NDT Diagnosis of Drilled Shaft Foundations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
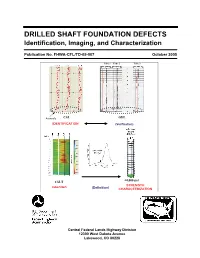
DRILLED SHAFT FOUNDATION DEFECTS Identification, Imaging, and Characterization
DRILLED SHAFT FOUNDATION DEFECTS Identification, Imaging, and Characterization Publication No. FHWA-CFL/TD-05-007 October 2005 Tube 1 Tube 2 Tube 3 Anomaly CSL GDL IDENTIFICATION (Verification) <4,000 psi CSLT STRENGTH IMAGING (Definition) CHARACTERIZATION Central Federal Lands Highway Division 12300 West Dakota Avenue Lakewood, CO 80228 Technical Report Documentation Page 1. Report No. 2. Government Accession No 3. Recipient’s Catalog No FHWA-CFL/TD-05-003 4. Title and Subtitle 5. Report Date Defects in Drilled Shaft Foundations: March 2005 Identification, Imaging, and Characterization 6. Performing Organization Code 7. Authors 8. Performing Organization Report No. Frank Jalinoos, MS Geophysics – Principal Investigator (PI); 3755FHA Natasa Mekic, MS Geophysics; Robert E. Grimm, Ph.D., Geophysics; Kanaan Hanna, MS, Mining Engineering 9. Performing Organization Name and Address 10. Work Unit No. Blackhawk, a division of ZAPATA ENGINEERING 301 Commercial Road, Suite B 11. Contract or Grant No. Golden, Colorado 80401 DTFH68-03-P-00116 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Federal Highway Administration Final Report, May 2003-March 2005 Central Federal Lands Highway Division 14. Sponsoring Agency Code 12300 West Dakota Avenue HFTS-16.4 Lakewood, Colorado 80228 15. Supplementary Notes COTR: Khamis Haramy, FHWA-CFLHD. Advisory Panel: Scott Anderson, FHWA-FLH and Roger Surdahl FHWA- CFLHD. This project was funded under the Federal Lands Highway Technology Deployment Initiatives and Partnership Program (TDIPP.) -

Mackays to Peka Peka Expressway ■ Tauroa Subdivision
NZ NZ GEOMECHA JUNE 2014 issue 87 N ICS NEWS ICS E N WS NZBulletin of the GEOMECHA New Zealand Geotechnical Society Inc. NICSISSN 0111–6851 ■ Ground Improvement Ground Mackays to ■ Tauroa Subdivision Tauroa Peka Peka Expressway ■ Mackays to Peka Expressway issue 87 JUNE 2014 NZ GEOMECHANICS NEWS EWS N 6851 ICSISSN 0111– GEOMECHA N NZBulletin of the New Zealand Geotechnical Society Inc. ■ Ground Improvement Mackays to ■ Tauroa Subdivision ■ Peka Peka NZGS Life Member and IPENZ Awards Expressway ■ Mackays to Peka Peka Expressway ■ NZGS Life Member and IPENZ Awards SEARCH NZGS at yOUR tauroa subdivision ground improvement App nzgs life member and ipenz awards JUNE STORE 2014 Back issues now free online check out www.nzgs.org issue 87 30/05/14 12:04 pm NZGS TAUROANZGS_june14cv4.indd 1 SUBDIVISION june GROUND IMPROVEMENT 2014 issue 87 NZGS LIFE MEMBER AND IPENZ AWARDS NZGS Back issues now free online check out www.nzgs.org Our multidisciplinary operation specialises We’re proud to be the sole distributor in the fields of ground anchoring, soil in New Zealand for SAMWOO Anchor nailing, drilling, post-tensioning and Technology, BluGeo GRP Powerthread K60 RETAINING YOUR BUSINESS grouting. The combination of capability Bar, Tighter (Kite) Earth Anchors and Grout and depth of technical expertise makes Grippa Grout Sock (Australasia). us a market leader and supports our IS OUR BUSINESS. reputation for providing value engineered solutions to our customers. Over more than 40 years, Grouting Services has delivered We’re experts in: some of New Zealand’s most significant Ground Anchoring, Soil Nailing, Micro-Piling and Post-Tensioning contracts. -

GEO STRATA MARCH/APRIL 2010.Indd
Plus… Geo-Strata: A Decade of Delivery March/April 2010 Levees At Risk We build the barriers that keep clean water clean. Grout Curtain, McCook Reservoir Stage I Chicago, IL The support you need to protect your vital resources. The McCook Reservoir will store the wastewater overflow that would otherwise threaten the City of Chicago’s drinking water. To create a seal in the fractured limestone around the reservoir, Nicholson constructed a grout curtain using its computerized GROUT I.T. system which measures, records and graphically displays grouting parameters in real time. At Nicholson Construction Company, we specialize in deep foundations, earth retention, ground treatment and ground improvement techniques that help you achieve your project 1-800-388-2340 goals. Nicholson...the support you need. nicholsonconstruction.com DEEP FOUNDATIONS EARTH RETENTION GROUND TREATMENT GROUND IMPROVEMENT Micropiles • Caissons • Driven/Drilled Piles • Augercast Piles Tiebacks • Excavation and Drainage • Sheet Piling Rock / Soil Nailing • Grouting • Bridges and Complex Structures Concrete Foundations • Lock and Dam Construction Steel Erection • Demolition/Brownfields Redevelopment 1000 John Roebling Way • Saxonburg, PA 16056 Office: 724-443-1533 • Fax: 724-443-8733 www.braymanconstruction.com Features May/June 2008 January/February 2007 VOLUME 14 l ISSUE 2 Geo-Strata 19 Geo-Strata: A Decade of Delivery By James L. Withiam, Ph.D., P.E., D.GE, M.ASCE and Linda R. Bayer, IOM FIGURE 3 Hurricanes: Geotechnical Condition Assessments Lessons Learned Excavation sites based EM3 anomalies. The broad low-weak 24 What’s In Your Levee? 19 anomalies are associated with beaver dens, and the high- By Mara Johnson, Ph.D., and Louise Pellerin, Ph.D. -

Shofana Elfa Hidayah Nim 161910301059
DigitalDigital RepositoryRepository UniversitasUniversitas JemberJember EVALUASI DAYA DUKUNG PONDASI BORED PILE DENGAN STATIC LOADING TEST DAN CROSSHOLE SONIC LOGGING (CSL) PADA PROYEK TRANS ICON SURABAYA SKRIPSI OLEH: SHOFANA ELFA HIDAYAH NIM 161910301059 PROGRAM STUDI STRATA 1 TEKNIK SIPIL JURUSAN TEKNIK SIPIL FAKULTAS TEKNIK UNIVERSITAS JEMBER 2020 i DigitalDigital RepositoryRepository UniversitasUniversitas JemberJember EVALUASI DAYA DUKUNG PONDASI BORED PILE DENGAN STATIC LOADING TEST DAN CROSSHOLE SONIC LOGGING (CSL) PADA PROYEK TRANS ICON SURABAYA SKRIPSI Diajukan guna melengkapi tugas akhir dan memenuhi salah satu syarat untuk menyelesaikan Program Studi Strata 1 Teknik Sipil dan mencapai gelar Sarjana Teknik Oleh : SHOFANA ELFA HIDAYAH NIM 161910301059 PROGRAM STUDI STRATA 1 TEKNIK SIPIL JURUSAN TEKNIK SIPIL FAKULTAS TEKNIK UNIVERSITAS JEMBER 2020 ii DigitalDigital RepositoryRepository UniversitasUniversitas JemberJember PERSEMBAHAN Skripsi ini saya persembahkan untuk : 1. Ayah dan Alm. Ibu saya yang telah memberi doa, semangat, dan materi yang tiada henti sejak saya lahir hingga saat ini. 2. Adik saya, Alfath Luthfiansyah Abror yang menjadi sumber motivasi saya untuk berbuat lebih banyak lagi sehingga dapat memudahkan jalannya kelak di masa yang akan datang. 3. Mas Riantri Hidayat yang telah menemani dan selalu membantu saya saat proses pengerjaan tugas akhir ini. Semoga selalu dipermudah jalanmu kedepannya dan semua yang menjadi cita –cita kita dapat terwujud. 4. Dosen pembimbing saya, Ibu Indra Nurtjahjaningtyas, S.T., M.T, dan Bapak Luthfi Amri Wicaksono, S.T., M.T yang selalu membimbing serta mengarahkan saya dalam pengerjaan tugas akhir ini. 5. Dosen Pembimbing Akademik saya, Bapak Dr. Gusfan Halik M.T yang telah memberikan masukan – masukan dari semester 1 hingga saat ini. 6. Sahabat –sahabat serta keluarga besar saya, Surgacorp, Biji Besi 2016, dan semua yang tidak bisa saya sebutkan satu persatu terimakasih sudah memberikan semangat, ilmu, waktu, dan doa. -

October 11, 2016 Order No.: K19 Project
DEPARTMENT OF TRANSPORTATION 1401 EAST BROAD STREET RICHMOND, VIRGINIA 23219-2000 Charles A. Kilpatrick, P.E. Commissioner October 11, 2016 Order No.: K19 Project: (NFO)8102-029-065,B627,B628,B629,C501 FHWA: STP-5A01 (717) District: Northern Virginia County: Fairfax Route: Various Bids: October 26, 2016 To Holders of Bid Proposals: Please make the following changes in your copy of the bid proposal for the captioned project: BID PROPOSAL Substitute Form C21B as it has been revised. Substitute Form C21C as it has been revised. Substitute Form C-7 as it has been revised to Sheet 1 of 33. Substitute pages 2 through 32 as those pages have been revised and due to renumbering. Add page 33 as that page has been added and due to renumbering. Substitute DMI as it has been revised. Substitute page 2 of the Table of Contents for Provisions as Special Provision SEC. 406- Reinforcing Steel Dated: R-7-12-16_(SP) has been deleted. Special Provision Section 605 Planting Dated: 8-20-15 has been deleted. Special Provision Section 703 - Traffic Signals Dated: 2-11-16 has been deleted. Special Provision Drilled Shafts Dated: 3-9-16 has been deleted. Special Provision Copied Note Sec. 505.03-Procedures (Guardrail & Attenuator ID) Dated: R-7- 12-16_(SPCN) has been added. Special Provision Copied Note Sec. 512-Maintaining Traffic (ID Stamp/Engrave G’rail/Atten) Dated: R-7-12-16_(SPCN) has been added. Special Provision Copied Note Section 512.03 (j).Traffic Signals Dated: 10-12-16 (SPCN) has been added. Special Provision Copied Note Section 700.06 – Measurement and Payment Dated: 9-29-16 (SPCN) has been added. -

FHWA Ground Modificaion Lesson 0
DRILLED SHAFT CONSTRUCTION POLICY CHANGES 50 YEARS OF FHWA GEOTECH!! Formed in 1968 as a small group of experts placed in regional offices to address a number of slide related issues during interstate construction Rock Slides Degradable Shales Failing Soil Embankments Focus during early years primarily on earthworks, and “expertise” among that group was variable Primary role –Technical assistance 50 YEARS OF FHWA GEOTECH!! In the mid-1980’s, the geotechnical group was moved from construction and maintenance division to the bridge division Geotechnical function evolved to support different highway design functions Coincided with early significant research efforts, including: Allowable stress on piles Group behavior Static analysis really didn’t exist in practice to date, and structural engineers performed most foundation design SIGNIFICANT IMPACTS ON GEOTECHNICAL PRACTICE Dynamic Testing for Driven Piles Introduction of MSE to the United States Widespread Use of Ground Improvement Techniques Guidance Manual and Training Development Geotechnical Monitoring and Risk Management Impact of Geosynthetics Evolution of Design Platforms Software Development Innovative Contracting for Project Delivery FHWA GEOTECHNICAL PROGRAM Policy & Guidance Training & Research Technical Deployment FHWA STRATEGIC PLANNING Strategic Planning/Roadmap In alignment with Agency Strategic Planning Roadmap informs the annual Geotechnical Spending Plan for FHWA Roadmap is reviewed and updated on an annual basis Roadmap is informed through feedback -

1 SAMPLE SPECIFICATION for CROSSHOLE SONIC LOGGING
SAMPLE SPECIFICATION for CROSSHOLE SONIC LOGGING (CSL) September 2015 Note: This sample specification contains recommended or typical quantities in parenthesis, in the format (quantity); the specifying Engineers can adapt these quantities for their particular construction projects. Contractual items are minimized since each agency has its own preferences and procedures. Method overview of Crosshole Sonic Logging (CSL). By sending ultrasonic pulses through concrete from one probe to another (probes located in parallel tubes), the CSL procedure inspects the drilled shaft structural integrity of the concrete between the tubes, and extent and location of defects, if any. Both the time between pulse generation and signal reception (“First Arrival Time” or “FAT”) and the strength of the received signal give a relative measure of the quality of concrete between transmitter and receiver. Dividing the distance between transmitter and receiver by the FAT value yields the approximate concrete wave speed which also is a relative indicator of concrete quality. For equidistant tubes, uniform concrete between the test tubes yields consistent arrival times with reasonable pulse wave speed and good signal strengths. Non-uniformities such as contaminated or soft concrete, honeycombing, voids and inclusions exhibit delayed arrival times with reduced signal strength. CSL procedures are standardized by ASTM 6760, Standard Test Method for Integrity Testing of Concrete Deep Foundations by Ultrasonic Crosshole Testing. Standards are also available in many other countries. (a) Personnel requirements for CSL. (1) Qualifications of CSL Consultant. The CSL Consultant shall have a licensed professional engineer supervising the testing and interpretation of results. The CSL Consultant shall be an independent testing agency with at least (3) years experience in CSL testing. -

Design and Analysis of Laterally Loaded Deep Foundations
This document downloaded from vulcanhammer.net vulcanhammer.info Chet Aero Marine Don’t forget to visit our companion site http://www.vulcanhammer.org Use subject to the terms and conditions of the respective websites. Design, Analysis, and Testing of Laterally Loaded Deep Foundations that Support Transportation Facilities FHWA GEC 009 April 2018 Sponsored by Federal Highway Administration Office of Infrastructure FHWA-HIF-18-031 {cover back blank} Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. FHWA-HIF-18-031 4. Title and Subtitle 5. Report Date Geotechnical Engineering Circular: Design, Analysis, and Testing of April 2018 Laterally Loaded Deep Foundations that Support Transportation Facilities 6. Performing Organization Code 7. Principal Investigator(s): 8. Performing Organization Report James Parkes, P.E., Raymond Castelli, P.E., Brian Zelenko, P.E., Robert O’Connor, P.E., Matteo Montesi, P.E, and Elizabeth Godfrey, P.E. 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) WSP USA, Inc. 1015 Half Street, SE, Suite 650 11. Contract or Grant No. Washington, DC 20003 DTFH6114D00047-5012 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Federal Highway Administration Office of Bridge Technology 1200 New Jersey Avenue, SE 14. Sponsoring Agency Code Washington, DC 20005 15. Supplementary Notes FHWA COR - Silas Nichols FHWA Task Order Manager - Khalid Mohamed 16. Abstract This Geotechnical Engineering Circular (GEC) is intended to provide recommended guidance for the LRFD design, analysis, and testing of laterally loaded deep foundations for transportation facilities. This document applies to deep foundation elements such as driven piles, drilled shafts, micropiles, and continuous flight auger (CFA) piles that are used to resist lateral loads, often in combination with axial loads, for new construction, rehabilitation, or reconstruction of transportation facilities. -

Crosshole Sonic Logging
Crosshole Sonic Logging Unearthed Excavated Shaft Crosshole Sonic Logging Test Firm Background Crosshole Sonic Logging Established in San Diego in 1986, Ninyo & Moore is one of the largest engineering firms Crosshole Sonic Logging (CSL) provides a non-destructive method for Quality specializing in Geotechnical Engineering, Assurance (QA) testing of drilled shaft foundations immediately following construction. Environmental Engineering and Materials The CSL method involves transmitting ultrasonic waves through concrete and Testing and Inspection Services. Engineering other materials, including slurry, rock, grout, water-saturated media, or cemented News Record (ENR) recognizes the firm as radioactive wastes. Drilled shafts or caissons are often used to construct special one of the Top 500 Design Firms in the United types of foundations to support critical structures. Some states, such as California States. and New Mexico, specify CSL to QA test the drilled shaft. In the United States, the testing standard is ASTM Standard D6760 and any additional project specifications. Ninyo & Moore has fully equipped and certified in-house testing laboratories that offer CSL testing is used to find defects in the concrete foundation structure. Generally, the full-service field and laboratory services for CSL test is performed during the construction phase or immediately postconstruction geotechnical design, and soil and materials to evaluate whether the shaft has defects, and to report the nature of detected testing projects. defects so that project structural engineers can evaluate whether the structure will perform as intended, and whether remedial steps are needed before the foundation Professional Staff is approved for use. Ninyo & Moore’s staff of 500 certified and CSL is typically used to not only evaluate integrity, but also the possible presence registered professionals includes: and extent of voids and low density or “soft” areas, in a newly constructed drilled • Geotechnical engineers shaft foundation. -

Pile Testing Brochure PDF.Cdr
RailwayPilemonitoringMONITORINGPILE MONITORING SOLUTIONStesting FOR & TESTING THE RAIL SPECIALISTS INDUSTRY Strainstall Pile Testing and Monitoring Specialists www.strainstall.com expertise Bi-Directional Static Load Testing (BDSLT) structural beams. Ground cconditionsondit Time Efficiency Automated Data Acquisition and The Bi-Directional Static Load Test is a well-known static load testing method that uses a time and space and not the test method determine It only takes a few days of Logging saving approach by loading the pile resistance from the mid-pile of near-toe position instead of top loading. the weight of load that can be used. preparation for the installation of the Strainstall’s pileSENTINEL package The BDSLT has gained world wide acceptance for larger diameter (>800mm) cast in-situ concrete piles. pre-manufactured bi-directional is used for automated and The incorporation of strain gauges hydraulic jack(s). continuous monitoring of static Widely adopted in the US, Europe Since the upward skin friction and By using multiple bi-direction jacks within the pile helps to determine loads. The advanced electronic and Asia, engineers and piling end-bearing are measured on a single horizontal plane, the the distribution of load throughout Precision Testing recording system is configured to contractors are increasingly turning separately, there is no guesswork available test capacity can be the shaft length, and the use of Provides engineers with separate provide real-time data recording at data on the end-bearing and friction to the Bi-Directional Static Load as to how much load was carried increased to more than 10,000 embedment strain gauges can defined intervals (that can be as resistance of the shaft Test method due to its by each section. -

Single-Hole Sonic Logging
i Single-hole sonic logging A study of possibilities and limitations of detecting flaws in piles MARTIN PALM Master of Science Thesis Stockholm, Sweden 2012 Single-hole sonic logging A study of possibilities and limitations of detecting flaws in piles Martin Palm July 2012 TRITA-BKN. Master Thesis 362, 2012 ISSN 1103-4297 ISRN KTH/BKN/EX-362-SE ©Martin Palm, 2012 Royal Institute of Technology (KTH) Department of Civil and Architectural Engineering Stockholm, Sweden, 2012 Preface This master thesis deals with pile integrity testing in general and single-hole sonic logging of bored piles in particular. It was initiated by Deltares in Delft, the Netherlands. It was carried out during a period of six months in the office of Deltares which is an independent research institute in the field of water, subsurface and infrastructure. This report is the written record of a master thesis project at the KTH Department of Civil and Architectural Engineering as a part of the fulfillment of the requirements for a Master degree in Civil Engineering. I would like to thank my supervisor at Deltares Paul Holscher for his support and guidance and Rodriaan Spruit, PhD candidate, TU Delft and Gemeentewerken Rotterdam for kindly giving me laboratory measurement data. I also want to express my gratitude to all the coworkers at Deltares who contributed to this thesis by answering my questions. I would also like to thank my supervisor at KTH, Raid Karoumi, for his kindly advices and for handling a lot of my paper work when I was stuck in the Netherlands. Paul Holscher (Deltares) and Raid Karoumi (Kungliga Tekniska högskolan, KTH) were supervisors. -
Request for Proposals for Industry Review
Request for Proposals for Industry Review Emergency Bridge Replacement 2020-2 Design-Build Project Project ID P040306 Aiken County January 27, 2021 Emergency Bridge Replacement 2020-2 Aiken County, South Carolina A Design-Build Project Project ID P040306 INDEX Request for Proposals Instructions Attachment A: Agreement Exhibit 1. Cost Proposal Bid Form Exhibit 2. Schedule of Values Exhibit 3. Scope of Work Exhibit 4. Project Design Criteria 4a. Roadway Design Criteria 4b. Structures Design Criteria 4c. Pavement Design Criteria 4d. Traffic Design Criteria Part 1 – Signing and Pavement Markings Part 2 – Work Zone Traffic Control 4e. Hydraulic Design Criteria 4f. Geotechnical Design Criteria 4z. Project Design Deliverables Exhibit 5. Special Provisions and Contract Requirements Exhibit 6. Environmental Criteria Exhibit 7. Utility Criteria Attachment B: Supplemental Project Design Criteria Project Information Package Project ID P040306 SCDOT | Design-Build Project Page 1 Emergency Bridge Replacement 2020-2 Aiken County, South Carolina REQUEST FOR PROPOSALS INSTRUCTIONS TABLE OF CONTENTS PURPOSE OF REQUEST FOR PROPOSALS ........................................................................................ 1 PROJECT OVERVIEW ...................................................................................................................... 1 2.1 PROJECT DESCRIPTION .......................................................................................................................... 1 2.2 PROJECT INFORMATION ........................................................................................................................