Safety Petition General Motors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

United States Patent (19) 11 Patent Number: 5,836,541 Pham (45) Date of Patent: Nov
USOO5836541A United States Patent (19) 11 Patent Number: 5,836,541 Pham (45) Date of Patent: Nov. 17, 1998 54) EASILY-CONVERTIBLE FIXED-WING 3,986,686 10/1976 Girard ..................................... 244f7 A ROADABLE AIRCRAFT 4,269,374 5/1981 Miller .......................................... 244/2 4,720,061 1/1988 Abdenour et al. ... 244/46 76 Inventor: Roger N. C. Pham, 625 Veranda Ct., 4.881,701 11/1989 Bullard - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 244/2 #1140, Grand Prairie, Tex. 75050 5,050,817 9/1991 Miller .......................................... 244/2 21 Appl.ppl. No.: 859,7329 Primary Examiner-Galen L. Barefoot 57 ABSTRACT 22 Filed: May 21, 1997 57 A fixed-wing four-seat light aircraft that can be easily Related U.S. Application Data converted to a roadway vehicle within minutes by a single perSon in the field, comprising a one-piece wing center panel 63 Continuation-in-part of Ser. No. 811,503, Mar. 5, 1997. with foldable wing tips on each sides. The whole wing unit (51) Int. Cl. ............................................... B64C37.00 is then rotatably mounted on top of the fuselage. The aircraft 52 U.S. CI 24412; 244/46; 244/49 features a conventional front-engine-and-propeller lay-out, 58 Fi la fs - - - - - - - - h - - - - - - - - - - - - - - - - - - - - - - - s 2442. 46.49 with a short fuselage for convenient roadability and 58) Field of Searc 244/135R, 1 R, 100 R. 1 02 R 50 garageability, with horizontal Stabilizer of Significant Span s s s s with foldable tips for adequate flight stability. The vehicle 56) References Cited has a low ride-height with a low center of gravity, four wheels with independent Suspension, nose-height leveling U.S. -

Preparation of Papers for AIAA Technical Conferences
15th AIAA Aviation Technology, Integration, and Operations Conference 2015 Held at the AIAA Aviation Forum 2015 Dallas, Texas, USA 22-26 June 2015 Volume 1 of 3 ISBN: 978-1-5108-0818-8 Printed from e-media with permission by: Curran Associates, Inc. 57 Morehouse Lane Red Hook, NY 12571 Some format issues inherent in the e-media version may also appear in this print version. The contents of this work are copyrighted and additional reproduction in whole or in part are expressly prohibited without the prior written permission of the Publisher or copyright holder. The resale of the entire proceeding as received from CURRAN is permitted. For reprint permission, please contact AIAA’s Business Manager, Technical Papers. Contact by phone at 703-264-7500; fax at 703-264-7551 or by mail at 1801 Alexander Bell Drive, Reston, VA 20191, USA. TABLE OF CONTENTS VOLUME 1 TERMINAL & SURFACE OPERATIONS I A Robust and Practical Decision Support Tool for Integrated Arrival-Departure-Surface Traffic Management (AIAA 2015-2270)...............................................................................................................................................................................................1 Aditya Saraf, Valentino Felipe, Bruce Sawhill Identification of Local and Propagated Queuing Effects at Major Airports (AIAA 2015-2271)............................................................16 Husni R. Idris Taxi Time Prediction at Charlotte Airport Using Fast-Time Simulation and Machine Learning Techniques (AIAA 2015-2272)..........................................................................................................................................................................................................32 -
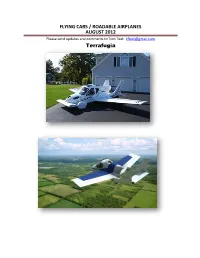
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please Send Updates and Comments to Tom Teel: [email protected] Terrafugia
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please send updates and comments to Tom Teel: [email protected] Terrafugia INTERNATIONAL FLYING CAR ASSOCIATION http://www.flyingcarassociation.com We'd like to welcome you to the International Flying Car Association. Our goal is to help advance the emerging flying car industry by creating a central resource for information and communication between those involved in the industry, news networks, governments, and those seeking further information worldwide. The flying car industry is in its formative stages, and so is IFCA. Until this site is fully completed, we'd like to recommend you visit one of these IFCA Accredited Sites. www.flyingcars.com www.flyingcarreviews.com www.flyingcarnews.com www.flyingcarforums.com REFERENCE INFORMATION Roadable Times http://www.roadabletimes.com Transformer - Coming to a Theater Near You? http://www.aviationweek.com/Blogs.aspx?plckBlo PARAJET AUTOMOTIVE - SKYCAR gId=Blog:a68cb417-3364-4fbf-a9dd- http://www.parajetautomotive.com/ 4feda680ec9c&plckController=Blog&plckBlogPage= In January 2009 the Parajet Skycar expedition BlogViewPost&newspaperUserId=a68cb417-3364- team, led by former British army officer Neil 4fbf-a9dd- Laughton and Skycar inventor Gilo Cardozo 4feda680ec9c&plckPostId=Blog%253aa68cb417- successfully completed its inaugural flight, an 3364-4fbf-a9dd- incredible journey from the picturesque 4feda680ec9cPost%253a6b784c89-7017-46e5- surroundings of London to Tombouctou. 80f9- Supported by an experienced team of overland 41a312539180&plckScript=blogScript&plckElement -

(12) United States Patent (10) Patent No.: US 9,555,681 B2 Klein (45) Date of Patent: Jan
USO09555681 B2 (12) United States Patent (10) Patent No.: US 9,555,681 B2 Klein (45) Date of Patent: Jan. 31, 2017 (54) TRANSFORMATION METHOD OF HYBRD B64C 3/54: B64C 3/56; B64C TRANSPORTATION VEHICLE FOR 25/04; B64C 25/54: B64C 37/00; B64C GROUND AND AIR, AND HYBRID 2025/003; B64C 3/58; Y02T 50/145 TRANSPORTATION VEHICLE ITSELF (Continued) (75) Inventor: Stefan Klein, Nitra (SK) (56) References Cited (73) Assignee: AEROMOBIL, S.R.O., Bratislava (SK) U.S. PATENT DOCUMENTS 1,793,494 A 2f1931 Lee (*) Notice: Subject to any disclaimer, the term of this 3,029,042 A * 4, 1962 Martin ...................... B6OF 3.00 patent is extended or adjusted under 35 180,119 U.S.C. 154(b) by 142 days. (Continued) (21) Appl. No.: 14/241,239 FOREIGN PATENT DOCUMENTS (22) PCT Filed: Aug. 22, 2012 CH 295.572 A 12/1953 DE 10346189 B3 5, 2005 (86). PCT No.: PCT/SK2O12/OOOO10 (Continued) S 371 (c)(1), (2), (4) Date: Aug. 19, 2014 OTHER PUBLICATIONS PCT International Search Report, Issued in International Applica (87) PCT Pub. No.: WO2013/032409 tion No. PCT/SK2012/000010 dated Dec. 12, 2012. PCT Pub. Date: Mar. 7, 2013 (Continued) (65) Prior Publication Data Primary Examiner — Timothy D Collins US 2015/OO2815O A1 Jan. 29, 2015 Assistant Examiner — Jessica Wong (74) Attorney, Agent, or Firm — Finnegan, Henderson, (30) Foreign Application Priority Data Farabow, Garrett & Dunner LLP. Aug. 30, 2011 (SK) ................................... 5O39-2011 (57) ABSTRACT Aug. 30, 2011 (SK) ............................... 5044-2011 U Transformation method of hybrid transportation vehicle for ground and air includes the following transformation and (51) Int. -

The the Roadable Aircraft Story
www.PDHcenter.com www.PDHonline.org Table of Contents What Next, Slide/s Part Description Flying Cars? 1N/ATitle 2 N/A Table of Contents 3~53 1 The Holy Grail 54~101 2 Learning to Fly The 102~155 3 The Challenge 156~194 4 Two Types Roadable 195~317 5 One Way or Another 318~427 6 Between the Wars Aircraft 428~456 7 The War Years 457~572 8 Post-War Story 573~636 9 Back to the Future 1 637~750 10 Next Generation 2 Part 1 Exceeding the Grasp The Holy Grail 3 4 “Ah, but a man’s reach should exceed his grasp, or what’s a heaven f?for? Robert Browning, Poet Above: caption: “The Cars of Tomorrow - 1958 Pontiac” Left: a “Flying Auto,” as featured on the 5 cover of Mechanics and Handi- 6 craft magazine, January 1937 © J.M. Syken 1 www.PDHcenter.com www.PDHonline.org Above: for decades, people have dreamed of flying cars. This con- ceptual design appeared in a ca. 1950s issue of Popular Mechanics The Future That Never Was magazine Left: cover of the Dec. 1947 issue of the French magazine Sciences et Techniques Pour Tous featur- ing GM’s “RocAtomic” Hovercar: “Powered by atomic energy, this vehicle has no wheels and floats a few centimeters above the road.” Designers of flying cars borrowed freely from this image; from 7 the giant nacelles and tail 8 fins to the bubble canopy. Tekhnika Molodezhi (“Tech- nology for the Youth”) is a Russian monthly science ma- gazine that’s been published since 1933. -

Las Estrategias De Las Empresas Automovilísticas Con El Coche
Facultad de Ciencias Económicas y Empresariales LAS ESTRATEGIAS DE LAS EMPRESAS AUTOMOVILÍSTICAS CON EL COCHE AUTÓNOMO Y LOS NUEVOS JUGADORES Autor: María Gabriela Anitua Galdón Director: Miguel Á ngel López Gómez MADRID | Abril 2019 2 RESUMEN El presente trabajo analiza las diversas estrategias concernientes al coche autónomo, implementadas por los nuevos jugadores en contraposición con los competidores tradicionales. En primer lugar, se contextualiza la temática en cuestión, a través de un enfoque histórico y conceptual del vehículo automatizado. Posteriormente, se presentan una serie de teorías estratégicas relacionadas con la temática planteada y las implicaciones de éstas. A continuación, a través del estudio de casos, se extraen determinadas conclusiones relativas al futuro del sector automovilístico, así como una serie de posibles líneas de investigación y estrategias ganadoras para los competidores, con el fin de alcanzar la victoria en la carrera planteada, que supondrá el cambio más relevante de los próximos siglos en relación a la industria automovilística. Palabras clave: vehículo autónomo, estrategia, transporte, nuevos jugadores, industria automovilística, innovación disruptiva y automatización. 3 ABSTRACT This paper analyses the various strategies concerning the autonomous vehicle, implemented by new players in contrast to traditional competitors. First of all, the subject matter is contextualized, through a historical and conceptual approach of the automated vehicle. Subsequently, a series of strategic theories related to the proposed theme and its consequences are presented. The case studies draw certain conclusions regarding the future of the automobile sector, as well as a series of possible lines of research and winning strategies for competitors, in order to achieve victory in the proposed race, which will represent the most important change in the coming centuries in relation to the automotive sector. -

Autonomous Vehicle Benchmarking Using Unbiased Metrics
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) October 25-29, 2020, Las Vegas, NV, USA (Virtual) Autonomous Vehicle Benchmarking using Unbiased Metrics David Paz1∗, Po-jung Lai1∗, Nathan Chan2∗, Yuqing Jiang2∗ Henrik I. Christensen2∗ Abstract— With the recent development of autonomous vehi- ment reports2 are not time and distance normalized: did the cle technology, there have been active efforts on the deployment vehicle experience five disengagements during the course of this technology at different scales that include urban and of 10 miles or 10,000 miles? Or did it experience five highway driving. While many of the prototypes showcased have been shown to operate under specific cases, little effort disengagements over the course of 10 minutes or 2,000 has been made to better understand their shortcomings and hours? generalizability to new areas. Distance, uptime and number of Given the lack of spatiotemporal information, in many manual disengagements performed during autonomous driving cases, these unnormalized reports make it impossible to provide a high-level idea on the performance of an autonomous quantify the performance and robustness of the autonomous system but without proper data normalization, testing location information, and the number of vehicles involved in testing, systems and most importantly quantify their overall safety the disengagement reports alone do not fully encompass system with respect to other autonomous systems or human drivers. performance and robustness. Thus, in this study a complete set This study aims to shed light on autonomous system of metrics are applied for benchmarking autonomous vehicle technology performance and safety by leveraging spatiotem- systems in a variety of scenarios that can be extended for poral information and metrics geared towards benchmarking comparison with human drivers and other autonomous vehicle 3 systems. -

F-4 Phantom-Ii Metu & Odtü Teknokent Qatar Armed
VOLUME 14 . ISSUE 98 . YEAR 2020 METU & ODTÜ TEKNOKENT TURKEY’S PIONEER IN UNIVERSITY-INDUSTRY THE STATE OF QATAR AND COOPERATION QATAR ARMED FORCES F-4 PHANTOM-II FLIGHT ROUTE IN TURKEY & WORLD T70 GETTING READY FOR ITS MAIDEN FLIGHT! ISSN 1306 5998 INTERNATIONAL FUTURE SOLDIER CONFERENCE 29-30 SEPTEMBER 2020 Sheraton-Ankara Within the scope of the planned conference program, panels, presentations, and discussions will be held in the following related technology fields: • Combat Clothing, Individual Equipment & Balistic Protection • Weapons, Sensors, Non Lethal Weapons, Ammunition • Power Solutions • Soft Target Protection • Soldier Physical, Mental and Cognitive Performance INTERNATIONAL • Robotics and Autonomous Systems SOLDIECONFERENCE R • Medical FUTURE • C4ISTAR Systems ifscturkey.com • Exoskeleton Technology • CBRN • Logistics Capability organised by supported by supported by supported by in cooperation with Publisher 6 34 Hatice Ayşe EVERS Editor in Chief Ayşe AKALIN [email protected] Managing Editor Cem AKALIN [email protected] International Relations Director Şebnem AKALIN [email protected] Turkey & Qatar Foul-Weather Friends! Editor İbrahim SÜNNETÇİ [email protected] Administrative Coordinator Yeşim BİLGİNOĞLU YÖRÜK [email protected] 48 Correspondent Saffet UYANIK [email protected] A Message from the President F-4 Phantom II Flight Translation of Defense Industries Prof. Route in Turkey & Tanyel AKMAN İsmail DEMİR on the Measures [email protected] Taken Against COVID-19 in World Turkey Editing Mona Melleberg YÜKSELTÜRK Graphics & Design Gülsemin BOLAT Görkem ELMAS [email protected] 12 Photographer Sinan Niyazi KUTSAL Advisory Board (R) Major General Fahir ALTAN (R) Navy Captain Zafer BETONER Prof Dr. -

2014 Automated Vehicles Symposium Proceedings
2014 Automated Vehicles Symposium Proceedings 2014 Automated Vehicle Symposium – Synopsis of Proceedings DISCLAIMER The opinions, findings, and conclusions expressed in this publication are those of the speakers and contributors to the Automated Vehicle Symposium and not necessarily those of the United States Department of Transportation. The United States Government assumes no liability for its contents or use thereof. If trade names manufacturers’ names or specific products are mentioned, it is because they are considered essential to the object of the publication and should not be construed as an endorsement. The United States Government does not endorse products or manufacturers. 2014 Automated Vehicles Symposium Proceedings—Final December 2014 Publication Number: FHWA-JPO-14-176 Prepared by: Volpe National Transportation Systems Center Cambridge, MA 02142 Prepared for: Intelligent Transportation Systems Joint Program Office Office of the Assistant Secretary for Research and Technology 1200 New Jersey Avenue, S.E. Washington, DC 20590 2 Acknowledgments The 2014 Automated Vehicles Symposium (AVS 2014) was produced through a partnership between the Association of Unmanned Vehicle Systems International (AUVSI) and Transportation Research Board (TRB), and is indebted to its many volunteer contributors and speakers who developed the symposium content, produced sessions, and contributed to the development of these proceedings. AVS 2014 also benefitted from the direct financial contributions of its commercial benefactors, and the institutional support of the many companies and agencies that supported the time, travel, and participation for their staff. The organizing committee gratefully acknowledges the United States Department of Transportation (U.S. DOT) Intelligent Transportation Systems Joint Program Office (ITS JPO) for the level of its support to AVS 2014 and for these proceedings. -

2017/19: Should Australia Adopt Driverless Vehicles? File:///C:/Dpfinal/Schools/Doca2017/2017Autocar/2017Autocar.Html
2017/19: Should Australia adopt driverless vehicles? file:///C:/dpfinal/schools/doca2017/2017autocar/2017autocar.html ? 2017/19: Should Australia adopt driverless vehicles? What they said... 'A large proportion (of car accidents) could be avoided by using self-driving vehicles' Hussein Dia, chair of Civil Engineering at Swinburne University of Technology ' If we see children distracted by the ice cream truck across the street, we know to slow down, as they may dash toward it. Today's computers aren't nearly as skilled at interpreting complex situations like these' Andrew Ng, director of Baidu's Institute of Deep Learning The issue at a glance On November 29, 2017, it was announced that Perth would be one of the first cities in the world to test fully-automated vehicles in 2018. The city will trial driverless hire cars capable of picking up passengers. http://www.abc.net.au/news/2017-11-29/uber-style-driverless-cars-to-be-tested-in- perth-in-global-trial/9207120 The year before, in August 2016, Perth began trialling Australia's first driverless shuttle bus along the foreshore in South Perth. http://www.abc.net.au/news/2016-08-31/driverless-bus-trialed-in- south-perth/7802976 The technology is proving attractive to other Australian states and territories who are already making changes to road laws to ready themselves for trials of automated vehicles. https://www.ntc.gov.au/current-projects/changing-driving-laws-to-support-automated-vehicles/ However, a range of analysts have suggested the enthusiasm for automated vehicles is premature and that the new technology will be more problematic than many realise. -
Smart Moves Required—The Road Towards Artificial Intelligence In
SMART MOVES REQUIRED – THE ROAD TOWARDS ARTIFICIAL INTELLIGENCE IN MOBILITY September 2017 SMART MOVES REQUIRED – THE ROAD TOWARDS ARTIFICIAL INTELLIGENCE IN MOBILITY CONTENTS Executive summary ..................................................................................................................... 6 1 AI in mobility and automotive – industry buzz or industry buster? ........................................... 10 1.1 Not everything that is new is AI; many applications actually build on traditional methods .........................................................................................................11 1.2 We pragmatically describe ML for mobility along three main criteria .................................14 1.3 ML is not optional – it is a significant source of competitive advantage for the next decades in automotive/mobility ..........................................................................14 2 ML-based automotive/mobility applications show significant opportunities – especially because consumers’ openness is higher than expected .................................16 2.1 Surprisingly, there is little reluctance from consumers towards AI – especially in light of applications that bring convenience and comfort ..............................................17 2.2 New value pools are created through AI-based/-enhanced applications – however, many require exploration of new business models from automotive players .....................19 3 However, for any automotive player to benefit from ML, several challenges -

Personal Air Vehicles As a New Option for Commuting in Europe: Vision Or Illusion?
Submission to European Transport Conference 2013 Title: Personal air vehicles as a new option for commuting in Europe: vision or illusion? Authors: Decker, Michael; Fleischer, Torsten; Meyer-Soylu, Sarah; Schippl, Jens All: Karlsruhe Institute of Technology, Institute of Technology Assessment and System Analysis Corresponding author: [email protected] Theme: Future mobility services Abstract Based on preliminary findings from the FP7 project “MyCopter”, the paper assesses the presuppositions for and the potential implications of “personal air vehicles” as a future mobility service. 1 Introduction A broad range of technology trajectories can be observed enabling new mobility options and services in future transport system (Wiesenthal et al. 2011). Usually, Information and Communication technologies (ICT) are playing a key-role in this context. Well in line with the objectives of sustainable transport there usually is a focus on making transport modes cleaner (Skinner et al. 2010), reducing mobility needs or enabling a modal shift to more efficient modes of transport (Banister 2008, CEC 2011). But the future is open and hardly predictable, even if there surely is a potential for governing also complex socio-technical systems such as a transport system in a desired direction. Nevertheless, it is always possible and should not be ignored that “surprises” emerge on the scene which have not been really anticipated by the majority of experts in the field. In an ex post analysis these development are reconstructed as “disruptive” innovations (Markides 2006). Prominent examples can be found in the ICT sector, with the extremely fast diffusion of personal computers and cell phones. To give an example from the transport sector: for long time it has not really been envisioned that the market penetration of e-mobility will make its first success story in the bicycle sector (Hurst 2013).