A Novel Coding Architecture for Multi-Line Lidar Point Clouds
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Package 'Brotli'
Package ‘brotli’ May 13, 2018 Type Package Title A Compression Format Optimized for the Web Version 1.2 Description A lossless compressed data format that uses a combination of the LZ77 algorithm and Huffman coding. Brotli is similar in speed to deflate (gzip) but offers more dense compression. License MIT + file LICENSE URL https://tools.ietf.org/html/rfc7932 (spec) https://github.com/google/brotli#readme (upstream) http://github.com/jeroen/brotli#read (devel) BugReports http://github.com/jeroen/brotli/issues VignetteBuilder knitr, R.rsp Suggests spelling, knitr, R.rsp, microbenchmark, rmarkdown, ggplot2 RoxygenNote 6.0.1 Language en-US NeedsCompilation yes Author Jeroen Ooms [aut, cre] (<https://orcid.org/0000-0002-4035-0289>), Google, Inc [aut, cph] (Brotli C++ library) Maintainer Jeroen Ooms <[email protected]> Repository CRAN Date/Publication 2018-05-13 20:31:43 UTC R topics documented: brotli . .2 Index 4 1 2 brotli brotli Brotli Compression Description Brotli is a compression algorithm optimized for the web, in particular small text documents. Usage brotli_compress(buf, quality = 11, window = 22) brotli_decompress(buf) Arguments buf raw vector with data to compress/decompress quality value between 0 and 11 window log of window size Details Brotli decompression is at least as fast as for gzip while significantly improving the compression ratio. The price we pay is that compression is much slower than gzip. Brotli is therefore most effective for serving static content such as fonts and html pages. For binary (non-text) data, the compression ratio of Brotli usually does not beat bz2 or xz (lzma), however decompression for these algorithms is too slow for browsers in e.g. -

Compresso: Efficient Compression of Segmentation Data for Connectomics
Compresso: Efficient Compression of Segmentation Data For Connectomics Brian Matejek, Daniel Haehn, Fritz Lekschas, Michael Mitzenmacher, Hanspeter Pfister Harvard University, Cambridge, MA 02138, USA bmatejek,haehn,lekschas,michaelm,[email protected] Abstract. Recent advances in segmentation methods for connectomics and biomedical imaging produce very large datasets with labels that assign object classes to image pixels. The resulting label volumes are bigger than the raw image data and need compression for efficient stor- age and transfer. General-purpose compression methods are less effective because the label data consists of large low-frequency regions with struc- tured boundaries unlike natural image data. We present Compresso, a new compression scheme for label data that outperforms existing ap- proaches by using a sliding window to exploit redundancy across border regions in 2D and 3D. We compare our method to existing compression schemes and provide a detailed evaluation on eleven biomedical and im- age segmentation datasets. Our method provides a factor of 600-2200x compression for label volumes, with running times suitable for practice. Keywords: compression, encoding, segmentation, connectomics 1 Introduction Connectomics|reconstructing the wiring diagram of a mammalian brain at nanometer resolution|results in datasets at the scale of petabytes [21,8]. Ma- chine learning methods find cell membranes and create cell body labelings for every neuron [18,12,14] (Fig. 1). These segmentations are stored as label volumes that are typically encoded in 32 bits or 64 bits per voxel to support labeling of millions of different nerve cells (neurons). Storing such data is expensive and transferring the data is slow. To cut costs and delays, we need compression methods to reduce data sizes. -
Data Latency and Compression
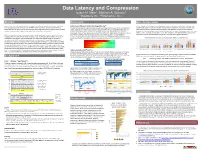
Data Latency and Compression Joseph M. Steim1, Edelvays N. Spassov2 1Quanterra Inc., 2Kinemetrics, Inc. Abstract DIscussion More Compression Because of interest in the capability of digital seismic data systems to provide low-latency data for “Early Compression and Latency related to Origin Queuing[5] Lossless Lempel-Ziv (LZ) compression methods (e.g. gzip, 7zip, and more recently “brotli” introduced by Warning” applications, we have examined the effect of data compression on the ability of systems to Plausible data compression methods reduce the volume (number of bits) required to represent each data Google for web-page compression) are often used for lossless compression of binary and text files. How deliver data with low latency, and on the efficiency of data storage and telemetry systems. Quanterra Q330 sample. Compression of data therefore always reduces the minimum required bandwidth (bits/sec) for does the best example of modern LZ methods compare with FDSN Level 1 and 2 for waveform data? systems are widely used in telemetered networks, and are considered in particular. transmission compared with transmission of uncompressed data. The volume required to transmit Segments of data representing up to one month of various levels of compressibility were compressed using compressed data is variable, depending on characteristics of the data. Higher levels of compression require Levels 1,2 and 3, and brotli using “quality” 1 and 6. The compression ratio (relative to the original 32 bits) Q330 data acquisition systems transmit data compressed in Steim2-format packets. Some studies have less minimum bandwidth and volume, and maximize the available unused (“free”) bandwidth for shows that in all cases the compression using L1,L2, or L3 is significantly greater than brotli. -

Parquet Data Format Performance
Parquet data format performance Jim Pivarski Princeton University { DIANA-HEP February 21, 2018 1 / 22 What is Parquet? 1974 HBOOK tabular rowwise FORTRAN first ntuples in HEP 1983 ZEBRA hierarchical rowwise FORTRAN event records in HEP 1989 PAW CWN tabular columnar FORTRAN faster ntuples in HEP 1995 ROOT hierarchical columnar C++ object persistence in HEP 2001 ProtoBuf hierarchical rowwise many Google's RPC protocol 2002 MonetDB tabular columnar database “first” columnar database 2005 C-Store tabular columnar database also early, became HP's Vertica 2007 Thrift hierarchical rowwise many Facebook's RPC protocol 2009 Avro hierarchical rowwise many Hadoop's object permanance and interchange format 2010 Dremel hierarchical columnar C++, Java Google's nested-object database (closed source), became BigQuery 2013 Parquet hierarchical columnar many open source object persistence, based on Google's Dremel paper 2016 Arrow hierarchical columnar many shared-memory object exchange 2 / 22 What is Parquet? 1974 HBOOK tabular rowwise FORTRAN first ntuples in HEP 1983 ZEBRA hierarchical rowwise FORTRAN event records in HEP 1989 PAW CWN tabular columnar FORTRAN faster ntuples in HEP 1995 ROOT hierarchical columnar C++ object persistence in HEP 2001 ProtoBuf hierarchical rowwise many Google's RPC protocol 2002 MonetDB tabular columnar database “first” columnar database 2005 C-Store tabular columnar database also early, became HP's Vertica 2007 Thrift hierarchical rowwise many Facebook's RPC protocol 2009 Avro hierarchical rowwise many Hadoop's object permanance and interchange format 2010 Dremel hierarchical columnar C++, Java Google's nested-object database (closed source), became BigQuery 2013 Parquet hierarchical columnar many open source object persistence, based on Google's Dremel paper 2016 Arrow hierarchical columnar many shared-memory object exchange 2 / 22 Developed independently to do the same thing Google Dremel authors claimed to be unaware of any precedents, so this is an example of convergent evolution. -

The Deep Learning Solutions on Lossless Compression Methods for Alleviating Data Load on Iot Nodes in Smart Cities
sensors Article The Deep Learning Solutions on Lossless Compression Methods for Alleviating Data Load on IoT Nodes in Smart Cities Ammar Nasif *, Zulaiha Ali Othman and Nor Samsiah Sani Center for Artificial Intelligence Technology (CAIT), Faculty of Information Science & Technology, University Kebangsaan Malaysia, Bangi 43600, Malaysia; [email protected] (Z.A.O.); [email protected] (N.S.S.) * Correspondence: [email protected] Abstract: Networking is crucial for smart city projects nowadays, as it offers an environment where people and things are connected. This paper presents a chronology of factors on the development of smart cities, including IoT technologies as network infrastructure. Increasing IoT nodes leads to increasing data flow, which is a potential source of failure for IoT networks. The biggest challenge of IoT networks is that the IoT may have insufficient memory to handle all transaction data within the IoT network. We aim in this paper to propose a potential compression method for reducing IoT network data traffic. Therefore, we investigate various lossless compression algorithms, such as entropy or dictionary-based algorithms, and general compression methods to determine which algorithm or method adheres to the IoT specifications. Furthermore, this study conducts compression experiments using entropy (Huffman, Adaptive Huffman) and Dictionary (LZ77, LZ78) as well as five different types of datasets of the IoT data traffic. Though the above algorithms can alleviate the IoT data traffic, adaptive Huffman gave the best compression algorithm. Therefore, in this paper, Citation: Nasif, A.; Othman, Z.A.; we aim to propose a conceptual compression method for IoT data traffic by improving an adaptive Sani, N.S. -

Key-Based Self-Driven Compression in Columnar Binary JSON
Otto von Guericke University of Magdeburg Department of Computer Science Master's Thesis Key-Based Self-Driven Compression in Columnar Binary JSON Author: Oskar Kirmis November 4, 2019 Advisors: Prof. Dr. rer. nat. habil. Gunter Saake M. Sc. Marcus Pinnecke Institute for Technical and Business Information Systems / Database Research Group Kirmis, Oskar: Key-Based Self-Driven Compression in Columnar Binary JSON Master's Thesis, Otto von Guericke University of Magdeburg, 2019 Abstract A large part of the data that is available today in organizations or publicly is provided in semi-structured form. To perform analytical tasks on these { mostly read-only { semi-structured datasets, Carbon archives were developed as a column-oriented storage format. Its main focus is to allow cache-efficient access to fields across records. As many semi-structured datasets mainly consist of string data and the denormalization introduces redundancy, a lot of storage space is required. However, in Carbon archives { besides a deduplication of strings { there is currently no compression implemented. The goal of this thesis is to discuss, implement and evaluate suitable compression tech- niques to reduce the amount of storage required and to speed up analytical queries on Carbon archives. Therefore, a compressor is implemented that can be configured to apply a combination of up to three different compression algorithms to the string data of Carbon archives. This compressor can be applied with a different configuration per column (per JSON object key). To find suitable combinations of compression algo- rithms for each column, one manual and two self-driven approaches are implemented and evaluated. On a set of ten publicly available semi-structured datasets of different kinds and sizes, the string data can be compressed down to about 53% on average, reducing the whole datasets' size by 20%. -

Session Overhead Reduction in Adaptive Streaming
Session Overhead Reduction in Adaptive Streaming A Technical Paper prepared for SCTE•ISBE by Alexander Giladi Fellow Comcast 1899 Wynkoop St., Denver CO +1 (215) 581-7118 [email protected] © 2020 SCTE•ISBE and NCTA. All rights reserved. 1 Table of Contents Title Page Number 1. Introduction .......................................................................................................................................... 3 2. Session overhead and HTTP compression ........................................................................................ 4 3. Reducing traffic overhead ................................................................................................................... 5 3.1. MPD patch .............................................................................................................................. 6 3.2. Segment Gap Signaling ......................................................................................................... 7 3.3. Efficient multi-DRM signaling ................................................................................................. 8 4. Reducing the number of HTTP requests ............................................................................................ 9 4.1. Asynchronous MPD updates.................................................................................................. 9 4.2. Predictive templates ............................................................................................................. 10 4.3. Timeline extension .............................................................................................................. -

Context-Aware Encoding & Delivery in The
Context-Aware Encoding & Delivery in the Web ICWE 2020 Benjamin Wollmer, Wolfram Wingerath, Norbert Ritter Universität Hamburg 9 - 12 June, 2020 Business Impact of Page Speed Business Uplift Speed Speed Downlift Uplift Business Downlift Felix Gessert: Mobile Site Speed and the Impact on E-Commerce, CodeTalks 2019 So Far On Compression… GZip SDCH Deflate Delta Brotli Encoding GZIP/Deflate – The De Facto Standard in the Web Encoding Size None 200 kB Gzip ~36 kB This example text is used to show how LZ77 finds repeating elements in the example[70;14] text ~81.9% saved data J. Alakuijala, E. Kliuchnikov, Z. Szabadka, L. Vandevenne: Comparison of Brotli, Deflate, Zopfli, LZMA, LZHAM and Bzip2 Compression Algorithms, 2015 Delta Encoding – Updating Stale Content Encoding Size None 200 kB Gzip ~36 kB Delta Encoding ~34 kB 83% saved data J. C. Mogul, F. Douglis, A. Feldmann, B. Krishnamurthy: Potential Benefits of Delta Encoding and Data Compression for HTTP, 1997 SDCH – Reusing Dictionaries Encoding Size This is an example None 200 kB Gzip ~36 kB Another example Delta Encoding ~34 kB SDCH ~7 kB Up to 81% better results (compared to gzip) O. Shapira: Shared Dictionary Compression for HTTP at LinkedIn, 2015 Brotli – SDCH for Everyone Encoding Size None 200 kB Gzip ~36 kB Delta Encoding ~34 kB SDCH ~7 kB Brotli ~29 kB ~85.6% saved data J. Alakuijala, E. Kliuchnikov, Z. Szabadka, L. Vandevenne: Comparison of Brotli, Deflate, Zopfli, LZMA, LZHAM and Bzip2 Compression Algorithms, 2015 So Far On Compression… Theory vs. Reality GZip (~80%) SDCH Deflate -

Compression: Putting the Squeeze on Storage
Compression: Putting the Squeeze on Storage Live Webcast September 2, 2020 11:00 am PT 1 | ©2020 Storage Networking Industry Association. All Rights Reserved. Today’s Presenters Ilker Cebeli John Kim Brian Will Moderator Chair, SNIA Networking Storage Forum Intel® QuickAssist Technology Samsung NVIDIA Software Architect Intel 2 | ©2020 Storage Networking Industry Association. All Rights Reserved. SNIA-At-A-Glance 3 3 | ©2020 Storage Networking Industry Association. All Rights Reserved. NSF Technologies 4 4 | ©2020 Storage Networking Industry Association. All Rights Reserved. SNIA Legal Notice § The material contained in this presentation is copyrighted by the SNIA unless otherwise noted. § Member companies and individual members may use this material in presentations and literature under the following conditions: § Any slide or slides used must be reproduced in their entirety without modification § The SNIA must be acknowledged as the source of any material used in the body of any document containing material from these presentations. § This presentation is a project of the SNIA. § Neither the author nor the presenter is an attorney and nothing in this presentation is intended to be, or should be construed as legal advice or an opinion of counsel. If you need legal advice or a legal opinion please contact your attorney. § The information presented herein represents the author's personal opinion and current understanding of the relevant issues involved. The author, the presenter, and the SNIA do not assume any responsibility or liability for damages arising out of any reliance on or use of this information. NO WARRANTIES, EXPRESS OR IMPLIED. USE AT YOUR OWN RISK. 5 | ©2020 Storage Networking Industry Association. -

An Inter-Data Encoding Technique That Exploits Synchronized Data for Network Applications
1 An Inter-data Encoding Technique that Exploits Synchronized Data for Network Applications Wooseung Nam, Student Member, IEEE, Joohyun Lee, Member, IEEE, Ness B. Shroff, Fellow, IEEE, and Kyunghan Lee, Member, IEEE Abstract—In a variety of network applications, there exists significant amount of shared data between two end hosts. Examples include data synchronization services that replicate data from one node to another. Given that shared data may have high correlation with new data to transmit, we question how such shared data can be best utilized to improve the efficiency of data transmission. To answer this, we develop an inter-data encoding technique, SyncCoding, that effectively replaces bit sequences of the data to be transmitted with the pointers to their matching bit sequences in the shared data so called references. By doing so, SyncCoding can reduce data traffic, speed up data transmission, and save energy consumption for transmission. Our evaluations of SyncCoding implemented in Linux show that it outperforms existing popular encoding techniques, Brotli, LZMA, Deflate, and Deduplication. The gains of SyncCoding over those techniques in the perspective of data size after compression in a cloud storage scenario are about 12.5%, 20.8%, 30.1%, and 66.1%, and are about 78.4%, 80.3%, 84.3%, and 94.3% in a web browsing scenario, respectively. Index Terms—Source coding; Data compression; Encoding; Data synchronization; Shared data; Reference selection F 1 INTRODUCTION are capable of exploiting previously stored or delivered URING the last decade, cloud-based data synchroniza- data for storing or transmitting new data. However, they D tion services for end-users such as Dropbox, OneDrive, mostly work at the level of files or chunks of a fixed and Google Drive have attracted a huge number of sub- size (e.g., 4MB in Dropbox, 8kB in Neptune [4]), which scribers. -
I Came to Drop Bombs Auditing the Compression Algorithm Weapons Cache
I Came to Drop Bombs Auditing the Compression Algorithm Weapons Cache Cara Marie NCC Group Blackhat USA 2016 About Me • NCC Group Senior Security Consultant Pentested numerous networks, web applications, mobile applications, etc. • Hackbright Graduate • Ticket scalper in a previous life • @bones_codes | [email protected] What is a Decompression Bomb? A decompression bomb is a file designed to crash or render useless the program or system reading it. Vulnerable Vectors • Chat clients • Image hosting • Web browsers • Web servers • Everyday web-services software • Everyday client software • Embedded devices (especially vulnerable due to weak hardware) • Embedded documents • Gzip’d log uploads A History Lesson early 90’s • ARC/LZH/ZIP/RAR bombs were used to DoS FidoNet systems 2002 • Paul L. Daniels publishes Arbomb (Archive “Bomb” detection utility) 2003 • Posting by Steve Wray on FullDisclosure about a bzip2 bomb antivirus software DoS 2004 • AERAsec Network Services and Security publishes research on the various reactions of antivirus software against decompression bombs, includes a comparison chart 2014 • Several CVEs for PIL are issued — first release July 2010 (CVE-2014-3589, CVE-2014-3598, CVE-2014-9601) 2015 • CVE for libpng — first release Aug 2004 (CVE-2015-8126) Why Are We Still Talking About This?!? Why Are We Still Talking About This?!? Compression is the New Hotness Who This Is For Who This Is For The Archives An archive bomb, a.k.a. zip bomb, is often employed to disable antivirus software, in order to create an opening for more traditional viruses • Singly compressed large file • Self-reproducing compressed files, i.e. Russ Cox’s Zips All The Way Down • Nested compressed files, i.e. -

Session Title Speaker Name Speaker Title & Company
Shrinking Data for Fun & Profit Dietmar Hauser Head of Programming @ Sproing Why shrink data? Money! Reduce bandwidth costs Initial download / updates Continuous connections Expand reach Decreased loading times Smaller app size Why is it fun? A history of neglect + More use cases every day + A recent „Gold rush“ Why is now a good time? CPU / Memory gap Fidelity / Bandwidth gap Hi res displays versus bandwidth & storage What is data compression? Wikipedia: „[...] encoding information using fewer bits than the original representation“ Two flavours of compression Lossless All information is retained Lossy An approximation is retained History & Concepts Information Theory, ~1948 Claude Shannon Entropy Shannon limit History & Concepts Prefix code, ~1952 Variable length code Translated with a dictionary Constructed with Huffman tree Fast and efficient Still used today History & Concepts Lempel-Ziv, 1977 Base for the LZ-family Refers back to already processed data „Sliding Window“ Implicit dictionary creation History & Concepts Deflate, 1991 LZ77 + Huffman Used everywhere! http://zlib.net 25 years old! Compression In Practice 1 Reducing Network Traffic Reducing Network Traffic HTTP 1.1 has compression built in Likely already available to you Only GZIP widely supported Google is pushing BROTLI Hardware support available Just turn it on! Reducing Network Traffic A closer look at the data HTML, JSON, XML,… compress well Human readable low entropy Different from data in memory Conversion wastes CPU / memory Reducing Network Traffic Data treatment options Omit whitespace and comments Separate static from dynamic data Transfer static data once (or never) i.e. replace Strings with IDs Reducing Network Traffic Use binary data formats i.e.