Anguilliform Locomotion in Needlefish
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fish Locomotion: Recent Advances and New Directions
MA07CH22-Lauder ARI 6 November 2014 13:40 Fish Locomotion: Recent Advances and New Directions George V. Lauder Museum of Comparative Zoology, Harvard University, Cambridge, Massachusetts 02138; email: [email protected] Annu. Rev. Mar. Sci. 2015. 7:521–45 Keywords First published online as a Review in Advance on swimming, kinematics, hydrodynamics, robotics September 19, 2014 The Annual Review of Marine Science is online at Abstract marine.annualreviews.org Access provided by Harvard University on 01/07/15. For personal use only. Research on fish locomotion has expanded greatly in recent years as new This article’s doi: approaches have been brought to bear on a classical field of study. Detailed Annu. Rev. Marine. Sci. 2015.7:521-545. Downloaded from www.annualreviews.org 10.1146/annurev-marine-010814-015614 analyses of patterns of body and fin motion and the effects of these move- Copyright c 2015 by Annual Reviews. ments on water flow patterns have helped scientists understand the causes All rights reserved and effects of hydrodynamic patterns produced by swimming fish. Recent developments include the study of the center-of-mass motion of swimming fish and the use of volumetric imaging systems that allow three-dimensional instantaneous snapshots of wake flow patterns. The large numbers of swim- ming fish in the oceans and the vorticity present in fin and body wakes sup- port the hypothesis that fish contribute significantly to the mixing of ocean waters. New developments in fish robotics have enhanced understanding of the physical principles underlying aquatic propulsion and allowed intriguing biological features, such as the structure of shark skin, to be studied in detail. -

Median Fin Patterning in Bony Fish: Caspase-3 Role in Fin Fold Reabsorption
Eastern Illinois University The Keep Undergraduate Honors Theses Honors College 2017 Median Fin Patterning in Bony Fish: Caspase-3 Role in Fin Fold Reabsorption Kaitlyn Ann Hammock Follow this and additional works at: https://thekeep.eiu.edu/honors_theses Part of the Animal Sciences Commons Median fin patterning in bony fish: caspase-3 role in fin fold reabsorption BY Kaitlyn Ann Hammock UNDERGRADUATE THESIS Submitted in partial fulfillment of the requirement for obtaining UNDERGRADUATE DEPARTMENTAL HONORS Department of Biological Sciences along with the HonorsCollege at EASTERN ILLINOIS UNIVERSITY Charleston, Illinois 2017 I hereby recommend this thesis to be accepted as fulfilling the thesis requirement for obtaining Undergraduate Departmental Honors Date '.fHESIS ADVI 1 Date HONORSCOORDmATOR f C I//' ' / ·12 1' J Date, , DEPARTME TCHAIR Abstract Fish larvae develop a fin fold that will later be replaced by the median fins. I hypothesize that finfold reabsorption is part of the initial patterning of the median fins,and that caspase-3, an apoptosis marker, will be expressed in the fin fold during reabsorption. I analyzed time series of larvae in the first20-days post hatch (dph) to determine timing of median findevelopment in a basal bony fish- sturgeon- and in zebrafish, a derived bony fish. I am expecting the general activation pathway to be conserved in both fishesbut, the timing and location of cell death to differ.The dorsal fin foldis the firstto be reabsorbed in the sturgeon starting at 2 dph and rays formed at 6dph. This was closely followed by the anal finat 3 dph, rays at 9 dph and only later, at 6dph, does the caudal fin start forming and rays at 14 dph. -

Belonidae Bonaparte 1832 Needlefishes
ISSN 1545-150X California Academy of Sciences A N N O T A T E D C H E C K L I S T S O F F I S H E S Number 16 September 2003 Family Belonidae Bonaparte 1832 needlefishes By Bruce B. Collette National Marine Fisheries Service Systematics Laboratory National Museum of Natural History, Washington, DC 20560–0153, U.S.A. email: [email protected] Needlefishes are a relatively small family of beloniform fishes (Rosen and Parenti 1981 [ref. 5538], Collette et al. 1984 [ref. 11422]) that differ from other members of the order in having both the upper and the lower jaws extended into long beaks filled with sharp teeth (except in the neotenic Belonion), the third pair of upper pharyngeal bones separate, scales on the body relatively small, and no finlets following the dorsal and anal fins. The nostrils lie in a pit anterior to the eyes. There are no spines in the fins. The dorsal fin, with 11–43 rays, and anal fin, with 12–39 rays, are posterior in position; the pelvic fins, with 6 soft rays, are located in an abdominal position; and the pectoral fins are short, with 5–15 rays. The lateral line runs down from the pectoral fin origin and then along the ventral margin of the body. The scales are small, cycloid, and easily detached. Precaudal vertebrae number 33–65, caudal vertebrae 19–41, and total verte- brae 52–97. Some freshwater needlefishes reach only 6 or 7 cm (2.5 or 2.75 in) in total length while some marine species may attain 2 m (6.5 ft). -

Amphibious Fishes: Terrestrial Locomotion, Performance, Orientation, and Behaviors from an Applied Perspective by Noah R
AMPHIBIOUS FISHES: TERRESTRIAL LOCOMOTION, PERFORMANCE, ORIENTATION, AND BEHAVIORS FROM AN APPLIED PERSPECTIVE BY NOAH R. BRESSMAN A Dissertation Submitted to the Graduate Faculty of WAKE FOREST UNIVESITY GRADUATE SCHOOL OF ARTS AND SCIENCES in Partial Fulfillment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY Biology May 2020 Winston-Salem, North Carolina Approved By: Miriam A. Ashley-Ross, Ph.D., Advisor Alice C. Gibb, Ph.D., Chair T. Michael Anderson, Ph.D. Bill Conner, Ph.D. Glen Mars, Ph.D. ACKNOWLEDGEMENTS I would like to thank my adviser Dr. Miriam Ashley-Ross for mentoring me and providing all of her support throughout my doctoral program. I would also like to thank the rest of my committee – Drs. T. Michael Anderson, Glen Marrs, Alice Gibb, and Bill Conner – for teaching me new skills and supporting me along the way. My dissertation research would not have been possible without the help of my collaborators, Drs. Jeff Hill, Joe Love, and Ben Perlman. Additionally, I am very appreciative of the many undergraduate and high school students who helped me collect and analyze data – Mark Simms, Tyler King, Caroline Horne, John Crumpler, John S. Gallen, Emily Lovern, Samir Lalani, Rob Sheppard, Cal Morrison, Imoh Udoh, Harrison McCamy, Laura Miron, and Amaya Pitts. I would like to thank my fellow graduate student labmates – Francesca Giammona, Dan O’Donnell, MC Regan, and Christine Vega – for their support and helping me flesh out ideas. I am appreciative of Dr. Ryan Earley, Dr. Bruce Turner, Allison Durland Donahou, Mary Groves, Tim Groves, Maryland Department of Natural Resources, UF Tropical Aquaculture Lab for providing fish, animal care, and lab space throughout my doctoral research. -

Bony Fish Guide
This guide will help you to complete the Bony Fish Observation Worksheet. Bony Fish Guide Fish (n.) An ectothermic (cold-blooded) vertebrate (with a backbone) aquatic (lives in water) animal that moves with the help of fins (limbs with no fingers or toes) and breathes with gills. This definition might seem very broad, and that is because fish are one of the most diverse groups of animals on the planet—there are a lot of fish in the sea (not to mention rivers, lakes and ponds). In fact, scientists count at least 32,000 species of fish—more than any other type of vertebrate. Fish are split into three broad classes: Jawless Fish Cartilaginous Fish Bony Fish (hagfish, lampreys, etc.) (sharks, rays, skates, etc.) (all other fish) This guide will focus on the Bony Fish. There are at least 28,000 species of bony fish, and they are found in almost every naturally occurring body of water on the planet. Bony fish range in size: • Largest: ocean sunfish (Mola mola), 11 feet, over 5,000 pounds • Smallest: dwarf pygmy goby (Pandaka pygmaea), ½ inch, a fraction of an ounce (This image is life size.) The following guide will help you learn more about the bony fish you can find throughout the New England Aquarium. Much of the guide is keyed to the Giant Ocean Tank, but can be applied to many kinds of fish. Even if you know nothing about fish, you can quickly learn a few things: The shape of a fish’s body, the position of its mouth and the shape of its tail can give you many clues as to its behavior and adaptations. -

BREAK-OUT SESSIONS at a GLANCE THURSDAY, 24 JULY, Afternoon Sessions
2008 Joint Meeting (JMIH), Montreal, Canada BREAK-OUT SESSIONS AT A GLANCE THURSDAY, 24 JULY, Afternoon Sessions ROOM Salon Drummond West & Center Salons A&B Salons 6&7 SESSION/ Fish Ecology I Herp Behavior Fish Morphology & Histology I SYMPOSIUM MODERATOR J Knouft M Whiting M Dean 1:30 PM M Whiting M Dean Can She-male Flat Lizards (Platysaurus broadleyi) use Micro-mechanics and material properties of the Multiple Signals to Deceive Male Rivals? tessellated skeleton of cartilaginous fishes 1:45 PM J Webb M Paulissen K Conway - GDM The interopercular-preopercular articulation: a novel Is prey detection mediated by the widened lateral line Variation In Spatial Learning Within And Between Two feature suggesting a close relationship between canal system in the Lake Malawi cichlid, Aulonocara Species Of North American Skinks Psilorhynchus and labeonin cyprinids (Ostariophysi: hansbaenchi? Cypriniformes) 2:00 PM I Dolinsek M Venesky D Adriaens Homing And Straying Following Experimental Effects of Batrachochytrium dendrobatidis infections on Biting for Blood: A Novel Jaw Mechanism in Translocation Of PIT Tagged Fishes larval foraging performance Haematophagous Candirú Catfish (Vandellia sp.) 2:15 PM Z Benzaken K Summers J Bagley - GDM Taxonomy, population genetics, and body shape The tale of the two shoals: How individual experience A Key Ecological Trait Drives the Evolution of Monogamy variation of Alabama spotted bass Micropterus influences shoal behaviour in a Peruvian Poison Frog punctulatus henshalli 2:30 PM M Pyron K Parris L Chapman -

Current Knowledge on the European Mudminnow, Umbra Krameri Walbaum, 1792 (Pisces: Umbridae)
ZOBODAT - www.zobodat.at Zoologisch-Botanische Datenbank/Zoological-Botanical Database Digitale Literatur/Digital Literature Zeitschrift/Journal: Annalen des Naturhistorischen Museums in Wien Jahr/Year: 1995 Band/Volume: 97B Autor(en)/Author(s): Wanzenböck Josef Artikel/Article: Current knowledge on the European mudminnow, Umbra krameri Walbaum, 1792 (Pisces: Umbridae). 439-449 ©Naturhistorisches Museum Wien, download unter www.biologiezentrum.at Ann. Naturhist. Mus. Wien 97 B 439 - 449 Wien, November 1995 Current knowledge on the European mudminnow, Umbra krameri WALBAUM, 1792 (Pisces: Umbridae) J. Wanzenböck* Abstract The present paper summarizes the current knowledge on the European mudminnow {Umbra krameri WALBAUM, 1792) with respect to systematics, taxonomy, and ecology. Key words: Umbridae, Umbra krameri, systematics, taxonomy, ecology. Zusammenfassung Die vorliegende Arbeit faßt den derzeitigen Wissensstand über den Europäischen Hundsfisch {Umbra kra- meri WALBAUM, 1792) unter Berücksichtigung systematischer, taxonomischer und ökologischer Aspekte zusammen. Names, taxonomy, and systematics Scientific name: Umbra krameri WALBAUM, 1792 Common names: Based on BLANC & al. (1971) and LINDBERG & HEARD (1972). Names suggested by the author are given at first, those marked with an asterix (*) are given in BLANC & al. (1971). German: Europäischer Hundsfisch, Hundsfisch*, Ungarischer Hundsfisch Hungarian: Lâpi póc* Czech: Tmavec hnëdy*, Blatnâk tmavy Slovak: Blatniak* Russian: Evdoshka, Umbra* Ukrainian: Boboshka (Dniestr), Evdoshka, Lezheboka -
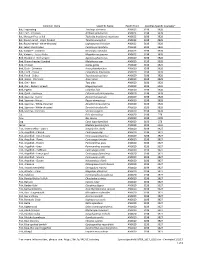
*For More Information, Please See
Common Name Scientific Name Health Point Specifies-Specific Course(s)* Bat, Frog-eating Trachops cirrhosus AN0023 3198 3928 Bat, Fruit - Jamaican Artibeus jamaicensis AN0023 3198 3928 Bat, Mexican Free-tailed Tadarida brasiliensis mexicana AN0023 3198 3928 Bat, Round-eared - stripe-headed Tonatia saurophila AN0023 3198 3928 Bat, Round-eared - white-throated Lophostoma silvicolum AN0023 3198 3928 Bat, Seba's short-tailed Carollia perspicillata AN0023 3198 3928 Bat, Vampire - Common Desmodus rotundus AN0023 3198 3928 Bat, Vampire - Lesser False Megaderma spasma AN0023 3198 3928 Bird, Blackbird - Red-winged Agelaius phoeniceus AN0020 3198 3928 Bird, Brown-headed Cowbird Molothurus ater AN0020 3198 3928 Bird, Chicken Gallus gallus AN0020 3198 3529 Bird, Duck - Domestic Anas platyrhynchos AN0020 3198 3928 Bird, Finch - House Carpodacus mexicanus AN0020 3198 3928 Bird, Finch - Zebra Taeniopygia guttata AN0020 3198 3928 Bird, Goose - Domestic Anser anser AN0020 3198 3928 Bird, Owl - Barn Tyto alba AN0020 3198 3928 Bird, Owl - Eastern Screech Megascops asio AN0020 3198 3928 Bird, Pigeon Columba livia AN0020 3198 3928 Bird, Quail - Japanese Coturnix coturnix japonica AN0020 3198 3928 Bird, Sparrow - Harris' Zonotrichia querula AN0020 3198 3928 Bird, Sparrow - House Passer domesticus AN0020 3198 3928 Bird, Sparrow - White-crowned Zonotrichia leucophrys AN0020 3198 3928 Bird, Sparrow - White-throated Zonotrichia albicollis AN0020 3198 3928 Bird, Starling - Common Sturnus vulgaris AN0020 3198 3928 Cat Felis domesticus AN0020 3198 279 Cow Bos taurus -
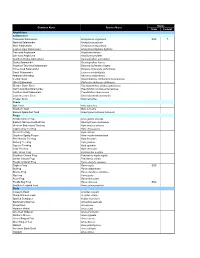
St. Joseph Bay Native Species List
Status Common Name Species Name State Federal Amphibians Salamanders Flatwoods Salamander Ambystoma cingulatum SSC T Marbled Salamander Ambystoma opacum Mole Salamander Ambystoma talpoideum Eastern Tiger Salamander Ambystoma tigrinum tigrinum Two-toed Amphiuma Amphiuma means One-toed Amphiuma Amphiuma pholeter Southern Dusky Salamander Desmognathus auriculatus Dusky Salamander Desmognathus fuscus Southern Two-lined Salamander Eurycea bislineata cirrigera Three-lined Salamander Eurycea longicauda guttolineata Dwarf Salamander Eurycea quadridigitata Alabama Waterdog Necturus alabamensis Central Newt Notophthalmus viridescens louisianensis Slimy Salamander Plethodon glutinosus glutinosus Slender Dwarf Siren Pseudobranchus striatus spheniscus Gulf Coast Mud Salamander Pseudotriton montanus flavissimus Southern Red Salamander Pseudotriton ruber vioscai Eastern Lesser Siren Siren intermedia intermedia Greater Siren Siren lacertina Toads Oak Toad Bufo quercicus Southern Toad Bufo terrestris Eastern Spadefoot Toad Scaphiopus holbrooki holbrooki Frogs Florida Cricket Frog Acris gryllus dorsalis Eastern Narrow-mouthed Frog Gastrophryne carolinensis Western Bird-voiced Treefrog Hyla avivoca avivoca Cope's Gray Treefrog Hyla chrysoscelis Green Treefrog Hyla cinerea Southern Spring Peeper Hyla crucifer bartramiana Pine Woods Treefrog Hyla femoralis Barking Treefrog Hyla gratiosa Squirrel Treefrog Hyla squirella Gray Treefrog Hyla versicolor Little Grass Frog Limnaoedus ocularis Southern Chorus Frog Pseudacris nigrita nigrita Ornate Chorus Frog Pseudacris -

Three Gray Classics on the Biomechanics of Animal Movement
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Harvard University - DASH Three Gray Classics on the Biomechanics of Animal Movement The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation Lauder, G. V., Eric Tytell. 2004. Three Gray Classics on the Biomechanics of Animal Movement. Journal of Experimental Biology 207, no. 10: 1597–1599. doi:10.1242/jeb.00921. Published Version doi:10.1242/jeb.00921 Citable link http://nrs.harvard.edu/urn-3:HUL.InstRepos:30510313 Terms of Use This article was downloaded from Harvard University’s DASH repository, and is made available under the terms and conditions applicable to Other Posted Material, as set forth at http:// nrs.harvard.edu/urn-3:HUL.InstRepos:dash.current.terms-of- use#LAA JEB Classics 1597 THREE GRAY CLASSICS locomotor kinematics, muscle dynamics, JEB Classics is an occasional ON THE BIOMECHANICS and computational fluid dynamic column, featuring historic analyses of animals moving through publications from The Journal of OF ANIMAL MOVEMENT water. Virtually every recent textbook in Experimental Biology. These the field either reproduces one of Gray’s articles, written by modern experts figures directly or includes illustrations in the field, discuss each classic that derive their inspiration from his paper’s impact on the field of figures (e.g. Alexander, 2003; Biewener, biology and their own work. A 2003). PDF of the original paper accompanies each article, and can be found on the journal’s In his 1933a paper, Gray aimed to website as supplemental data. -

The Diversity of Tail Shapes Is One of the Most Salient Characters In
Aberystwyth University Accelerating fishes increase propulsive efficiency by modulating vortex ring geometry Akanyeti, Otar; Putney, Joy; Yanagitsuru, Yuzo R.; Lauder, George V.; Stewart, William J.; Liao, James C. Published in: Proceedings of the National Academy of Sciences of the United States of America DOI: 10.1073/pnas.1705968115 Publication date: 2017 Citation for published version (APA): Akanyeti, O., Putney, J., Yanagitsuru, Y. R., Lauder, G. V., Stewart, W. J., & Liao, J. C. (2017). Accelerating fishes increase propulsive efficiency by modulating vortex ring geometry. Proceedings of the National Academy of Sciences of the United States of America, 114(52), 13828-13833. https://doi.org/10.1073/pnas.1705968115 General rights Copyright and moral rights for the publications made accessible in the Aberystwyth Research Portal (the Institutional Repository) are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the Aberystwyth Research Portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the Aberystwyth Research Portal Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. tel: +44 1970 62 2400 email: [email protected] Download date: 01. Oct. 2021 1 ACCELERATING FISHES INCREASE PROPULSIVE EFFICIENCY BY 2 MODULATING VORTEX RING GEOMETRY. -

Changes in the Fish Community of a Western Caribbean Estuary After the Expansion of an Artificial Channel to the Sea
water Article Changes in the Fish Community of a Western Caribbean Estuary after the Expansion of an Artificial Channel to the Sea Juan J. Schmitter-Soto * and Roberto L. Herrera-Pavón El Colegio de la Frontera Sur, Av. Centenario km 5.5, Chetumal 77014, Quintana Roo, Mexico; [email protected] * Correspondence: [email protected]; Tel.: +52-983-835-0440 (ext. 4302) Received: 30 October 2019; Accepted: 2 December 2019; Published: 6 December 2019 Abstract: Increased connectivity between coastal lagoons and the sea is expected to entail a greater proportion of marine species in the former. Chetumal Bay, estuary of the Hondo river into the Caribbean, had a limited access to the sea until the opening of the Zaragoza Canal. We sought changes in the fish community from 1999–2001 (just after an expansion of the canal) to 2015–2018. The same fishing gear was used, in the same localities, during all seasons. Total fish abundance and mean local richness decreased, although total abundance increased in the polyhaline zone. Diversity was greater in the oligohaline zone in 1999–2001, and in the mesohaline zone in 2015–2018. Three guilds were absent in 2015–2018: Medium-sized herbivores, large piscivores, and medium-sized planktivores. Abundance of small benthivores decreased by decade; medium-sized piscivores and small planktivores became more abundant in 2015–2018 in the polyhaline zone. These changes may be due to the opening of the channel, but illegal fishing outside the bay may explain the decrease in juveniles of large piscivores, and erosion in the innermost part may be destroying important habitats.