Model-Based Diagnostics for an Aircraft Auxiliary Power Unit
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cranfield University Xue Longxian Actuation
CRANFIELD UNIVERSITY XUE LONGXIAN ACTUATION TECHNOLOGY FOR FLIGHT CONTROL SYSTEM ON CIVIL AIRCRAFT SCHOOL OF ENGINEERING MSc by Research THESIS CRANFIELD UNIVERSITY SCHOOL OF ENGINEERING MSc by Research THESIS Academic Year 2008-2009 XUE LONGXIAN Actuation Technology for Flight Control System on Civil Aircraft Supervisor: Dr. C. P. Lawson Prof. J. P. Fielding January 2009 This thesis is submitted in fulfilment of the requirements for the degree of Master of Science © Cranfield University 2009. All rights reserved. No part of this publication may be reproduced without the written permission of the copyright owner. ABSTRACT This report addresses the author’s Group Design Project (GDP) and Individual Research Project (IRP). The IRP is discussed primarily herein, presenting the actuation technology for the Flight Control System (FCS) on civil aircraft. Actuation technology is one of the key technologies for next generation More Electric Aircraft (MEA) and All Electric Aircraft (AEA); it is also an important input for the preliminary design of the Flying Crane, the aircraft designed in the author’s GDP. Information regarding actuation technologies is investigated firstly. After initial comparison and engineering consideration, Electrohydrostatic Actuation (EHA) and variable area actuation are selected for further research. The tail unit of the Flying Crane is selected as the case study flight control surfaces and is analysed for the requirements. Based on these requirements, an EHA system and a variable area actuation system powered by localised hydraulic systems are designed and sized in terms of power, mass and Thermal Management System (TMS), and thereafter the reliability of each system is estimated and the safety is analysed. -

Development and Flight Test Experiences with a Flight-Crucial Digital Control System
NASA Technical Paper 2857 1 1988 Development and Flight Test Experiences With a Flight-Crucial Digital Control System Dale A. Mackall Ames Research Center Dryden Flight Research Facility Edwards, Calgornia I National Aeronautics I and Space Administration I Scientific and Technical Information Division I CONTENTS Page ~ SUMMARY ................................... 1 I 1 INTRODUCTION . 1 2 NOMENCLATURE . 2 3 SYSTEM SPECIFICATION . 5 3.1 Control Laws and Handling Qualities ................. 5 3.2 Reliability and Fault Tolerance ................... 5 4 DESIGN .................................. 6 4.1 System Architecture and Fault Tolerance ............... 6 4.1.1 Digital flight control system architecture .......... 6 4.1.2 Digital flight control system computer hardware ........ 8 4.1.3 Avionics interface ...................... 8 4.1.4 Pilot interface ........................ 9 4.1.5 Actuator interface ...................... 10 4.1.6 Electrical system interface .................. 11 4.1.7 Selector monitor and failure manager ............. 12 4.1.8 Built-in test and memory mode ................. 14 4.2 ControlLaws ............................. 15 4.2.1 Control law development process ................ 15 4.2.2 Control law design ...................... 15 4.3 Digital Flight Control System Software ................ 17 4.3.1 Software development process ................. 18 4.3.2 Software design ........................ 19 5 SYSTEM-SOFTWARE QUALIFICATION AND DESIGN ITERATIONS ............ 19 5.1 Schedule ............................... 20 5.2 Software Verification ........................ 21 5.2.1 Verification test plan .................... 21 5.2.2 Verification support equipment . ................ 22 5.2.3 Verification tests ...................... 22 5.2.4 Reverifying the design iterations ............... 24 5.3 System Validation .......................... 24 5.3.1 Validation test plan . ............... 24 5.3.2 Support equipment ....................... 25 5.3.3 Validation tests ....................... 25 5.3.4 Revalidation of designs ................... -
Air Force Airframe and Powerplant (A&P) Certification Program
Air Force Airframe and Powerplant (A&P) Certification Program Introduction: Most military aircraft maintenance technicians are eligible to pursue the Federal Aviation Administration (FAA) Airframe & Powerplant (A&P) certification based on documented evidence of 30 months practical aircraft maintenance experience in airframe and powerplant systems per Title 14, Code of Federal Regulations (CFR), Part 65- Certification: Airmen Other Than Flight Crew Members; Subpart D-Mechanics. Air Force education, training and experience and FAA eligibility requirements per Title 14, CFR Part 65.77. This FAA-approved program is a voluntary program which benefits the technician and the Air Force, with consideration to professional development, recruitment, retention, and transition. Completing this program, outlined in the program Qualification Training Package (QTP), will assist technicians in meeting FAA eligibility requirements and being better-prepared for the FAA exams. Three-Tier Program: The program is a three-tier training and experience program. These elements are required for program completion and are important for individual development, knowledge assessment, meeting FAA certification eligibility, and preparation for the FAA exams: Three Online Courses (02AF1-General, 02AF2-Airframe, & 02AF3-Powerplant). On the Job Training (OJT) Qualification Training Package(QTP). Documented evidence of 30 months practical experience in airframe and powerplant systems. Program Eligibility: Active duty, guard and reserve technicians who possess at least a 5-skill level in one of the following aircraft maintenance AFSCs are eligible to enroll: 2A0X1, 2A090, 2A2X1, 2A2X2, 2A2X3, 2A3X3, 2A3X4, 2A3X5, 2A3X7, 2A3X8, 2A390, 2A300, 2A5X1, 2A5X2, 2A5X3, 2A5X4, 2A590, 2A500, 2A6X1, 2A6X3, 2A6X4, 2A6X5, 2A6X6, 2A690, 2A691, 2A600 (except AGE), 2A7X1, 2A7X2, 2A7X3, 2A7X5, 2A790, 2A8X1, 2A8X2, 2A9X1, 2A9X2, and 2A9X3. -

The Propulsion of Sea Ships – in the Past, Present and Future –
The Propulsion of Sea Ships – in the Past, Present and Future – (Speech by Bernd Röder on the occasion of the VHT General Meeting on 11.12.2008) To prepare for today’s topic, more specifically for the topic: ship propulsion of the future, I did what every reasonable person would have done in my situation if he should have a look into the future – I dug out our VHT crystal ball. As you know, our crystal ball is a reliable and cost-efficient resource which we have been using for a long time with great suc- cess. Among other things, we’ve been using it to provide you with the repair costs or their duration or the probable claims experience of a policy, etc. or to create short-term damage statistics, as well. So, I asked the crystal ball: What does ship propulsion of the future look like? Every future and all statistics lie in the crystal ball I must, however, admit that what I saw there was somewhat irritating, and it led me to only the one conclusion – namely, that we’re taking a look into the very distant future at a time in which humanity has not only used up all of the oil reserves but also the entire wind. This time, we’re not really going to get any further with the crystal ball. Ship propulsion of the future or 'back to the roots'? But, sometimes it helps to have a look into the past to be able to say something about the fu- ture. According to the principle, draw a line connecting the distant past to today and simply extend it into the future. -

Rocket Nozzles: 75 Years of Research and Development
Sådhanå Ó (2021) 46:76 Indian Academy of Sciences https://doi.org/10.1007/s12046-021-01584-6Sadhana(0123456789().,-volV)FT3](0123456789().,-volV) Rocket nozzles: 75 years of research and development SHIVANG KHARE1 and UJJWAL K SAHA2,* 1 Department of Energy and Process Engineering, Norwegian University of Science and Technology, 7491 Trondheim, Norway 2 Department of Mechanical Engineering, Indian Institute of Technology Guwahati, Guwahati 781039, India e-mail: [email protected]; [email protected] MS received 28 August 2020; revised 20 December 2020; accepted 28 January 2021 Abstract. The nozzle forms a large segment of the rocket engine structure, and as a whole, the performance of a rocket largely depends upon its aerodynamic design. The principal parameters in this context are the shape of the nozzle contour and the nozzle area expansion ratio. A careful shaping of the nozzle contour can lead to a high gain in its performance. As a consequence of intensive research, the design and the shape of rocket nozzles have undergone a series of development over the last several decades. The notable among them are conical, bell, plug, expansion-deflection and dual bell nozzles, besides the recently developed multi nozzle grid. However, to the best of authors’ knowledge, no article has reviewed the entire group of nozzles in a systematic and comprehensive manner. This paper aims to review and bring all such development in one single frame. The article mainly focuses on the aerodynamic aspects of all the rocket nozzles developed till date and summarizes the major findings covering their design, development, utilization, benefits and limitations. -

Faa Ac 20-186
U.S. Department Advisory of Transportation Federal Aviation Administration Circular Subject: Airworthiness and Operational Date: 7/22/16 AC No: 20-186 Approval of Cockpit Voice Recorder Initiated by: AFS-300 Change: Systems 1 GENERAL INFORMATION. 1.1 Purpose. This advisory circular (AC) provides guidance for compliance with applicable regulations for the airworthiness and operational approval for required cockpit voice recorder (CVR) systems. Non-required installations may use this guidance when installing a CVR system as a voluntary safety enhancement. This AC is not mandatory and is not a regulation. This AC describes an acceptable means, but not the only means, to comply with Title 14 of the Code of Federal Regulations (14 CFR). However, if you use the means described in this AC, you must conform to it in totality for required installations. 1.2 Audience. We, the Federal Aviation Administration (FAA), wrote this AC for you, the aircraft manufacturers, CVR system manufacturers, aircraft operators, Maintenance Repair and Overhaul (MRO) Organizations and Supplemental Type Certificate (STC) applicants. 1.3 Cancellation. This AC cancels AC 25.1457-1A, Cockpit Voice Recorder Installations, dated November 3, 1969. 1.4 Related 14 CFR Parts. Sections of 14 CFR parts 23, 25, 27, 29, 91, 121, 125, 129, and 135 detail design substantiation and operational approval requirements directly applicable to the CVR system. See Appendix A, Flowcharts, to determine the applicable regulations for your aircraft and type of operation. Listed below are the specific 14 CFR sections applicable to this AC: • Part 23, § 23.1457, Cockpit Voice Recorders. • Part 23, § 23.1529, Instructions for Continued Airworthiness. -

Using an Autothrottle to Compare Techniques for Saving Fuel on A
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2010 Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft Rebecca Marie Johnson Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Electrical and Computer Engineering Commons Recommended Citation Johnson, Rebecca Marie, "Using an autothrottle ot compare techniques for saving fuel on a regional jet aircraft" (2010). Graduate Theses and Dissertations. 11358. https://lib.dr.iastate.edu/etd/11358 This Thesis is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Using an autothrottle to compare techniques for saving fuel on A regional jet aircraft by Rebecca Marie Johnson A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Electrical Engineering Program of Study Committee: Umesh Vaidya, Major Professor Qingze Zou Baskar Ganapathayasubramanian Iowa State University Ames, Iowa 2010 Copyright c Rebecca Marie Johnson, 2010. All rights reserved. ii DEDICATION I gratefully acknowledge everyone who contributed to the successful completion of this research. Bill Piche, my supervisor at Rockwell Collins, was supportive from day one, as were many of my colleagues. I also appreciate the efforts of my thesis committee, Drs. Umesh Vaidya, Qingze Zou, and Baskar Ganapathayasubramanian. I would also like to thank Dr. -

Propulsion and Flight Controls Integration for the Blended Wing Body Aircraft
Cranfield University Naveed ur Rahman Propulsion and Flight Controls Integration for the Blended Wing Body Aircraft School of Engineering PhD Thesis Cranfield University Department of Aerospace Sciences School of Engineering PhD Thesis Academic Year 2008-09 Naveed ur Rahman Propulsion and Flight Controls Integration for the Blended Wing Body Aircraft Supervisor: Dr James F. Whidborne May 2009 c Cranfield University 2009. All rights reserved. No part of this publication may be reproduced without the written permission of the copyright owner. Abstract The Blended Wing Body (BWB) aircraft offers a number of aerodynamic perfor- mance advantages when compared with conventional configurations. However, while operating at low airspeeds with nominal static margins, the controls on the BWB aircraft begin to saturate and the dynamic performance gets sluggish. Augmenta- tion of aerodynamic controls with the propulsion system is therefore considered in this research. Two aspects were of interest, namely thrust vectoring (TVC) and flap blowing. An aerodynamic model for the BWB aircraft with blown flap effects was formulated using empirical and vortex lattice methods and then integrated with a three spool Trent 500 turbofan engine model. The objectives were to estimate the effect of vectored thrust and engine bleed on its performance and to ascertain the corresponding gains in aerodynamic control effectiveness. To enhance control effectiveness, both internally and external blown flaps were sim- ulated. For a full span internally blown flap (IBF) arrangement using IPC flow, the amount of bleed mass flow and consequently the achievable blowing coefficients are limited. For IBF, the pitch control effectiveness was shown to increase by 18% at low airspeeds. -
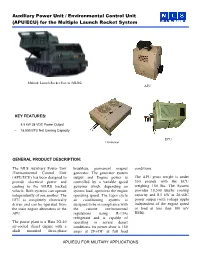
Auxiliary Power Unit / Environmental Control Unit (APU/ECU) for the Multiple Launch Rocket System
Auxiliary Power Unit / Environmental Control Unit (APU/ECU) for the Multiple Launch Rocket System Multiple Launch Rocket System (MLRS) APU KEY FEATURES: − 8.5 kW 28 VDC Power Output − 18,500 BTU Net Cooling Capacity ECU Condenser GENERAL PRODUCT DESCRIPTION: The MLS Auxiliary Power Unit brushless, permanent magnet conditions. /Environmental Control Unit generator. The generator system (APU/ECU) has been designed to output and Engine power is The APU gross weight is under provide electrical power and controlled by a variable speed 330 pounds with the ECU cooling to the MLRS tracked governor which, depending on weighing 150 lbs. The System vehicle. Both systems can operate system load, optimizes the engine provides 18,500 Btu/hr cooling independently of one another. The operating speed. The vapor cycle capacity and 8.5 kW at 28-vDC ECU is completely electrically air conditioning system is power output (with voltage ripple driven and can be operated from designed to be in compliance with independent of the engine speed the main engine alternators or the the current environmental or load at less than 100 mV APU. regulations using R-134a RMS). refrigerant and is capable of The power plant is a Hatz 2G-40 operating in severe desert air-cooled diesel engine with a conditions. Its power draw is 150 shaft mounted three-phase amps at 28-vDC at full load APU/ECU FOR MILITARY APPLICATIONS Auxiliary Power Unit / Environmental Control Unit (APU/ECU) for the Multiple Launch Rocket System Condenser Assembly APU Evaporator Assembly Overall APU/ECU Specifications: Exterior Dimensions (L x W x H)........................................…........... -

Basic Principles of Inertial Navigation
Basic Principles of Inertial Navigation Seminar on inertial navigation systems Tampere University of Technology 1 The five basic forms of navigation • Pilotage, which essentially relies on recognizing landmarks to know where you are. It is older than human kind. • Dead reckoning, which relies on knowing where you started from plus some form of heading information and some estimate of speed. • Celestial navigation, using time and the angles between local vertical and known celestial objects (e.g., sun, moon, or stars). • Radio navigation, which relies on radio‐frequency sources with known locations (including GNSS satellites, LORAN‐C, Omega, Tacan, US Army Position Location and Reporting System…) • Inertial navigation, which relies on knowing your initial position, velocity, and attitude and thereafter measuring your attitude rates and accelerations. The operation of inertial navigation systems (INS) depends upon Newton’s laws of classical mechanics. It is the only form of navigation that does not rely on external references. • These forms of navigation can be used in combination as well. The subject of our seminar is the fifth form of navigation – inertial navigation. 2 A few definitions • Inertia is the property of bodies to maintain constant translational and rotational velocity, unless disturbed by forces or torques, respectively (Newton’s first law of motion). • An inertial reference frame is a coordinate frame in which Newton’s laws of motion are valid. Inertial reference frames are neither rotating nor accelerating. • Inertial sensors measure rotation rate and acceleration, both of which are vector‐ valued variables. • Gyroscopes are sensors for measuring rotation: rate gyroscopes measure rotation rate, and integrating gyroscopes (also called whole‐angle gyroscopes) measure rotation angle. -

Lockheed Martin F-35 Lightning II Incorporates Many Significant Technological Enhancements Derived from Predecessor Development Programs
AIAA AVIATION Forum 10.2514/6.2018-3368 June 25-29, 2018, Atlanta, Georgia 2018 Aviation Technology, Integration, and Operations Conference F-35 Air Vehicle Technology Overview Chris Wiegand,1 Bruce A. Bullick,2 Jeffrey A. Catt,3 Jeffrey W. Hamstra,4 Greg P. Walker,5 and Steve Wurth6 Lockheed Martin Aeronautics Company, Fort Worth, TX, 76109, United States of America The Lockheed Martin F-35 Lightning II incorporates many significant technological enhancements derived from predecessor development programs. The X-35 concept demonstrator program incorporated some that were deemed critical to establish the technical credibility and readiness to enter the System Development and Demonstration (SDD) program. Key among them were the elements of the F-35B short takeoff and vertical landing propulsion system using the revolutionary shaft-driven LiftFan® system. However, due to X- 35 schedule constraints and technical risks, the incorporation of some technologies was deferred to the SDD program. This paper provides insight into several of the key air vehicle and propulsion systems technologies selected for incorporation into the F-35. It describes the transition from several highly successful technology development projects to their incorporation into the production aircraft. I. Introduction HE F-35 Lightning II is a true 5th Generation trivariant, multiservice air system. It provides outstanding fighter T class aerodynamic performance, supersonic speed, all-aspect stealth with weapons, and highly integrated and networked avionics. The F-35 aircraft -

FS/OAS A-24, Avionics Operational Test Standards for Contractually
Avionics Operational Test Standards FS/OAS A-24 Revision F September 10, 2018 The following standards apply to all contractually required/offered avionics equipment under US Forest Service contracts and Department of the Interior interagency fire contracts. Abbreviations and Selected Definitions are in Section 7. 1. Communications Systems Interference No squelch breaks or interference with other transceivers with 1 MHz separation. No transmit interlock functions for communications transceivers on fire aircraft. VHF-AM Transceiver Type TSO approved, selectable frequencies in 25 kHz increments, 760 channel minimum, operation from 118.000 to 136.975 MHz, 720 channel acceptable for DOI if contractually permitted Display Visible in direct sunlight Operation To and from service monitor Transmitter System modulation from 50% to 95% and clear, 5 watts minimum output power, frequency within 20 PPM (+2.46 kHz @ 122.925 MHz) (47 CFR 87.133) Receiver Squelch opens when receiving a signal from 50 Nautical Miles or (All Aircraft) greater when no other radios on the aircraft are transmitting. (See FS/OAS A-30 Radio Interference Test Procedures) Receiver Squelch opens when receiving a signal from 24 Nautical Miles or (Fire aircraft approved greater while other radios on the aircraft are transmitting with a for passengers or aircraft spacing of 2 MHz or greater. (See FS/OAS A-30 Radio Interference requiring two pilots) Test Procedures) 1 Aeronautical VHF-FM Transceiver (P25 required for Fire) Type Listed on Approved Radios list, P25 meets FS/AMD A-19