Thheoretical and Experimental, Studies Ok the Magnetic Fields of a Rotamak Discharge
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
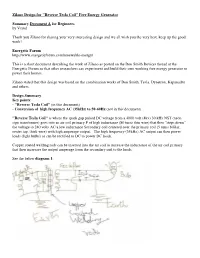
Zilano Design for "Reverse Tesla Coil" Free Energy Generator
Zilano Design for "Reverse Tesla Coil" Free Energy Generator Summary Document A for Beginners by Vrand Thank you Zilano for sharing your very interesting design and we all wish you the very best, keep up the good work! Energetic Forum http://www.energeticforum.com/renewable-energy/ This is a short document describing the work of Zilano as posted on the Don Smith Devices thread at the Energetic Forum so that other researchers can experiment and build their own working free energy generator to power their homes. Zilano stated that this design was based on the combination works of Don Smith, Tesla, Dynatron, Kapanadze and others. Design Summary Key points : - "Reverse Tesla Coil" (in this document) - Conversion of high frequency AC (35kHz) to 50-60Hz (not in this document) "Reverse Tesla Coil" is where the spark gap pulsed DC voltage from a 4000 volt (4kv) 30 kHz NST (neon sign transformer) goes into an air coil primary P of high inductance (80 turns thin wire) that then "steps down" the voltage to 240 volts AC a low inductance Secondary coil centered over the primary coil (5 turns bifilar, center tap, thick wire) with high amperage output. The high frequency (35kHz) AC output can then power loads (light bulbs) or can be rectified to DC to power DC loads. Copper coated welding rods can be inserted into the air coil to increase the inductance of the air coil primary that then increases the output amperage from the secondary coil to the loads. See the below diagram 1 : Parts List - NST 4KV 20-35KHZ - D1 high voltage diode - SG1 SG2 spark gaps - C1 primary tuning HV capacitor - P Primary of air coil, on 2" PVC tube, 80 turns of 6mm wire - S Secondary 3" coil over primary coil, 5 turns bifilar (5 turns CW & 5 turns CCW) of thick wire (up to 16mm) with center tap to ground. -

° 2, 2,644 3,037,175 United States Patent Office Patented May 29, 1962 1
May 29, 1962 C, L RUTHROFF 3,037,175 BROADBAND TRANSFORMERS Filed May 12, 1958 A/G 3 A/G, 4. ° 2, 2,644 3,037,175 United States Patent Office Patented May 29, 1962 1. 2 some saving in space and material is affected by winding 3,037,175 BROADBANDTRANSFORMERS all the coils on a common core. This may be done since Clyde L. Ruthroff, Fair Haven, N.J., assignor to Bell the net magnetic field resulting from the flow of signal Telephone Laboratories, Incorporated, New York, current is zero, and consequently there is no magnetic N.Y., a corporation of New York coupling among the several coils even though they share Fied May 12, 1958, Ser. No. 734,751 a common magnetic core. The magnetizing current, 3 Claims. (C. 333-32) however, does produce a net magnetic field. Conse quently, by winding the several coils series aiding for This invention relates to impedance transforming de the magnetizing current, there is a net increase in the vices and, more particularly, to broadband bifilar wound number of coupled turns, and the corresponding increase autotransformers. O in the effective transformer inductance. This has the The problem of distortionless transmission of signals effect of extending the low frequency end of the trans over wires is an old one, encountered often in electrical former pass band. The difficulty with such an arrange communications systems. As the range of operating fre ment, however, resides in the care which must be taken quencies is extended, as is the current trend, this prob in winding the transformer so as to minimize the inter lem has become more and more acute. -

Tesla's Lighting Methods
Panacea-BOCAF On-Line University The educational series covering clean energy technology towards building our children a future. Panacea-BOCAF is a registered non-profit organization, dedicated to educational study and research. All copyrights belong to their owners and are acknowledged. All material presented on this web site is either news reporting or information presented for non-profit study and research, or has previously been publicly disclosed or has implicitly or explicitly been put into the public domain. Fair Use applies. Contact us. Overview…………………………………………………………………………………………………... Description………………………………………………………………………………………………… Replication………………………………………………………………………………………………… Faculty information……………………………………………………………………………………… Supplies…………………………………………………………………………………………………….. Technical support forum………………………………………………………………………………... Replication Videos………………………………………………………………………………………. Links…………………………………………………………………………………………………………. Credits……………………………………………………………………………………………………… Over View Lidmotor’s -Bedini Fan fused with the Imhotep radiant oscillator PLEASE NOTE – You are working with high voltage here, do not attempt this with out a qualified electrician present, always use insulated probes pliers, screwdrivers etc when working on HV. Do not experiment with this unless you’re a qualified electrician. Quote-All you guys, who want to light your homes on a SMALL FRACTION of the electricity that you currently use, keep an eye on this thread. Tesla's HV impulse lighting methods are about to make a COMEBACK!!! The implications for solar homes or other "off-grid" living are enormous. Imhotep is the next "future legend" in this field of research!! His circuits are simple and effective. His adaptations are original, and they WORK – Peter Lindemann End Quote. Imhotep and his Wife Shiva’s have open source their circuits into the public domain. Their goals are to make safe and bug free circuits that work with a universal parts list so no one has any difficulty getting the parts needed. -

Building Easy Bitx 2 0Mt 80MT/40MT/20MT
INKITS Building Easy Bitx 2 0mt 80MT/40MT/20MT Sunil Lakhani VU3SUA Our sincere condolence to the people who passed away due to Covid19- Prayers for the departed souls Website: https://amateurradiokits.in 20 20 Building the Easy Bitx Version 1 for 20Mt Band Easy Bitx 20Mt Exciter NOTE : Kindly double check all resistors value’s with a multi meter before mounting them on the pcb, and also all other components too, this is to avoid any damage to the board since it is a double sided PTH board, it would be very difficult to repair the tracks if they get damaged. 2 INKITS Easy Bitx VFO BFO INKITS AGC with Vu Meter 3 Warning do not use power supply without a fuse, The PCB can be damaged if there is any short circuit in your connections or wrong wiring, so to avoid shorts please use a 2 amps fuse in your power supply. Introduction to Easy Bitx This new easy bitx version 1 ssb transceiver is made for old timers and new hams who wish to learn homebrew an ssb tcvr. All attempts have been made to provide maximum information relating to the construction of the project. The full kit contains PCBs, parts, VFO BFO module and chassis. Basic kit is also available. During assembly you should review the photographs of the completed Boards (part of the kit documentation) to verify your build and answer questions you may have during your build. This is a mono band transceiver that can operate on any 3 band 80mt 40mt and 20mt. -

Bachelor's Thesis
KLAIPEDA UNIVERSITY FACULTY OF MARINE ENGINEERING DEPARTMENT OF ELECTRICAL ENGINEERING I________________________HEREBY CONIFIRM Head of department: prof. dr. Eleonora Guseinovienė 2013 BACHELOR STUDY PROGRAME OF ELECTRICAL ENGINEERING (Code of studies 612H62003) FINAL THESIS RESEARCH OF PERMANENT MAGNET GENERATOR WITH COMPENSATED REACTANCE WINDINGS Editor: ________________________ Supervisors: Prof. dr. Eleonora Guseinovienė 2013 Boris Rudnickij 2013 Authors: TEI-09 Oleg Lyan HENALLUX Vincent Monet 2013 Klaipėda, 2013 TEI-09, O.Lyan, V.Monet Research of PMG with compensated reactance winding ABSTRACT In this thesis, a patented “bifilar” coil (BC) type permanent magnet generator (PMG) is constructed for scientific research and comparison with other technologies. The features, working principle and elements of the BCPMG are analyzed. The BCPMG is developed from the iron-cored “bifilar” coil topology based on (1) in an attempt to overcome the problems with current rotary type generators, which have so far been dominant on the market. One of the problems is armature reactance , which is usually bigger than resistance . The circumstance creates difficulties for designers and operators of the generator. That is why patented technology is offered to partially remove or absolutely neglect the reactance of the machine. Drawings of the PMG parts and assembly are added. A finite element magnetic model (FEMM) is presented and analyzed. Also, this thesis contains an experimental analysis of the PMG characteristics, such as no- load losses and EMF vs. speed, loaded voltage drop, power output and efficiency vs. load current at different speeds. 3 TEI-09, O.Lyan, V.Monet Research of PMG with compensated reactance winding LIST OF TABLES 1.1. Table. -

III IIII US00552.5871A United States Patent 19) 11 Patent Number: 5,525,871 Bray Et Al
III IIII US00552.5871A United States Patent 19) 11 Patent Number: 5,525,871 Bray et al. 45) Date of Patent: Jun. 11, 1996 54 ELECTRODELESS DISCHARGE LAMP 4,240,010 12/1980 Buhrer .................................... 315,248 CONTAINING PUSH-PULL CLASS E 4,245,178 1/1981 Justice .. 315,248 AMPLIFER AND BIFILAR COIL 4,245,179 1/1981 Buhrer ..... ... 35/248 4,253,047 2/1981 Walker et al. ... ... 31.5/248 (75) Inventors: Derek Bray, Los Altos; Timothy P. 2. A. Whike a 3: Murphy s Sieger both of 4,376,912 3/1983 Jermakoff ............. ... 3151248 Ountain VieW, all Of Calif. 4,383,203 5/1983 Stanley ... 315/248 4,390,813 6/1983 Stanley. 315,248 73) Assignee: Diablo Research Corporation, 4,422,017 12/1983 Denneman et al. 315,248 Sunnyvale, Calif. 4,536,675 8/1985 Postma ...................................... 313/46 21 Appl. No.: 382,824 (List continued on next page.) 22 Filed: Feb. 3, 1995 FOREIGN PATENT DOCUMENTS ( U 0021168 6/1979 European Pat. Off. ......... H01J 65/00 Related U.S. Application Data 00.16542 10/1980 European Pat. Off. ......... H01J 65/00 0162504 4/1984 European Pat. Off. ......... H01J 65/04 (63) Continuation of Ser. No. 230,451 Apr. 20, 1994, abandoned, WO91/11017 7/1991 WIPO ............................. H01J 65/04 which is a continuation of Ser. No. 955,528, Oct. 1, 1992, abandoned, which is a continuation-in-part of Ser. No. OTHER PUBLICATIONS 894,020, Jun. 5, 1992, Pat. No. 5,387,850. (51) Int. Cl. ........................ H05B 41/16 Brochure Gof the operating principles of the Philips QL lamp 52 U.S. -
Overunity Joule Thief
December GETTING IT TO WORK IS A LOT EASIER THAN EXPLAINING WHY IT WORKS 17, 2013 Overunity Joule Thief (The circuit has almost nothing to do with Joule James, I Just lie to remember him) 1 Leonard Teasca, BSc Electrical Engineering Phone No: +40 723 520 684; Email: [email protected] December GETTING IT TO WORK IS A LOT EASIER THAN EXPLAINING WHY IT WORKS 17, 2013 1.Introduction This presentation is intended for both technical and nontechnical people so if you see an inexact nontechnical explanation keep in mind that it is not my intention to mislead or insult anyone’s inteligence. The Joule Thief is one of many overunity devices out there. It has been around for many years yet is stands as a simple voltage booster. I think that is why it still exists and also because they can’t control the internet (we know they tried). A JT (Joule Thief) is a very simple and easy to build self oscillator. ! To understand the concept of an oscillator think about switching the light in your bedroom on and off once every second. That will give you a switching frequency of 1 Hertz. Now imagine the you have an electronic device that does this for you automatically. So now the light in your room will oscillate with the frequency of 1 Hertz (will turn on and off every second)...” I believe that the JT oscillates at the resonant frequency of the circuit (I’m unable to determine this due to lack of equipment – LCR meter) The working principle of such a circuit is simple at first glance but simplicity is the genius in all. -
Free Energy Research Basics
Free Energy Research Basics Chapter 4. Bifilar coils ............................................................................................................................... 2 Permanent magnets ................................................................................................................................ 2 Magnetic field of a”regular” coil ........................................................................................................... 6 Simple magnetic field probe................................................................................................................... 8 Magnetic field of bifilar coil .................................................................................................................. 9 Magnetic field of bifilar coil 2 ............................................................................................................. 13 Opposite coils on ferrite rod................................................................................................................. 17 Opposite coils on the ring core............................................................................................................. 20 Reversed Phi transformer ..................................................................................................................... 24 Scalar coil............................................................................................................................................. 26 Chapter 5. Displacement current............................................................................................................. -

A Noobs Guide to Ufopolitics Rev.1.1 2-7-12.Pdf
a noobs guide to Ufopolitics art of, Indirect Current(IC), Cold Current (CC), radiant, Cold Electriciy(CE)? Essential circuit diagram download > https://dl.dropbox.com/u/72933791/JohnStone%20public/Frequency%20Generaator/PWM%20FET% 20driver%20V2.pdf I have tried this output on typical DC brush motors, they go beyond estimated top speed...rated to go that fast at a consumption of @ 36 Volts, However using this just simple arrangement of Coil-Diodes it uses 4.0 Volts, going over speed limits, but the must impressive thing is...as they accelerate they become much colder. If this is truly cold current you should be able to run it through a resistive load and the resistor should cool down. Suggested loads after diodes on 'cold' side Running the system without a load at Radiant Output will give you completely false readings at output, besides, Radiant will definitively Retro-Feedback into your circuit through Input (before diodes) and could blow your Mosfet's and other components. So, there must be at least a Load Resistor at Output at all times...but remember that Radiant goes through resistance without any effort, so the resistor must be set according to RE tolerance...meaning, a very low resistor of lower Kilo ohms, would do absolutely nothing, Nada. (exactly what load resistor is best?) -Self ballasted fluorescent with fitting - 125 W/120V - you will just need @ 2000 Hz in output...spending @800Hz input. Have a group of CFL's or at least one connected to output. You have to slowly start increasing frequency, till you start seeing the CFL's flashing and going brighter as you turn frequency higher, until you get to the Max Point of steady brightness, from there you start going up...but watch the meters or will blow CFL's. -

Guidelines to Bucking Coils. Lenz's Law Free Power Extraction
Guidelines to Bucking Coils. Lenz’s Law Free Power Extraction. By Chris Sykes (hyiq.org)(EMJunkie) Version 2.5 Fig 1: Typical Bucking Power Output Coil, one configuration. Requirements: 1. At least two (2) Coils (Partnered Output Coils) must be used for each single Power Output Coil. 2. Each of the two power coils is best to have different direction of winding, relative to the Right Hand Rule applied to the Core. 3. The Magnetic Field MUST be thought of in a quite different way to the conventional thinking. More explained on this below. 푉2 4. Step Up techniques must be used, Power 푃 = 푉 푥 퐼 or Where R is the Resistance of the 푅 푃 wire, I is the Current and V is the Voltage. 퐼 = √ So this means that the Resistance of the 푅 power Coil must also be taken into account, according to normal theory. Here, not so. 5. One input or Excitation coil per Power Coil. 6. Input or Excitation Coil is best to occupy only one half of the Power Coils Geometry. 7. The Bloch Walls of the Input/Excitation Coils is best not to overlap or exist in the same space as an artificial moving Bloch Wall. What does not Work: Circuit Equivalent: Circuit Equivalent: The above does not work primarily because the Magnetic Field as we understand it, is incomplete. The A Vector Potential and the Magnetic Field – A, and Phi. Below Picture for illustratory purposes: Note: Arrows pointing to the Right indicate the Right Hand Rule as applied to the magnetic Field. -

Testing Feasibility of Inductive Power Coupling for Modern Applications
TESTING FEASIBILITY OF INDUCTIVE POWER COUPLING FOR MODERN APPLICATIONS by Andrew Burman BioResource and Agricultural Engineering BioResource and Agricultural Engineering Department California Polytechnic State University San Luis Obispo 2016 TITLE : Testing Feasibility of Inductive Power Coupling for Modern Applications AUTHOR : Andrew Burman DATE SUBMITTED : June 3, 2016 Art MacCarley Senior Project Advisor Signature Date Charlie Crabb Department Head Signature Date ii ABSTRACT This project takes two bifilar tesla coils and uses them to find a % efficiency of power transfer as distances between the coils decrease. The reason this experiment is being conducted is to find possible implications for wireless charging of vehicles using similar style coils. This project conducted experiments on 60 Hz, 400 Hz, and 1 kHz frequencies for a small input signal. The general conclusion is that as the frequency increases more power can be transferred and higher efficiency of power transfer is seen. This project also concluded that it could be possible to get higher efficiency at a greater distance with a higher input power frequency. There would of course be tradeoffs for achieving a certain charge time, but this project is concerned in the possibility of a greater gap being used so that charging could be done on a wide variety of vehicle applications. These applications would range from public transport, domestic, or freight. iii DISCLAIMER STATEMENT The university makes it clear that the information forwarded herewith is a project resulting from a class assignment and has been graded and accepted only as a fulfillment of a course requirement. Acceptance by the university does not imply technical accuracy or reliability. -

Free Energy Research Basics
Free Energy Research Basics Chapter 5. Displacement current................................................................................................................ 2 How they do that? .................................................................................................................................. 2 Coaxial transformer with a «pipe»......................................................................................................... 7 Properties of coaxial transformer ........................................................................................................... 9 Displacement current in capacitor........................................................................................................ 12 Capacitor with a coil on ring core ........................................................................................................ 16 Capacitor with a coil of ferrite rod ....................................................................................................... 19 Coil - capacitor ..................................................................................................................................... 24 Aligned and anti-aligned connection.................................................................................................... 27 Coil-capacitor on the ring core............................................................................................................. 30 Chapter 6. Negative resistance ................................................................................................................