Talkha Steel Highway Bridge Monitoring and Movement Identification Using RTK-GPS Technique ⇑ Mohamed T
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Thermal Power Plants (Training by Countries) by Egypt And, After Performing an On-Site Investigation, Acknowledged the Need and Legitimacy for It
The Arab Republic of Egypt Ministry of Electricity and Renewable Energy The Project for Capacity Development for Operation and Maintenance of Thermal Power Stations in the Arab Republic of Egypt Final Report (October 2017 to August 2019) October 2019 Japan International Cooperation Agency (JICA) The Kansai Electric Power Co., Inc. List of abbreviations No. Abbreviation Definition 1 APUA African Power Utility Association 2 ATD Advanced Technology Development 3 CEPC Cairo Electricity Production Company 4 COD Commercial Operation Date 5 EEHC Egyptian Electricity Holding Company 6 EOH Equivalent Operating Hours 7 EP Electrostatic Precipitator 8 EPC Engineering, Procurement and Construction 9 FAC Flow Accelerated Corrosion 10 GE General Electric 11 GEN Generator 12 GT Gas Turbine 13 GTCC Gas Turbine Combined Cycle 14 HRSG Heat Recovery Steam Generator 15 IPP Independent Power Producer 16 JICA Japan International Cooperation Agency 17 LTSA Long Term Service Agreement 18 MDEPC Middle Delta Electricity Production Company 19 MHI Mitsubishi Heavy Industry 20 MHPS Mitsubishi Hitachi Power Systems 21 MOM Minutes of Meeting 22 MW Megawatt 23 NG Nature Gas 24 O&M Operation and Maintenance 24 O&M Operation and Maintenance 25 OEM Original Equipment Manufacturer 26 OJT On the Job Training 27 PC personal Computer 28 PLC Programmable Logic Controller 29 RE Renewable Energy 30 RH Re-heater 31 SH Super Heater 32 ST Steam Turbine 33 TPP Thermal Power Plant 34 UEEPC Upper Egypt Electricity Production Company 35 WDEPC West Delta Electricity Production Company i 1 Project Overview ···················································································· 1 1.1 Overview (Backgrounds) ...................................................................................................... 1 1.2 Project history ....................................................................................................................... 1 1.3 Objectives and introduction of JICA Expert Team (Kansai Electric Power) ....................... -

Mints – MISR NATIONAL TRANSPORT STUDY
No. TRANSPORT PLANNING AUTHORITY MINISTRY OF TRANSPORT THE ARAB REPUBLIC OF EGYPT MiNTS – MISR NATIONAL TRANSPORT STUDY THE COMPREHENSIVE STUDY ON THE MASTER PLAN FOR NATIONWIDE TRANSPORT SYSTEM IN THE ARAB REPUBLIC OF EGYPT FINAL REPORT TECHNICAL REPORT 11 TRANSPORT SURVEY FINDINGS March 2012 JAPAN INTERNATIONAL COOPERATION AGENCY ORIENTAL CONSULTANTS CO., LTD. ALMEC CORPORATION EID KATAHIRA & ENGINEERS INTERNATIONAL JR - 12 039 No. TRANSPORT PLANNING AUTHORITY MINISTRY OF TRANSPORT THE ARAB REPUBLIC OF EGYPT MiNTS – MISR NATIONAL TRANSPORT STUDY THE COMPREHENSIVE STUDY ON THE MASTER PLAN FOR NATIONWIDE TRANSPORT SYSTEM IN THE ARAB REPUBLIC OF EGYPT FINAL REPORT TECHNICAL REPORT 11 TRANSPORT SURVEY FINDINGS March 2012 JAPAN INTERNATIONAL COOPERATION AGENCY ORIENTAL CONSULTANTS CO., LTD. ALMEC CORPORATION EID KATAHIRA & ENGINEERS INTERNATIONAL JR - 12 039 USD1.00 = EGP5.96 USD1.00 = JPY77.91 (Exchange rate of January 2012) MiNTS: Misr National Transport Study Technical Report 11 TABLE OF CONTENTS Item Page CHAPTER 1: INTRODUCTION..........................................................................................................................1-1 1.1 BACKGROUND...................................................................................................................................1-1 1.2 THE MINTS FRAMEWORK ................................................................................................................1-1 1.2.1 Study Scope and Objectives .........................................................................................................1-1 -
ACLED) - Revised 2Nd Edition Compiled by ACCORD, 11 January 2018
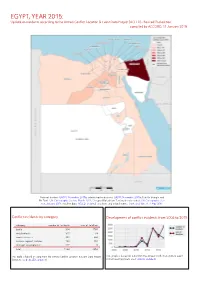
EGYPT, YEAR 2015: Update on incidents according to the Armed Conflict Location & Event Data Project (ACLED) - Revised 2nd edition compiled by ACCORD, 11 January 2018 National borders: GADM, November 2015b; administrative divisions: GADM, November 2015a; Hala’ib triangle and Bir Tawil: UN Cartographic Section, March 2012; Occupied Palestinian Territory border status: UN Cartographic Sec- tion, January 2004; incident data: ACLED, undated; coastlines and inland waters: Smith and Wessel, 1 May 2015 Conflict incidents by category Development of conflict incidents from 2006 to 2015 category number of incidents sum of fatalities battle 314 1765 riots/protests 311 33 remote violence 309 644 violence against civilians 193 404 strategic developments 117 8 total 1244 2854 This table is based on data from the Armed Conflict Location & Event Data Project This graph is based on data from the Armed Conflict Location & Event (datasets used: ACLED, undated). Data Project (datasets used: ACLED, undated). EGYPT, YEAR 2015: UPDATE ON INCIDENTS ACCORDING TO THE ARMED CONFLICT LOCATION & EVENT DATA PROJECT (ACLED) - REVISED 2ND EDITION COMPILED BY ACCORD, 11 JANUARY 2018 LOCALIZATION OF CONFLICT INCIDENTS Note: The following list is an overview of the incident data included in the ACLED dataset. More details are available in the actual dataset (date, location data, event type, involved actors, information sources, etc.). In the following list, the names of event locations are taken from ACLED, while the administrative region names are taken from GADM data which serves as the basis for the map above. In Ad Daqahliyah, 18 incidents killing 4 people were reported. The following locations were affected: Al Mansurah, Bani Ebeid, Gamasa, Kom el Nour, Mit Salsil, Sursuq, Talkha. -

Egyptian Natural Gas Industry Development
Egyptian Natural Gas Industry Development By Dr. Hamed Korkor Chairman Assistant Egyptian Natural Gas Holding Company EGAS United Nations – Economic Commission for Europe Working Party on Gas 17th annual Meeting Geneva, Switzerland January 23-24, 2007 Egyptian Natural Gas Industry History EarlyEarly GasGas Discoveries:Discoveries: 19671967 FirstFirst GasGas Production:Production:19751975 NaturalNatural GasGas ShareShare ofof HydrocarbonsHydrocarbons EnergyEnergy ProductionProduction (2005/2006)(2005/2006) Natural Gas Oil 54% 46 % Total = 71 Million Tons 26°00E 28°00E30°00E 32°00E 34°00E MEDITERRANEAN N.E. MED DEEPWATER SEA SHELL W. MEDITERRANEAN WDDM EDDM . BG IEOC 32°00N bp BALTIM N BALTIM NE BALTIM E MED GAS N.ALEX SETHDENISE SET -PLIOI ROSETTA RAS ELBARR TUNA N BARDAWIL . bp IEOC bp BALTIM E BG MED GAS P. FOUAD N.ABU QIR N.IDKU NW HA'PY KAROUS MATRUH GEOGE BALTIM S DEMIATTA PETROBEL RAS EL HEKMA A /QIR/A QIR W MED GAS SHELL TEMSAH ON/OFFSHORE SHELL MANZALAPETROTTEMSAH APACHE EGPC EL WASTANI TAO ABU MADI W CENTURION NIDOCO RESTRICTED SHELL RASKANAYES KAMOSE AREA APACHE Restricted EL QARAA UMBARKA OBAIYED WEST MEDITERRANEAN Area NIDOCO KHALDA BAPETCO APACHE ALEXANDRIA N.ALEX ABU MADI MATRUH EL bp EGPC APACHE bp QANTARA KHEPRI/SETHOS TAREK HAMRA SIDI IEOC KHALDA KRIER ELQANTARA KHALDA KHALDA W.MED ELQANTARA KHALDA APACHE EL MANSOURA N. ALAMEINAKIK MERLON MELIHA NALPETCO KHALDA OFFSET AGIBA APACHE KALABSHA KHALDA/ KHALDA WEST / SALLAM CAIRO KHALDA KHALDA GIZA 0 100 km Up Stream Activities (Agreements) APACHE / KHALDA CENTURION IEOC / PETROBEL -

The Struggle for Worker Rights in EGYPT AREPORTBYTHESOLIDARITYCENTER
67261_SC_S3_R1_Layout 1 2/5/10 6:58 AM Page 1 I JUSTICE I JUSTICE for ALL for I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I “This timely and important report about the recent wave of labor unrest in Egypt, the country’s largest social movement ALL The Struggle in more than half a century, is essential reading for academics, activists, and policy makers. It identifies the political and economic motivations behind—and the legal system that enables—the government’s suppression of worker rights, in a well-edited review of the country’s 100-year history of labor activism.” The Struggle for Worker Rights Sarah Leah Whitson Director, Middle East and North Africa Division, Human Rights Watch I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I for “This is by far the most comprehensive and detailed account available in English of the situation of Egypt’s working people Worker Rights today, and of their struggles—often against great odds—for a better life. Author Joel Beinin recounts the long history of IN EGYPT labor activism in Egypt, including lively accounts of the many strikes waged by Egyptian workers since 2004 against declining real wages, oppressive working conditions, and violations of their legal rights, and he also surveys the plight of A REPORT BY THE SOLIDARITY CENTER women workers, child labor and Egyptian migrant workers abroad. -

Water & Waste-Water Equipment & Works
Water & Waste-Water Equipment & Works Sector - Q4 2018 Report Water & Waste-Water Equipment & Works 4 (2018) Report American Chamber of Commerce in Egypt - Business Information Center 1 of 15 Water & Waste-Water Equipment & Works Sector - Q4 2018 Report Special Remarks The Water & Waste-Water Equipment & Works Q4 2018 report provides a comprehensive overview of the Water & List of sub-sectors Waste-Water Equipment & Works sector with focus on top tenders, big projects and important news. Irrigation & Drainage Canals Irrigation & Drainage Networks Tenders Section Irrigation & Drainage Pumping Stations Potable Water & Waste-Water Pipelines - Integrated Jobs (Having a certain engineering component) - sorted by Potable Water & Waste-Water Pumps - Generating Sector (the sector of the client who issued the tender and who would pay for the goods & services ordered) Water Desalination Stations - Client Water Wells Drilling - Supply Jobs - Generating Sector - Client Non-Tenders Section - Business News - Projects Awards - Projects in Pre-Tendering Phase - Privatization and Investments - Published Co. Performance - Loans & Grants - Fairs and Exhibitions This report includes tenders with bid bond greater than L.E. 10,000 and valuable tenders without bid bond Tenders may be posted under more than one sub-sector Copyright Notice Copyright ©2018, American Chamber of Commerce in Egypt (AmCham). All rights reserved. Neither the content of the Tenders Alert Service (TAS) nor any part of it may be reproduced, sorted in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior written permission of the American Chamber of Commerce in Egypt. In no event shall AmCham be liable for any special, indirect or consequential damages or any damages whatsoever resulting from loss of use, data or profits. -

Hydrogeological and Water Quality Characteristics of the Saturated Zone Beneath the Various Land Uses in the Nile Delta Region, Egypt
Freshwater Contamination (Proceedings of Rabat Symposium S4, April-May 1997). IAHS Publ. no. 243, 1997 255 Hydrogeological and water quality characteristics of the saturated zone beneath the various land uses in the Nile Delta region, Egypt ISMAIL MAHMOUD EL RAMLY PO Box 5118, Heliopolis West, Cairo, Egypt Abstract The Nile Delta saturated zone lies beneath several land uses which reflect variations in the aquifer characteristics within the delta basin. The present study investigates the scattered rural and urban areas and their environmental impacts on the water quality of the underlying semi-confined and unconfined aquifer systems. The agricultural and industrial activities also affect the groundwater quality located close to the agricultural lands and the various industrial sites, which have started to expand during the last three decades. INTRODUCTION It is believed that the population increase and its direct relation to the expansion of the rural and urban areas in Egypt during the last 30 years has affected the demand for additional water supplies to cover the need of the inhabitants in both areas, which in turn has many consequences for aquifer pollution through the effects of municipal wastewater effluent. The construction of the High Dam caused agricultural expansion by changing the basin irrigation system into a perennial irrigation system. Increase in the application of fertilizers and pesticides has caused the pollution of the surface water bodies which are connected with the aquifer systems in the Nile Delta basin. Industrial activities have much affected the groundwater system below the Nile Delta region due to the increase of the industrial waste effluent dumped into the river without any treatment. -

Mapping of Schistosoma Mansoni in the Nile Delta, Egypt: Assessment
Acta Tropica 167 (2017) 9–17 Contents lists available at ScienceDirect Acta Tropica jo urnal homepage: www.elsevier.com/locate/actatropica Mapping of Schistosoma mansoni in the Nile Delta, Egypt: Assessment of the prevalence by the circulating cathodic antigen urine assay a a b c Ayat A. Haggag , Amal Rabiee , Khaled M. Abd Elaziz , Albis F. Gabrielli , d e,∗ Rehab Abdel Hay , Reda M.R. Ramzy a Ministry of Health and Population, Cairo, Egypt b Department of Community, Environmental, and Occupational Medicine, Faculty of Medicine, Ain Shams University, Egypt c Regional Advisor for Neglected Tropical Diseases, Department of Communicable Disease Prevention and Control, WHO/EMRO, Cairo, Egypt d Department of Public Health, Faculty of Medicine, Cairo University, Egypt e National Nutrition Institute, General Organisation for Teaching Hospitals and Institutes, Cairo, Egypt a r t i c l e i n f o a b s t r a c t Article history: In line with WHO recommendations on elimination of schistosomiasis, accurate identification of all areas Received 3 September 2016 of residual transmission is a key step to design and implement measures aimed at interrupting transmis- Received in revised form sion in low-endemic settings. To this purpose, we assessed the prevalence of active S. mansoni infection 18 November 2016 in five pilot governorates in the Nile Delta of Egypt by examining schoolchildren (6–15 years) using the Accepted 27 November 2016 Urine-Circulating Cathodic Antigen (Urine-CCA) cassette test; we also carried out the standard Kato- Available online 11 December 2016 Katz (KK) thick smear, the monitoring and evaluation tool employed by Egypt’s national schistosomiasis control programme. -

Egypt 2015 International Religious Freedom Report
EGYPT 2015 INTERNATIONAL RELIGIOUS FREEDOM REPORT Executive Summary The constitution describes freedom of belief as “absolute” but only provides adherents of Islam, Christianity, and Judaism the right to practice their religion freely and to build houses of worship. The government does not recognize conversion from Islam by citizens born Muslim to any other religion and imposes legal penalties on Muslim-born citizens who convert. While there is no legal ban on efforts to proselytize Muslims, the government uses the penal code’s prohibition of “denigrating religions” to prosecute those who proselytize publicly, often adopting an overly expansive interpretation of denigration, according to human rights groups. The constitution specifies Islam as the state religion and the principles of sharia as the primary source of legislation. It requires parliament to pass a law on the construction and renovation of Christian churches and provides for the establishment of an antidiscrimination commission, both of which had yet to be completed by year’s end. The government failed to respond to or prevent sectarian violence in some cases, in particular outside of major cities, according to rights advocates. Government officials frequently participated in informal “reconciliation sessions” to address incidents of sectarian violence and tension, saying such sessions prevented further violence. Such sessions, however, regularly led to outcomes unfavorable to minority parties, and precluded recourse to the judicial system in most cases, according to human rights groups. Some religious minorities reported an increase in harassment by government entities as compared with last year. Some government entities used anti-Shia, anti-Bahai, and anti- atheist rhetoric, and the government regularly failed to condemn anti-Semitic commentary. -

Oreochromis Niloticus) in Egypt
EgypL J. AquaL BioL & Fis/L, Vol. 9, Afe /: 81 - 96 (2005) ISSN II10 -6131 BIOCHEMICAL AND HISTOPATHOLOGICAL STUDIES ON THE MUSCLES OF THE NILE TILAPIA (OREOCHROMIS NILOTICUS) IN EGYPT Sabry S. El-Serafy1; Seham A. Ibrahim1 and Soaad A. Mahmoud2 1-Department of Zoology, Faculty of Science, Zagazig University, Benha Branch 2-National Institute of Oceanography and Fisheries, Fish Research station, Cairo, Egypt Key words: River Nile, tilapia. heavy metals, biochemical analysis, histopathology. ABSTRACT iochemical contents in the muscle of Oreochromis niloticus Bwere determined in fish specimens collected from El-Kanater, Benha, Zefta and Talkha stations. Analysis revealed that the water content in muscles was higher in immature than mature fish. The maximum values of protein content in fish flesh were recorded during spring at Benha and Zefta stations. Seasonal variations in the amount of protein, fat. carbohydrate water and ash were observed. The fat in fish muscles was fairly high in winter and early spring in adult specimens, i.e.. during the pre-spawning months, then it dropped after the breeding season. A direct relationship between fat and protein was found. The muscle carbohydrate was correlated to feeding and spawning activity. High energy values were found throughout the prespawning period. Heavy metals concentrations were detected in the muscles of O.niloticus and found to follow the order: Fe > Pb > Cu > Zn. The histopathological study of fish muscles showed marked signs of haemorrhage and hemolysis. INTRODUCTION In Egypt several studies have been reported on the biochemical constituents of the Egyptian fishes among them. El-Saby (1934) determined the dietetic value of some Egyptian food fishes and Latif & Fouda (1976) reported the biochemical constituents of most Red sea fishes in Egypt. -

Egypt – Cairo Outskirts
©Lonely Planet Publications Pty Ltd Cairo Outskirts & the Delta Why Go? Desert Environs .............148 Typical Egypt itineraries rarely take in the area right Saqqara, Memphis & around Cairo because little of it can honestly be put in Dahshur .........................148 the ‘must-see’ category. But with the exception of the an- Al-Fayoum .....................157 cient site of Saqqara, which lies on the city’s southern Wadi Natrun ................. 163 edge, virtually no tourists visit, and this alone can be The Nile Delta ................165 a draw. Thanks to speedy microbuses and good trains through the Delta, it’s easy to get from Cairo’s confi nes to Birqash Camel Market ..165 open green fi elds; ancient sites you’ll have all to yourself; Nile Barrages ................166 modern Coptic monasteries with roots 17 centuries deep; Tanta ............................. 166 and the only-in-Africa action of a live camel market. Zagazig & Bubastis .......167 Just as important, if not more so, these spots are places Tanis ..............................167 to meet Egyptians who will marvel that you made the journey to their overlooked corner of the country. Every destination in this chapter can be visited as an easy day Top Tips trip or a leisurely overnight excursion from the capital. » Microbuses and trains are the best way to travel just outside of Cairo. » See p 92 for recommended When to Go tour guides and drivers for Medinat al Fayoum day trips. °C/°F Te m p Rainfall inches/mm 50/122 2.4/60 2.0/50 Best Reads 40/104 1.6/40 30/86 » The Fayoum: History and 1.2/30 Guide by R Neil Hewison 20/68 0.8/20 » In an Antique Land by 10/50 0.4/10 Amitav Ghosh, about life in a 0/32 0 Delta village J FDNOSAJJMAM » Coptic Monasteries by Gawdat Gabra Dec–Feb The Jun–Aug Sum- Oct The moulid best time to mer heat can be (saints’ festival) visit shadeless paralysing. -

A Guide to the Nile Delta's Oil and Gas
RESEARCH & ANALYSIS A GUIDE TO THE NILE DELTA’S OIL AND GAS RESOURCES BY AMINA HUSSIEN, REHAM GAMAL & TASNEEM MADI The Nile Delta is one of the oldest petroleum production areas. The region witnessed EGPC AND EGAS 2018 BID ROUNDS’ the first natural gas discovery in 1967, the Abu Madi field. Since then and until the RESULTS FOR THE NILE DELTA end of Fiscal Year (FY) 2018/19, the region has achieved 173 discoveries in addition to drilling 387 wells with success rate of 45%. In FY 2018/19, the region’s petroleum production recorded about 89.5 million barrels (mmbbl), representing 16% of Company Blocks Signature Bonus Minimum Financial Exploratory Wells Area (km2) Egypt’s total petroleum production, according to the Egyptian Natural Gas Holding ($ million) Commitment ($ million) Company’s (EGAS) and the Egyptian General Petroleum Corporation’s (EGPC) data. East Damanhur Wintershall Dea Onshore- 11 43 8 1,418 The Nile Delta went through notable changes and updates during FYs 2017/18 Block (10) and 2018/19 covering different aspects, such as bid rounds, agreements, and West Sherbean production rates. IEOC/ BP Onshore- 5 28 4 1,535 Block (11) Bid Rounds In 2018, the EGAS launched an international bid round, which offered 16 blocks; three of which were onshore blocks that are located in the Nile Delta, according to Active Agreements the EGAS Annual Report 2017/18. Since the late 1960s, many International Oil Companies (IOCs) have signed agreements to exploit different concessions in the Nile Delta. Until June 2019, the EGAS INTERNATIONAL region reached five active agreements to develop five concessions by Dana Gas, Eni, the EGPC, IPR, SDX, BP and Edison.