Next-Generation Entry/Descent/Landing System for Mars Landers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mars Exploration - a Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani
Chapter Introductory Chapter: Mars Exploration - A Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani 1. Introduction Mars has been a goal of exploration programs of the most important space agencies all over the world for decades. It is, in fact, the most investigated celestial body of the Solar System. Mars robotic exploration began in the 1960s of the twentieth century by means of several space probes sent by the United States (US) and the Soviet Union (USSR). In the recent past, also European, Japanese, and Indian spacecrafts reached Mars; while other countries, such as China and the United Arab Emirates, aim to send spacecraft toward the red planet in the next future. 1.1 Exploration aims The high number of mission explorations to Mars clearly points out the impor- tance of Mars within the Solar System. Thus, the question is: “Why this great interest in Mars exploration?” The interest in Mars is due to several practical, scientific, and strategic reasons. In the practical sense, Mars is the most accessible planet in the Solar System [1]. It is the second closest planet to Earth, besides Venus, averaging about 360 million kilometers apart between the furthest and closest points in its orbit. Earth and Mars feature great similarities. For instance, both planets rotate on an axis with quite the same rotation velocity and tilt angle. The length of a day on Earth is 24 h, while slightly longer on Mars at 24 h and 37 min. The tilt of Earth axis is 23.5 deg, and Mars tilts slightly more at 25.2 deg [2]. -

The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions
Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions Presented at the 2007 ISPA/SCEA Joint International Conference & Workshop June 12-15, New Orleans, LA Bob Bitten, Debra Emmons, Claude Freaner 1 Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com Abstract • The upcoming retirement of the Delta II family of launch vehicles leaves a performance gap between small expendable launch vehicles, such as the Pegasus and Taurus, and large vehicles, such as the Delta IV and Atlas V families • This performance gap may lead to a variety of progressions including – large satellites that utilize the full capability of the larger launch vehicles, – medium size satellites that would require dual manifesting on the larger vehicles or – smaller satellites missions that would require a large number of smaller launch vehicles • This paper offers some comparative costs of co-manifesting single- instrument missions on a Delta IV/Atlas V, versus placing several instruments on a larger bus and using a Delta IV/Atlas V, as well as considering smaller, single instrument missions launched on a Minotaur or Taurus • This paper presents the results of a parametric study investigating the cost- effectiveness of different alternatives and their effect on future NASA missions that fall into the Small Explorer (SMEX), Medium Explorer (MIDEX), Earth System Science Pathfinder (ESSP), Discovery, -
Phoenix Descending NASA’S Mars Strategy Goes from “Follow the Water” to “Arrive at the Ice”
NEWS NATURE|Vol 453|8 May 2008 Phoenix descending NASA’s Mars strategy goes from “follow the water” to “arrive at the ice”. Since 2001, the slogan for from hardware and software. NASA’s Mars programme has “We may not succeed, but we NASA been “follow the water”. deserve to succeed,” he says. With Phoenix, a US$420- Engineers at the Jet Propul- million mission to the edge of sion Laboratory in Pasadena, the planet’s north ice cap, the California, which runs most of agency hopes to finally touch NASA’s planetary missions, will its quarry, in the form of dirty have their last chance to tweak water ice scraped from the the trajectory on 24 May. The subsurface and melted in the next day, Phoenix is expected probe’s on-board ovens. to use the planet’s atmosphere, If all goes as planned, Phoenix and its own heat shielding, will reach the end of its 680- parachutes and retrorockets, to million-kilometre, 10-month- slow itself down from an orbital long journey on 25 May. Its speed of 20,000 kilometres per landing site is in a region where hour to a soft, safe landing at NASA’s orbiting Mars Odyssey just 2.4 metres per second. spacecraft has detected gamma-ray and neu- Phoenix, a 350-kilogram lander, inherited Smith and his team hope that the ice and soil tron signatures suggesting a significant amount hardware from the Mars Surveyor Lander, a samples they will study with the spacecraft’s of hydrogen — thought to be a constituent of mission cancelled in 2000 after the failure of mass-spectrometer and chemical analysis sys- frozen water — near the surface. -
Solar-System-Wide Significance of Mars Polar Science
Solar-System-Wide Significance of Mars Polar Science A White Paper submitted to the Planetary Sciences Decadal Survey 2023-2032 Point of Contact: Isaac B. Smith ([email protected]) Phone: 647-233-3374 York University and Planetary Science Institute 4700 Keele St, Toronto, Ontario, Canada Acknowledgements: A portion of the research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004). © 2020. All rights reserved. 1 This list includes many of the hundreds of current students and scientists who have made significant contributions to Mars Polar Science in the past decade. Every name listed represents a person who asked to join the white paper or agreed to be listed and provided some comments. Author List: I. B. Smith York University, PSI W. M. Calvin University of Nevada Reno D. E. Smith Massachusetts Institute of Technology C. Hansen Planetary Science Institute S. Diniega Jet Propulsion Laboratory, Caltech A. McEwen Lunar and Planetary Laboratory N. Thomas Universität Bern D. Banfield Cornell University T. N. Titus U.S. Geological Survey P. Becerra Universität Bern M. Kahre NASA Ames Research Center F. Forget Sorbonne Université M. Hecht MIT Haystack Observatory S. Byrne University of Arizona C. S. Hvidberg University of Copenhagen P. O. Hayne University of Colorado LASP J. W. Head III Brown University M. Mellon Cornell University B. Horgan Purdue University J. Mustard Brown University J. W. Holt Lunar and Planetary Laboratory A. Howard Planetary Science Institute D. McCleese Caltech C. Stoker NASA Ames Research Center P. James Space Science Institute N. -
+ Mars Reconnaissance Orbiter Launch Press
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Mars Reconnaissance Orbiter Launch Press Kit August 2005 Media Contacts Dolores Beasley Policy/Program Management 202/358-1753 Headquarters [email protected] Washington, D.C. Guy Webster Mars Reconnaissance Orbiter Mission 818/354-5011 Jet Propulsion Laboratory, [email protected] Pasadena, Calif. George Diller Launch 321/867-2468 Kennedy Space Center, Fla. [email protected] Joan Underwood Spacecraft & Launch Vehicle 303/971-7398 Lockheed Martin Space Systems [email protected] Denver, Colo. Contents General Release ..................................………………………..........................................…..... 3 Media Services Information ………………………………………..........................................…..... 5 Quick Facts ………………………………………………………................................….………… 6 Mars at a Glance ………………………………………………………..................................………. 7 Where We've Been and Where We're Going ……………………................…………................... 8 Science Investigations ............................................................................................................... 12 Technology Objectives .............................................................................................................. 21 Mission Overview ……………...………………………………………...............................………. 22 Spacecraft ................................................................................................................................. 33 Mars: The Water Trail …………………………………………………………………...............…… -
L02: Case Studies: the Mars Program
University of Toronto Department of Computer Science University of Toronto Department of Computer Science Lecture 2: NASA JPL’s Mars Program Examples of Poor Engineering Mission Launch Date Arrival Date Outcome Viking I 20 Aug 1975 Landed 20 Jul 1976 Operated until 1982 Viking II 9 Sept 1975 Landed 3 Sept 1976 Operated until 1980 ➜ “Software Forensics” Case Studies: Mars Pathfinder Mars Observer 25 Sept 1992 Last contact: Contact lost just Mars Climate Observer 22 Aug 1993 before orbit insertion Mars Polar Lander Pathfinder 4 Dec 1996 Landed Operated until 27 Sept Deep Space 2 4 July 1997 1997 Global Surveyor 7 Nov 1996 Orbit attained Still operational ➜ Some conclusions 12 Sept 1997 e.g. Reliable software has very little to do with writing good programs Climate Orbiter 11 Dec 1998 Last contact: Contact lost just 23 Sept 1999 before orbit insertion e.g. Humans make mistakes, but good engineering practice catches them! Polar Lander 3 Jan 1999 Last contact: Contact lost before 3 Dec 1999 descent Deep Space 2 3 Jan 1999 Last contact: No data was ever 3 Dec 1999 retrieved Mars Odyssey 7 Apr 2001 Expected: October 24, 2001 © 2001, Steve Easterbrook 1 © 2001, Steve Easterbrook 2 University of Toronto Department of Computer Science University of Toronto Department of Computer Science Mars Pathfinder Remember these pictures? ➜ Mission Demonstrate new landing techniques parachute and airbags Take pictures Analyze soil samples Demonstrate mobile robot technology Sojourner ➜ Major success on all fronts Returned 2.3 billion bits of information -

Mer Landing.Qxd
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Mars Exploration Rover Landings Press Kit January 2004 Media Contacts Donald Savage Policy/Program Management 202/358-1547 Headquarters [email protected] Washington, D.C. Guy Webster Mars Exploration Rover Mission 818/354-5011 Jet Propulsion Laboratory, [email protected] Pasadena, Calif. David Brand Science Payload 607/255-3651 Cornell University, [email protected] Ithaca, N.Y. Contents General Release …………………………………………………………..................................…… 3 Media Services Information ……………………………………….........................................…..... 5 Quick Facts ………………………………………………………................................……………… 6 Mars at a Glance ……………………………………………………….................................………. 7 Historical Mars Missions ………………………………………………….....................................… 8 Mars: The Water Trail ………………………………………………………………….................…… 9 Where We've Been and Where We're Going …………………………………................ 14 Science Investigations .............................................................................................................. 17 Landing Sites ............................................................................................................................. 23 Mission Overview ……………...………………………………………..............................………. 28 Spacecraft ................................................................................................................................. 38 Program/Project Management …………………………………………….................................… -

After the Mars Polar Lander: Where to Next? D. A. Paige1 , W. V. Boynton2, D
Concepts and Approaches for Mars Exploration 6122.pdf After the Mars Polar Lander: Where to next? D. A. Paige1 , W. V. Boynton2, D. Crisp3, E. DeJong3, C. J. Han- sen3, A. M. Harri4, H. U. Keller5, L. A. Leshin6, R. D. May7, P. H. Smith2, R. W. Zurek3, 1Dept. of Earth and Space Sciences, UCLA, Los Angeles, Ca 90095 [email protected], 2University of Arizona,. 3Jet Propulsion Laboratory, 4Finnish Meteorological Institute, 5Max Planck Institute for Aeronomy, 6Arizona State University, 7Spectrasensors Inc. Introduction: The recent loss of the Mars Polar cant new datasets which are revolutionizing our un- Lander (MPL) mission represents a serious setback to derstanding of the planet. The MGS results in the Mars science and exploration. Targeted to land on the north and south polar regions that have been pub- Martian south polar layered deposits at 76° S latitude lished to date have been particularly exciting. MOLA and 195° W longitude, it would have been the first topographic maps show that both polar caps have ap- mission to study the geology, atmospheric environ- proximately 3 km of total relief; and have shapes that ment and volatiles at a high-latitude landing site. are consistent with those expected for large ice sheets. Since the conception of the MPL mission, a Mars ex- The MOLA data also suggest that both caps may have ploration strategy has emerged which focuses on Cli- been significantly larger at some point in their past mate, Resources and Life, with the behavior and his- history [1]. The north polar cap lies in a regional tory of water as the unifying theme. -

Unlocking the Climate Record Stored Within Mars' Polar Layered Deposits
Unlocking the Climate Record Stored within Mars' Polar Layered Deposits Final Report Keck Institute for Space Studies Isaac B. Smith York University and Planetary Science Instute Paul O. Hayne University of Colorado - Boulder Shane Byrne University of Arizona Pat Becerra University Bern Melinda Kahre NASA Ames Wendy Calvin University of Nevada - Reno Chrisne Hvidberg University of Copenhagen Sarah Milkovich Jet Propulsion Laboratory Peter Buhler Jet Propulsion Laboratory Margaret Landis Planetary Science Instute Briony Horgan Purdue University Armin Kleinböhl Jet Propulsion Laboratory Mahew Perry Planetary Science Instute Rachel Obbard Dartmouth University Jennifer Stern Goddard Space Flight Center Sylvain Piqueux Jet Propulsion Laboratory Nick Thomas University Bern Kris Zacny Honeybee Robocs Lynn Carter University of Arizona Lauren Edgar United States Geological Survey Jeremy EmmeM New Mexico State University Thomas Navarro University of California, Los Angeles Jennifer Hanley Lowell Observatory Michelle Koutnik University of Washington Nathaniel Putzig Planetary Science Instute Bryana L. Henderson Jet Propulsion Laboratory John W. Holt University of Arizona Bethany Ehlmann California Instute of Technology Sergio Parra Georgia Instute of Technology Daniel Lalich Cornell University Candy Hansen Planetary Science Instute Michael Hecht Haystack Observatory Don Banfield Cornell University Ken Herkenhoff United States Geological Survey David A. Paige University of California, Los Angeles Mark Skidmore Montana State University Robert L. Staehle Jet Propulsion Laboratory Mahew Siegler Planetary Science Instute 0. Execu)ve Summary 1. Background 1.A Mars Polar Science Overview and State of the Art 1.A.1 Polar ice deposits overview and present state 1.A.2 Polar Layered Deposits formaon and layers 1.A.3 Climate models and PLD formaon 1.A.4 Terrestrial Climate Studies Using Ice 1.B History of Mars Polar Invesgaons 1.B.1 Orbiters 1.B.2 Landers 1.B.3 Previous Concept Studies 2. -
Successes and Failures of Recent Mars Exploration
Successes and Failures of Recent Mars Exploration Paul Withers [email protected] Boston University’s Center for Space Physics 2004.02.13 Bill Waller’s undergrad seminar class at Tufts University Aims of this talk • Describe the past decade of Mars exploration • Describe how half of attempted missions failed • Describe how NASA responded to failures in short and long term • Discuss lessons learned • Not an overview of Mars science Sequence of Missions • Mars Observer (1992) failure • Mars 96 (1996) [Russia] failure • Mars Pathfinder (1996) success • Mars Global Surveyor (1996) success • Nozomi (1998) [Japan] failure • Mars Climate Orbiter (1998) failure • Mars Polar Lander (1999) failure • Deep Space 2 (1999) (2 small probes) failure (x2) • 2001 Mars Odyssey (2001) success • Mars Express (2003) [ESA] success (?) • Beagle 2 (2003) [ESA/UK] failure • Mars Exploration Rovers Spirit and Opportunity (2003) success (x2) (?) • 12 years, 14 spacecraft, 8 failures, 3 successes, 3 probable successes Mars Observer (1992) Scientific Aims of Mars Observer • Global topo and gravity map • Measure magnetic field • Elemental makeup of surface • 2m-pixel images of surface • Mineralogical map of surface • Study atmospheric circulation • $980 mission, first US mission to Mars since Viking in 1976. Failure of Mars Observer • Plan: Pressurize fuel tank a few days before Mars Orbit Insertion • Plan: Turn transmitter off during pressurization to protect its components from shock, turn on again after pressurization complete • Reality: No further transmissions received after start of pressurization, complete loss of mission. • Failure Analysis: A fuel line ruptured during pressurization and the corrosive fuel disabled the spacecraft. Some parts were designed assuming pressurization after launch, not many months after launch. -

Mars Science Laboratory Landing
PRESS KIT/JULY 2012 Mars Science Laboratory Landing Media Contacts Dwayne Brown NASA’s Mars 202-358-1726 Steve Cole Program 202-358-0918 Headquarters [email protected] Washington [email protected] Guy Webster Mars Science Laboratory 818-354-5011 D.C. Agle Mission 818-393-9011 Jet Propulsion Laboratory [email protected] Pasadena, Calif. [email protected] Science Payload Investigations Alpha Particle X-ray Spectrometer: Ruth Ann Chicoine, Canadian Space Agency, Saint-Hubert, Québec, Canada; 450-926-4451; [email protected] Chemistry and Camera: James Rickman, Los Alamos National Laboratory, Los Alamos, N.M.; 505-665-9203; [email protected] Chemistry and Mineralogy: Rachel Hoover, NASA Ames Research Center, Moffett Field, Calif.; 650-604-0643; [email protected] Dynamic Albedo of Neutrons: Igor Mitrofanov, Space Research Institute, Moscow, Russia; 011-7-495-333-3489; [email protected] Mars Descent Imager, Mars Hand Lens Imager, Mast Camera: Michael Ravine, Malin Space Science Systems, San Diego; 858-552-2650 extension 591; [email protected] Radiation Assessment Detector: Donald Hassler, Southwest Research Institute; Boulder, Colo.; 303-546-0683; [email protected] Rover Environmental Monitoring Station: Luis Cuesta, Centro de Astrobiología, Madrid, Spain; 011-34-620-265557; [email protected] Sample Analysis at Mars: Nancy Neal Jones, NASA Goddard Space Flight Center, Greenbelt, Md.; 301-286-0039; [email protected] Engineering Investigation MSL Entry, Descent and Landing Instrument Suite: Kathy Barnstorff, NASA Langley Research Center, Hampton, Va.; 757-864-9886; [email protected] Contents Media Services Information. -
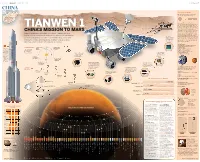
China's Mission to Mars S
6 CHINA DAILY | HONG KONG EDITION Friday, July 24, 2020 | 7 CHINA FACTS ABOUT MARS Mars is the fourth planet from the Sun and the Wenchang second-smallest planet in our solar system. HAINAN Lander Mars is one of the four terrestrial planets and is more like Earth than any other planet in the system. TIANWEN 1 The earliest record of the observation of Mars can be traced to ancient Egypt around 2000 BC. The red planet made its first appearances in China’s history around 1300 BC on oracle bone inscriptions. In CHINA’S MISSION TO MARS ancient China, it was named Yinghuo , derived from ancient astronomers’ observations that it moved - like a capricious flame in the night sky. The name Aims to fulfill three scientific objectives orbiting the red includes meanings of war and unrest. It is usually planet for comprehensive observation, landing on the Martian not difficult to see Mars with the naked eye as its Mars surface apparent magnitude is surpassed only by Venus, the surface and sending a rover to roam the landing site. It will compound detector to Earth’s moon and our sun. Mars appears red-orange study high-resolution when seen from Earth because its surface contains spectral signatures of conduct scientific investigations on Mars’ soil, geological lots of iron oxides. Here are some other basic facts surface substances structure, environment, atmosphere and water. about our planetary neighbor: Total surface area: LONG 144,798,500 sq km, about 28 percent of Earth’s MARCH 5 and nearly the same as Earth’s land area LONG JOURNEY Earth-Mars Position of Mars scientific instruments are Equatorial radius: With more than transfer when the carrier The 5-ton spacecraft trajectory is launched mounted on the 3,396 km, about half that of Earth 750 metric tons Length of a solar day on Mars: of propellants, will travel more than orbiter and each Long March 400 million km in the rover 24 hours, 39 minutes, and 35 seconds 5 has a liftoff nearly seven months.