCE. in the Department of Electrical Engineering We accept this thesis as conforming to the required standard Members of the Committee Head of the Department .»»«... Members of the Department of Electrical Engineering THE UNIVERSITY OF BRITISH COLUMBIA September, 1966 In presenting this thesis in partial fulfilment of the requirements for an advanced degree at the University of British Columbia, I agree that the Library shall make it freely.avai1able for reference and study. I further agree that permission for ex• tensive copying of this thesis for scholarly purposes may be granted by the Head of my Department or by his representatives.. It is understood that copying or publication of this thesis for finan• cial gain shall not be allowed without my.written permission. Department of Electrical Engineering The University of British Columbia Vancou ve r.,8, Canada Date 7. MM ABSTRACT This thesis is concerned with the modeling, analogue and tests of an interconnected four electric machine voltage control system. Many analogue studies of electric machines have been done but most are concerned with the development of analogue techniques and only a few give substantiation of the validity of the analogue models through comparison of results from analogue studies and from real machine tests. Chapter 2 describes the procedure and the system under study. Chapter 3 describes the methods used for the determination of the electrical and mechanical system parameters. -

FOR PREDICTING INIJJ'c'l'ion MOTOR CHARACTERISTICS I
AN IMPROVED METHOD FOR PREDICTING INIJJ'C'l'ION MOTOR CHARACTERISTICS i AN D ROVED FOR REDICTlNG llTDUC'l'ION MOTO CHA.RAOTERIBT'IOS I' Bachelor of Science :Montana State College BOZtX!lM , , onto.na 1944 j;;)u.bmitt to tho De artnont of leotricnl EngiMeri g Cklaho J..gricultur and rcohenieul College In purtiul Ful.:f'illmen'l; of t e Re0ui ents tor the gree of' STER OF ..:>C ~en 1947 ii OKY.l~fl:\H .1:J:?RO D BY: !GIUCrL TFP..U i M' nwrn· 11, c·m 1, L J B R ,\ • v . DE'C 8 1947 llea! of £fie bepartiii.ent ') r ·> P , .... I ) ~ ~1 J . iii PREFiVJE The induction motor is one o.. f' the most u.se:tul · electrie maohines in industry today. Since its inverrtion in 1888 by !'Jikola Telsa, it has eonstantl;r bee:n replacing other types of machines, both eleotrio .ru1.d meehanieal, as a raeans of supply ing 111sehanioal po;:er. Ma.de in its diversified for.ID1J,. an induction riaotor et:.m be made t;.o fit a.lm.ost any torq_ue-speed requirement. In its most common form., the normal-starting-current. normal-starting-torque, squirrel-cage induction motor., it offers such a.dvantae;es as high effioiency:t practioally constant speed, extremely sirn.plo ope:rationt a11d s:m.s.11 electrical na.intenance requirements. Because e:f the induction moto~•s wide use, it is advantageous to both the roanu:faoturer and the consumer to be able to ascertain, as aoeurately and si:Ll1ply as possible, hmv a given motor vrill operate under varying eondi tions of load. -

Course Description Bachelor of Technology (Electrical Engineering)
COURSE DESCRIPTION BACHELOR OF TECHNOLOGY (ELECTRICAL ENGINEERING) COLLEGE OF TECHNOLOGY AND ENGINEERING MAHARANA PRATAP UNIVERSITY OF AGRICULTURE AND TECHNOLOGY UDAIPUR (RAJASTHAN) SECOND YEAR (SEMESTER-I) BS 211 (All Branches) MATHEMATICS – III Cr. Hrs. 3 (3 + 0) L T P Credit 3 0 0 Hours 3 0 0 COURSE OUTCOME - CO1: Understand the need of numerical method for solving mathematical equations of various engineering problems., CO2: Provide interpolation techniques which are useful in analyzing the data that is in the form of unknown functionCO3: Discuss numerical integration and differentiation and solving problems which cannot be solved by conventional methods.CO4: Discuss the need of Laplace transform to convert systems from time to frequency domains and to understand application and working of Laplace transformations. UNIT-I Interpolation: Finite differences, various difference operators and theirrelationships, factorial notation. Interpolation with equal intervals;Newton’s forward and backward interpolation formulae, Lagrange’sinterpolation formula for unequal intervals. UNIT-II Gauss forward and backward interpolation formulae, Stirling’s andBessel’s central difference interpolation formulae. Numerical Differentiation: Numerical differentiation based on Newton’sforward and backward, Gauss forward and backward interpolation formulae. UNIT-III Numerical Integration: Numerical integration by Trapezoidal, Simpson’s rule. Numerical Solutions of Ordinary Differential Equations: Picard’s method,Taylor’s series method, Euler’s method, modified -

TRUET Bo THOMPSON \'• Bachelor of Science Louisiana Poiytechnic Institute 1948
i SOME ASPECTS OF SINGLE PH.A.SE INDUCTION MOTOR THEORY By TRUET Bo THOMPSON \'• Bachelor of Science Louisiana Poiytechnic Institute 1948. Submitted to ·the Faculty of the Graduate School of the Oklahoma Agricultural and Mechanical College in Partial Fulfillment of the Requirements for the Degree of MASTER OF SCIENCE 1950 ii SOME ASPECTS OF SINGLE PHASE INDUCTION MOTOR THEORY ' TRUET Bo THOMPSON MASTER OF SCIENCE 1950 THESIS AND ABSTRACT APPROVED: FacultYi~~ De~f!ue Graduate School 266841 iii PREFACE For more than 50 years the two distinct theories of single phase motor operation, the cross-field theory and the double revolving field theory, have been used to explain the charac teristics of these motors. Neither is entirely satisfactory either in its calculation of characteristics or in the physical conception of the motor's operation. The complexity and actual mystery involved have defied through this half century efforts to si~lify and correlate completely the theories now extant. This paper is designed, not to perform this task, nor to develop a new concept, but rather to bring together a· few ideas which have been helpful in the work which was carried on in the belief that there can be a more satisfactory explanation of single phase moto~ operation. iv ACKNOWLEDGMENT The writer wishes to express his sincere appreciation to Professor C& Fo Cameron for his encouragement, his reading of this material and his many helpful suggestions concerning it., V TABLE OF CONTENTS CHA PTER I. • • • • • • • . • . 1 The Double Revolving Field. • . • ••••. 1 Two Oppositely Rotating Fields in a Single Stator. • • 13 Two Oppositely Rotating Fields in Two Stators • • • • • 25 Mathematical Development by Equivalent Circuit •• • • • 29 Another Approach to Performance Equations . -

EE6402 – TRANSMISSION and DISTRIBUTION UNIT-I 1. Why High Voltage Is Preferred for Power Transmission? (MJ15, ND15, MJ16) 2. S
EE6402 – TRANSMISSION AND DISTRIBUTION UNIT-I 1. Why high voltage is preferred for power transmission? (MJ15, ND15, MJ16) As voltage increases, current flow through the line decreases and I2R loss reduces. So transmission efficiency increases. Therefore high voltage is preferred for power transmission. 2. State the disadvantages of HVDC transmission. (ND10) i) High cost of terminal equipment ii) Converters require considerable reactive power. iii) Harmonics are generated which requires filters. iv) Converters do not have overload capacity. 3. Why the transmission lines 3 phase 3 wire circuits while distribution lines are 3ϕ, 4 wire circuits? (ND10, ND13) A Balanced 3 phase circuit does not require the neutral conductor, as the instantaneous sum of the 3 line currents are zero. Therefore the transmission lines and feeders are 3 phase 3 wire circuits. The distributors are 3 phase 4 wire circuits because a neutral wire is necessary to supply the 1 phase loads of domestic and commercial consumers. 4. Define the terms feeders and service mains. (ND11, ND15) Feeders: It is a conductor which connects the substation to the area where power is to be distributed. Generally, no tappings are taken from the feeder. Service mains: A service main is generally a small cable which connects the distributor to the consumer’s terminal. 5. List out the advantages of high voltage A.C transmission. (ND11) i) The power can be generated at high voltages. ii) The maintenance of ac substation is easy and cheaper. 6. What is ring main distributor? (ND12, MJ17) In ring main distributor, the distributor is in the form of a closed ring. -

B. Tech Electrical.Pdf
JECRC University Course Structure for Electrical Engineering (B.Tech.) JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester III Subject Code Subject Contact Hrs Credits L-T-P Electronics Devices & Circuits 3-1-2 5 Circuit Analysis – I 3-1-0 4 Electrical Machines – I 3-1-2 5 Electrical Measurements 3-1-2 5 Mathematics – III 3-1-0 4 Computer Programming – I 3-0-2 4 Total 18-5-8 27 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester IV Subject Code Subject Contact Hrs Credits L-T-P Analogue Electronics 3-1-2 5 Digital Electronics 3-0-2 4 Circuit Analysis – II 3-1-0 4 Electrical Machines – II 3-1-2 5 Advanced Mathematics 3-1-0 4 Generation of Electric Power 3-0-0 3 Total 18-4-6 25 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester V Subject Code Subject Contact Hrs Credits L-T-P Power Electronics-I 3-1-2 5 Microprocessor & Computer 3-0-2 4 Architecture Transmission & Distribution – I 3-1-0 4 Control Systems 3-1-2 5 Utilization of Electrical Power 3-0-0 3 Digital Signal Processing 3-0-0 3 Total 18-3-6 24 JECRC UNIVERSITY Faculty of Engineering & Technology B.Tech in Electrical Engineering Teaching Scheme Semester VI Subject Code Subject Contact Hrs Credits L-T-P Power Electronics –II 3-1-2 5 Power System Analysis 3-1-2 5 EHV AC/DC Transmission 3-0-0 3 Switch Gear & protection 3-0-0 3 Instrumentation 3-0-0 3 Transmission & Distribution – II 3-1-0 4 Economics 0-0-2 1 -

Transmission and Distribution
EE 6402 TRANSMISSION AND DISTRIBUTION A Course Material on TRANSMISSION AND DISTRIBUTION By Mr. S.VIJAY ASSISTANT PROFESSOR DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING SASURIE COLLEGE OF ENGINEERING VIJAYAMANGALAM – 638 056 1 SCE ELECTRICAL AND ELECTRONICS ENGINEERING EE 6402 TRANSMISSION AND DISTRIBUTION QUALITY CERTIFICATE This is to certify that the e-course material Subject Code : EE 6402 Subject : TRANSMISSION AND DISTRIBUTION Class : II Year EEE Being prepared by me and it meets the knowledge requirement of the university curriculum. Signature of the Author Name: Designation: This is to certify that the course material being prepared by Mr. S.VIJAY is of adequate quality. He has referred more than five books among them minimum one is from aboard author. Signature of HD Name: SEAL 2 SCE ELECTRICAL AND ELECTRONICS ENGINEERING EE 6402 TRANSMISSION AND DISTRIBUTION UNIT I STRUCTURE OF POWER SYSTEM 9 Structure of electric power system: generation, transmission and distribution; Types of AC and DC distributors – distributed and concentrated loads – interconnection – EHVAC and HVDC transmission -Introduction to FACTS. UNIT II TRANSMISSION LINE PARAMETERS 9 Parameters of single and three phase transmission lines with single and double circuits - Resistance, inductance and capacitance of solid, stranded and bundled conductors, Symmetrical and unsymmetrical spacing and transposition - application of self and mutual GMD; skin and proximity effects - interference with neighboring communication circuits - Typical configurations, conductor types and electrical parameters of EHV lines, corona discharges. UNIT III MODELLING AND PERFORMANCE OF TRANSMISSION LINES 9 Classification of lines - short line, medium line and long line - equivalent circuits, phasor diagram, attenuation constant, phase constant, surge impedance; transmission efficiency and voltage regulation, real and reactive power flow in lines, Power - circle diagrams, surge impedance loading, methods of voltage control; Ferranti effect. -

Open Circuit & Short Circuit Test on a Single Phase Transformer
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING ELECTRICAL MACHINES-II LABARATORY LIST OF EXPERIMENTS Sl.No Name of the Experiment Page no 1 OPEN CIRCUIT & SHORT CIRCUIT TEST ON A SINGLE PHASE 3 TRANSFORMER 2 SUMPNERS TEST 10 3 SCOTT CONNECTION OF TRANSFORMERS 15 4 NO LOAD AND BLOCKED ROTOR TEST ON A 3- ɸ 18 INDUCTION MOTOR 5 REGULATION OF ALTERNATOR USING SYNCHRONOUS 23 IMPEDANCE METHOD 6 ‘V’ AND ‘INVERTED V’ CURVES OF SYNCHRONOUS MOTOR 29 7 EQUIVALENT CIRCUIT OF A SIGLE PHASE INDUCTION 35 MOTOR 8 BRAKE TEST ON 3- ɸ SQUIRREL CAGE INDUCTION MOTOR 40 9 PARALLEL OPERATION OF 1-Φ TRANSFORMERS 46 10 DETERMINATION OF Xd AND Xq OF SALIENT POLE 51 SYNCHRONOUS MOTOR OPEN CIRCUIT & SHORT CIRCUIT TEST ON A SINGLE PHASE TRANSFORMER AIM: To perform open circuit and short circuit test on a single phase transformer and to Pre-determine the efficiency, regulation and equivalent circuit of the transformer. APPARATUS REQUIRED: Sl. equipment Type Range Quantity No. (0-300)V 1 no 1 Voltmeter MI (0-150)V 1 no (0-2)A 1 no 2 Ammeter MI (0-20)A 1 no (0-150)V LPF 3 Wattmeter Dynamo type 1 no (0-2.5)A (0-150)V UPF 4 Wattmeter Dynamo type 1 no (0-10)A 5 Connecting Wires ***** ***** Required Transformer Specifications: Transformer Rating :( in KVA) = 2KVA Winding Details: LV (in Volts): 115V LV side current: 17.8A HV (in Volts): 230V HV side Current: 4.5A Type (Shell/Core): SHELL Auto transformer Specifications: Input Voltage (in Volts): 270V Output Voltage (in Volts): 230V Frequency (in Hz): 50HZ Current rating (in Amp): 10A CIRCUIT DIAGRAM: OPEN CIRCUIT: SHORT CIRCUIT: PROCEDURE: Open circuit test: 1. -
Simulation of Induction Motor Characteristics Using a Circle Diagram
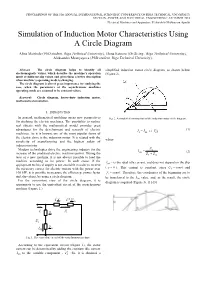
PROCEEDINGS OF THE 51st ANNUAL INTERNATIONAL SCIENTIFIC CONFERENCE OF RIGA TECHNICAL UNIVERSITY SECTION „POWER AND ELECTRICAL ENGINEERING”, OCTOBER 2010 Electrical Machines and Apparatus / Elektrisk s Maš nas un Apar ti Simulation of Induction Motor Characteristics Using A Circle Diagram Alina Meishele (PhD student, Riga Technical University), Elena Ketnere (Dr.Sc.ing., Riga Technical University), Aleksandrs Mesnyayevs (PhD student, Riga Technical University). Abstract – The circle diagram helps to identify all simplified induction motor circle diagram, as shown below electromagnetic values, which describe the machine’s operation (Figure 2). mode at different slip values and gives them a better description when machine’s operating mode is changing. The circle diagram is also of great importance for studying the case, when the parameters of the asynchronous machines operating mode are assumed to be constant values. Keywords – Circle diagram, heavy-duty induction motor, mathematical simulation. I. INTRODUCTION In general, mathematical modeling opens new perspectives Fig. 2. A simplified construction of the induction motor circle diagram. for studying the electric machines. The possibility to replace real objects with the mathematical model provides great (1) advantages for the development and research of electric I I ( I ) machines. As it is known, one of the most popular forms of 1 00 2 the electric drive is the induction motor. It is related with the where simplicity of manufacturing and the highest safety of induction motor. Modern technologies drive the engineering industry for the U1 I 00 (2) increase of the produced electric machines power. During the Z1 Z m tests of a new machine, it is not always possible to load the machine according to its power. -
Electrical Machine Ii Lab Lab Manual (Ee – 327 – F) V Semester
ELECTRICAL MACHINE II LAB LAB MANUAL (EE – 327 – F) V SEMESTER DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING DRONACHARYA COLLEGE OF ENGINEERING, KHENTAWAS, GURGAON – 123506 CONTENTS Sr.No TITLE Page No. 1. Study of the No Load and Block Rotor Test in a Three Phase Slip Ring Induction Motor & draw its circle diagram 2. To perform O.C. test on synchronous generator. And determine the full load regulation of a three phase synchronous generator by synchronous impedance method 3. To Study and Measure Direct and Quadrature Axis Reactance of a 3 phase alternator by Slip Test 4. To Study and Measure Positive, Negative and Zero Sequence Impedance of a Alternator 5. Synchronization of two Three Phase Alternators, by a) Synchroscope Method b) Three dark lamp Method c) Two bright one dark lamp Method 6. To plot V- Curve of synchronous motor. 7. To Start Induction motor by Rotor resistance starter 8. Regulation of 3-phase alternator by ZPF and ASA methods 9. Star-delta starting of a three phase induction motor 10. Load test on three phase Induction motor EXPERIMENT NO: 01 AIM:- STUDY OF THE NO LOAD AND BLOCK ROTOR TEST IN A THREE PHASE SLIP RING INDUCTION MOTOR & DRAW ITS CIRCLE DIAGRAM APPARATUS:- 3 phase Induction motor with belt and pulley arrangement , three phase supply, wattmeters , ammeter and voltmeter FORMLULAE Coso=Wo / √3 VoIo Cosr=Wbr / √3 VbrIbr Ibm = Ibr (Vo/Vbr) 2 Wbm = Wbr (Vo/Vbr) 2 Stator copper loss = 3 Ibr Rs PRECAUTION 1. The 3 autotransformer should be kept at initial position. 2. Initially the machine should be under no load condition. -

Electric Machines
Electrical Engineering Electric Machines Comprehensive Theory with Solved Examples and Practice Questions Publications Publications MADE EASY Publications Corporate Office: 4-A/4,4 Kalu Sarai (Near Hauz Khas Metro Station), New Delhi-110016 E-mail: [email protected] Contact: 011-45124660, 8860378007 Visit us at: www.madeeasypublications.org Electric Machines © Copyright by MADE EASY Publications. All rights are reserved. No part of this publication may be reproduced, stored in or introduced into a retrieval system, or transmitted in any form or by any means (electronic, mechanical, photo-copying, recording or otherwise), without the prior written permission of the above mentioned publisher of this book. First Edition : 2015 Second Edition : 2016 Third Edition: 2017 Fourth Edition: 2018 Fifth Edition: 2019 Sixth Edition: 2020 © All rights reserved by MADE EASY PUBLICATIONS. No part of this book may be reproduced or utilized in any form without the written permission from the publisher. Contents Electric Machines Chapter 1 2�17 Voltage Regulation �������������������������������������������������������������������32 Magnetic Circuits ����������������������������������������������� 1 2�18 Losses and Efficiency ���������������������������������������������������������������36 1�1 Magnetic Circuits������������������������������������������������������������������������� 1 2�19 Transformer Efficiency �������������������������������������������������������������37 1�2 Leakage Flux ���������������������������������������������������������������������������������