Movement and Space Use by the Green Hermit (Phaethornis Guy) in a Fragmented Landscape in Costa Rica
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Redalyc.Monocotiledóneas Y Pteridófitos De La Planada, Colombia
Biota Colombiana ISSN: 0124-5376 [email protected] Instituto de Investigación de Recursos Biológicos "Alexander von Humboldt" Colombia Ramírez Padilla, Bernardo; Mendoza Cifuentes, Humberto Monocotiledóneas y Pteridófitos de La Planada, Colombia Biota Colombiana, vol. 3, núm. 2, diciembre, 2002, pp. 285-295 Instituto de Investigación de Recursos Biológicos "Alexander von Humboldt" Bogotá, Colombia Available in: http://www.redalyc.org/articulo.oa?id=49103204 How to cite Complete issue Scientific Information System More information about this article Network of Scientific Journals from Latin America, the Caribbean, Spain and Portugal Journal's homepage in redalyc.org Non-profit academic project, developed under the open access initiative BiotaRamírez-P Colombiana & Mendoza-C 3 (2) 285 - 295, 2002 Monocots and Fern-allies of La Planada, Colombia -285 Monocotiledóneas y Pteridófitos de La Planada, Colombia Bernardo Ramírez-Padilla1 y Humberto Mendoza-Cifuentes2 1 Universidad del Cauca, Herbario CAUP, A.A. 1113, Popayán, Colombia. [email protected] 2 Instituto Alexander von Humboldt, A.A. 8693 Bogotá D.C., Colombia. [email protected] Palabras Clave: Flora, Bosque Nublado, Los Andes, Colombia, Lista de Especies La Planada es una reserva natural privada y un centro La mayoría de los registros del presente listado provienen de de investigación biológica de gran importancia en Colom- colecciones realizadas en la altiplanicie de la Reserva entre bia. Se localiza en la vertiente Pacífica de Los Andes colom- los 1800-1900 m de altitud. En esta área se encuentra vegeta- bianos, Municipio de Ricaurte, departamento de Nariño, ción de bosque maduro y bosque en avanzado estado de cerca de la frontera con el Ecuador, entre los 1500 y 2100 m, regeneración (más de 15 años). -
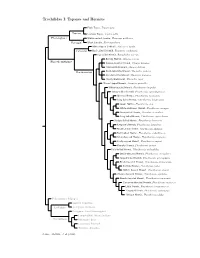
Topazes and Hermits
Trochilidae I: Topazes and Hermits Fiery Topaz, Topaza pyra Topazini Crimson Topaz, Topaza pella Florisuginae White-necked Jacobin, Florisuga mellivora Florisugini Black Jacobin, Florisuga fusca White-tipped Sicklebill, Eutoxeres aquila Eutoxerini Buff-tailed Sicklebill, Eutoxeres condamini Saw-billed Hermit, Ramphodon naevius Bronzy Hermit, Glaucis aeneus Phaethornithinae Rufous-breasted Hermit, Glaucis hirsutus ?Hook-billed Hermit, Glaucis dohrnii Threnetes ruckeri Phaethornithini Band-tailed Barbthroat, Pale-tailed Barbthroat, Threnetes leucurus ?Sooty Barbthroat, Threnetes niger ?Broad-tipped Hermit, Anopetia gounellei White-bearded Hermit, Phaethornis hispidus Tawny-bellied Hermit, Phaethornis syrmatophorus Mexican Hermit, Phaethornis mexicanus Long-billed Hermit, Phaethornis longirostris Green Hermit, Phaethornis guy White-whiskered Hermit, Phaethornis yaruqui Great-billed Hermit, Phaethornis malaris Long-tailed Hermit, Phaethornis superciliosus Straight-billed Hermit, Phaethornis bourcieri Koepcke’s Hermit, Phaethornis koepckeae Needle-billed Hermit, Phaethornis philippii Buff-bellied Hermit, Phaethornis subochraceus Scale-throated Hermit, Phaethornis eurynome Sooty-capped Hermit, Phaethornis augusti Planalto Hermit, Phaethornis pretrei Pale-bellied Hermit, Phaethornis anthophilus Stripe-throated Hermit, Phaethornis striigularis Gray-chinned Hermit, Phaethornis griseogularis Black-throated Hermit, Phaethornis atrimentalis Reddish Hermit, Phaethornis ruber ?White-browed Hermit, Phaethornis stuarti ?Dusky-throated Hermit, Phaethornis squalidus Streak-throated Hermit, Phaethornis rupurumii Cinnamon-throated Hermit, Phaethornis nattereri Little Hermit, Phaethornis longuemareus ?Tapajos Hermit, Phaethornis aethopygus ?Minute Hermit, Phaethornis idaliae Polytminae: Mangos Lesbiini: Coquettes Lesbiinae Coeligenini: Brilliants Patagonini: Giant Hummingbird Lampornithini: Mountain-Gems Tro chilinae Mellisugini: Bees Cynanthini: Emeralds Trochilini: Amazilias Source: McGuire et al. (2014).. -

Ecography ECOG-01538 Maglianesi, M
Ecography ECOG-01538 Maglianesi, M. A., Blüthgen, N., Böhning-Gaese, K. and Schleuning, M. 2015. Topographic microclimates drive microhabitat associations at the range margin of a butterfly. – Ecography doi: 10.1111/ecog.01538 Supplementary material Appendix 1 Table A1. List of families, genera and species of plants recorded by identification of pollen loads carried by hummingbird individuals at three elevations in northeastern Costa Rica. Only plant morphotypes that could be identified to species, genus or family level are given. The proportion of pollen identified to species level was 43% and that identified to a higher taxonomic level was 10%; 47% of pollen grains were categorized into pollen morphotypes (not shown here). Plant families are ordered alphabetically within each elevation. Elevation Family Genus Species Low Bromeliaceae Aechmea Aechmea mariareginae Low Acanthaceae Aphelandra Aphelandra storkii Low Bignoniaceae Arrabidaea Arrabidaea verrucosa Low Gesneraciae Besleria Besleria columnoides Low Alstroemeriaceae Bomarea Bomarea obovata Low Gesneriaceae Columnea Columnea linearis Low Gesneraceae Columnea Columnea nicaraguensis Low Gesneraceae Columnea Columnea purpurata Low Gesneraceae Columnea Columnea querceti Low Costaceae Costus Costus pulverulentus Low Costaceae Costus Costus scaber Low Costaceae Costus Costus sp 1 Low Gesneriaceae Drymonia Drymonia macrophylla Low Ericaceae Ericaceae Ericaceae 1 Low Ericaceae Ericaceae Ericaceae 2 Low Bromeliaceae Guzmania Guzmania monostachia Low Rubiaceae Hamelia Hamelia patens Low Heliconiaceae -

Nesting Behavior of Reddish Hermits (Phaethornis Ruber) and Occurrence of Wasp Cells in Nests
NESTING BEHAVIOR OF REDDISH HERMITS (PHAETHORNIS RUBER) AND OCCURRENCE OF WASP CELLS IN NESTS YOSHIKA ONIKI REDraSHHermits (Phaethornisruber) are small hummingbirdsof the forested tropical lowlands east of the Andes and south of the Orinoco (Meyer de Schauensee,1966: 161). Five birds mist-nettedat Belem (1 ø 28' S, 48ø 27' W, altitude 13 m) weighed2.0 to 2.5 g (average2.24 g). I studiedtheir nestingfrom 14 October1966 to October1967 at Belem, Brazil, in the Area de PesquisasEco16gicas do Guam•t (APEG) and MocamboForest reserves,in the Instituto de Pesquisase Experimentaqfio Agropecu•triasdo Norte (IPEAN). Names of forest types used and the Portugueseequivalents are: tidal swamp forest (vdrze'a), mature upland forest (terra-/irme) and secondgrowth (capoeira). In all casescapo.eira has been in mature upland situations. At Belem Phaethornisruber is commonall year in the lower levels of secondgrowth (capoeira) where thin branchesare plentiful. Isolated males call frequently from thin horizontal branches,never higher than 2.5-3.0 m. The male sits erect and wags his tail forward and backward as he squeaksa seriesof insectlike"pi-pi-pipipipipipi" notes, 18-20 times per minute; the first two or three notesare short and separated,the rest are run togetherrapidly. The bird sometimesstops calling for someseconds and flasheshis tongue in and out several times during the interval. I foundno singingassemblies of malehermits such as Davis (1934) describes for both the Reddishand Long-tailedHermits (Phaethornissuperciliosus). and Snow (1968) for the Little Hermit (P. longuemareus). Breeding season.--The monthly rainfall at Belem in the year of the study was 350 to 550 mm from January to May and 25 to 200 mm from June to December,with lows in October and November and highs in March and April. -

Bulletin Biological Assessment Boletín RAP Evaluación Biológica
Rapid Assessment Program Programa de Evaluación Rápida Evaluación Biológica Rápida de Chawi Grande, Comunidad Huaylipaya, Zongo, La Paz, Bolivia RAP Bulletin A Rapid Biological Assessment of of Biological Chawi Grande, Comunidad Huaylipaya, Assessment Zongo, La Paz, Bolivia Boletín RAP de Evaluación Editores/Editors Biológica Claudia F. Cortez F., Trond H. Larsen, Eduardo Forno y Juan Carlos Ledezma 70 Conservación Internacional Museo Nacional de Historia Natural Gobierno Autónomo Municipal de La Paz Rapid Assessment Program Programa de Evaluación Rápida Evaluación Biológica Rápida de Chawi Grande, Comunidad Huaylipaya, Zongo, La Paz, Bolivia RAP Bulletin A Rapid Biological Assessment of of Biological Chawi Grande, Comunidad Huaylipaya, Assessment Zongo, La Paz, Bolivia Boletín RAP de Evaluación Editores/Editors Biológica Claudia F. Cortez F., Trond H. Larsen, Eduardo Forno y Juan Carlos Ledezma 70 Conservación Internacional Museo Nacional de Historia Natural Gobierno Autónomo Municipal de La Paz The RAP Bulletin of Biological Assessment is published by: Conservation International 2011 Crystal Drive, Suite 500 Arlington, VA USA 22202 Tel: +1 703-341-2400 www.conservation.org Cover Photos: Trond H. Larsen (Chironius scurrulus). Editors: Claudia F. Cortez F., Trond H. Larsen, Eduardo Forno y Juan Carlos Ledezma Design: Jaime Fernando Mercado Murillo Map: Juan Carlos Ledezma y Veronica Castillo ISBN 978-1-948495-00-4 ©2018 Conservation International All rights reserved. Conservation International is a private, non-proft organization exempt from federal income tax under section 501c(3) of the Internal Revenue Code. The designations of geographical entities in this publication, and the presentation of the material, do not imply the expression of any opinion whatsoever on the part of Conservation International or its supporting organizations concerning the legal status of any country, territory, or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. -

Lições Das Interações Planta – Beija-Flor
UNIVERSIDADE ESTADUAL DE CAMPINAS INSTITUTO DE BIOLOGIA JÉFERSON BUGONI REDES PLANTA-POLINIZADOR NOS TRÓPICOS: LIÇÕES DAS INTERAÇÕES PLANTA – BEIJA-FLOR PLANT-POLLINATOR NETWORKS IN THE TROPICS: LESSONS FROM HUMMINGBIRD-PLANT INTERACTIONS CAMPINAS 2017 JÉFERSON BUGONI REDES PLANTA-POLINIZADOR NOS TRÓPICOS: LIÇÕES DAS INTERAÇÕES PLANTA – BEIJA-FLOR PLANT-POLLINATOR NETWORKS IN THE TROPICS: LESSONS FROM HUMMINGBIRD-PLANT INTERACTIONS Tese apresentada ao Instituto de Biologia da Universidade Estadual de Campinas como parte dos requisitos exigidos para a obtenção do Título de Doutor em Ecologia. Thesis presented to the Institute of Biology of the University of Campinas in partial fulfillment of the requirements for the degree of Doctor in Ecology. ESTE ARQUIVO DIGITAL CORRESPONDE À VERSÃO FINAL DA TESE DEFENDIDA PELO ALUNO JÉFERSON BUGONI E ORIENTADA PELA DRA. MARLIES SAZIMA. Orientadora: MARLIES SAZIMA Co-Orientador: BO DALSGAARD CAMPINAS 2017 Campinas, 17 de fevereiro de 2017. COMISSÃO EXAMINADORA Profa. Dra. Marlies Sazima Prof. Dr. Felipe Wanderley Amorim Prof. Dr. Thomas Michael Lewinsohn Profa. Dra. Marina Wolowski Torres Prof. Dr. Vinícius Lourenço Garcia de Brito Os membros da Comissão Examinadora acima assinaram a Ata de Defesa, que se encontra no processo de vida acadêmica do aluno. DEDICATÓRIA À minha família por me ensinar o amor à natureza e a natureza do amor. Ao povo brasileiro por financiar meus estudos desde sempre, fomentando assim meus sonhos. EPÍGRAFE “Understanding patterns in terms of the processes that produce them is the essence of science […]” Levin, S.A. (1992). The problem of pattern and scale in ecology. Ecology 73:1943–1967. AGRADECIMENTOS Manifestar a gratidão às tantas pessoas que fizeram parte direta ou indiretamente do processo que culmina nesta tese não é tarefa trivial. -

Diversity and Levels of Endemism of the Bromeliaceae of Costa Rica – an Updated Checklist
A peer-reviewed open-access journal PhytoKeys 29: 17–62Diversity (2013) and levels of endemism of the Bromeliaceae of Costa Rica... 17 doi: 10.3897/phytokeys.29.4937 CHECKLIST www.phytokeys.com Launched to accelerate biodiversity research Diversity and levels of endemism of the Bromeliaceae of Costa Rica – an updated checklist Daniel A. Cáceres González1,2, Katharina Schulte1,3,4, Marco Schmidt1,2,3, Georg Zizka1,2,3 1 Abteilung Botanik und molekulare Evolutionsforschung, Senckenberg Forschungsinstitut Frankfurt/Main, Germany 2 Institut Ökologie, Evolution & Diversität, Goethe-Universität Frankfurt/Main, Germany 3 Biodive rsität und Klima Forschungszentrum (BiK-F), Frankfurt/Main, Germany 4 Australian Tropical Herbarium & Center for Tropical Biodiversity and Climate Change, James Cook University, Cairns, Australia Corresponding author: Daniel A. Cáceres González ([email protected]) Academic editor: L. Versieux | Received 1 March 2013 | Accepted 28 October 2013 | Published 11 November 2013 Citation: González DAC, Schulte K, Schmidt M, Zizka G (2013) Diversity and levels of endemism of the Bromeliaceae of Costa Rica – an updated checklist. PhytoKeys 29: 17–61. doi: 10.3897/phytokeys.29.4937 This paper is dedicated to the late Harry Luther, a world leader in bromeliad research. Abstract An updated inventory of the Bromeliaceae for Costa Rica is presented including citations of representa- tive specimens for each species. The family comprises 18 genera and 198 species in Costa Rica, 32 spe- cies being endemic to the country. Additional 36 species are endemic to Costa Rica and Panama. Only 4 of the 8 bromeliad subfamilies occur in Costa Rica, with a strong predominance of Tillandsioideae (7 genera/150 spp.; 75.7% of all bromeliad species in Costa Rica). -

Observations of Hummingbird Feeding Behavior at Flowers of Heliconia Beckneri and H
SHORT COMMUNICATIONS ORNITOLOGIA NEOTROPICAL 18: 133–138, 2007 © The Neotropical Ornithological Society OBSERVATIONS OF HUMMINGBIRD FEEDING BEHAVIOR AT FLOWERS OF HELICONIA BECKNERI AND H. TORTUOSA IN SOUTHERN COSTA RICA Joseph Taylor1 & Stewart A. White Division of Environmental and Evolutionary Biology, Graham Kerr Building, University of Glasgow, Glasgow, CB23 6DH, UK. Observaciones de la conducta de alimentación de colibríes con flores de Heliconia beckneri y H. tortuosa en El Sur de Costa Rica. Key words: Pollination, sympatric, cloud forest, Cloudbridge Nature Reserve, Green Hermit, Phaethornis guy, Violet Sabrewing, Campylopterus hemileucurus, Green-crowned Brilliant, Heliodoxa jacula. INTRODUCTION sources in a single foraging bout (Stiles 1978). Interactions between closely related sympatric The flower preferences shown by humming- flowering plants may involve competition for birds (Trochilidae) are influenced by a com- pollinators, interspecific pollen loss and plex array of factors including their bill hybridization (e.g., Feinsinger 1987). These dimensions, body size, habitat preference and processes drive the divergence of genetically relative dominance, as influenced by age and based floral phenotypes that influence polli- sex, and how these interact with the morpho- nator assemblages and behavior. However, logical, caloric and visual properties of flow- floral convergence may be favored if the ers (e.g., Stiles 1976). increased nectar supplies and flower densities, Hummingbirds are the primary pollina- for example, increase the regularity and rate tors of most Heliconia species (Heliconiaceae) of flower visitation for all species concerned (Linhart 1973), which are medium to large (Schemske 1981). Sympatric hummingbird- clone-forming herbs that usually produce pollinated plants probably face strong selec- brightly colored floral bracts (Stiles 1975). -

On the Condors and Humming-Birds of the Equatorial Andes
Annals and Magazine of Natural History Series 4 ISSN: 0374-5481 (Print) (Online) Journal homepage: http://www.tandfonline.com/loi/tnah10 XXI.—On the condors and humming-birds of the Equatorial Andes James Orton To cite this article: James Orton (1871) XXI.—On the condors and humming-birds of the Equatorial Andes , Annals and Magazine of Natural History, 8:45, 185-192, DOI: 10.1080/00222937108696463 To link to this article: http://dx.doi.org/10.1080/00222937108696463 Published online: 16 Oct 2009. Submit your article to this journal Article views: 3 View related articles Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tnah10 Download by: [La Trobe University] Date: 15 June 2016, At: 22:45 Mr. J. Ortou on t£e Condors of the Equatorial Andes. 185 [In the 27th cervical vertebra of PleMosaurus Manselii~ Mr. Hulke gives the measurements as :- From front to back of centrum .......... 2~ inches. Width of centrum .................... 4 ,, Depth of centrum .................... 3~ ,, and in the pectoral region the distinctive proportions of width and depth become slightly more marked. The more concave articular face of the eentrum and less thickened peripheral margin of the Kimmeridge species con- firm the specific distinction of the types.] Pectoral vertebra.--The pectoral vertebra of P. wlns2itensis appears to measure-- From front to back of the centrum " 18 inch. Width of centrum .................... 2-) inches. Depth of centrum .................... 1{ inch. Thus the form of the articular surface of the eentrum is broader from side to side than in the neck; it is also a little flatter. -

Project Scientific Progress Report Study Site
Project Ecology of plant-hummingbird interactions along an elevational gradient Scientific Progress Report Project leader: Catherine Graham, Swiss Federal Research Institute Principal investigator: María Alejandra Maglianesi, Universidad Estatal a Distancia Coordinator: Emanuel Brenes Rodríguez, Universidad Estatal a Distancia Study site Las Nubes Biological Reserve York University San José, Costa Rica January, 2020 1 INTRODUCTION A primary aim of community ecology is to identify the processes that govern species assemblages across environmental gradients (McGill et al. 2006), allowing us to understand why biodiversity is non-randomly distributed on Earth. Mutualistic interactions such as those between plants and their animal pollinators are the major biodiversity component from which the integrity of ecosystems depends (Valiente-Banuet et al. 2015). The interdependence of plant and pollinators can be assessed using a network approach, which is a powerful tool to analyze the complexity of ecological systems (Ings et al. 2009), especially in highly diversified tropical regions. Mountain regions provide pronounced environmental gradients across relatively small spatial scales and have proved to be a suitable model system to investigate patterns and determinants of species diversity and community structure (Körner 2000, Sanders and Rahbek 2012). Although some studies have investigated the variation in plant–pollinator interaction networks across elevational gradients (Ramos-Jiliberto et al. 2010, Benadi et al. 2013), such studies are still scarce, particularly in the tropics. In the Neotropics, hummingbirds (Trochilidae) are considered to be effective pollinators (Castellanos et al. 2003). They have been classified into two distinct groups: hermits and non-hermits, which differ mainly in their elevational distribution and their level of specialization on floral resources, i.e., the proportion of floral resources available in the community that is used by species (Stiles 1978). -

The Behavior and Ecology of Hermit Hummingbirds in the Kanaku Mountains, Guyana
THE BEHAVIOR AND ECOLOGY OF HERMIT HUMMINGBIRDS IN THE KANAKU MOUNTAINS, GUYANA. BARBARA K. SNOW OR nearly three months, 17 January to 5 April 1970, my husband and I F camped at the foot of the Kanaku Mountains in southern Guyana. Our camp was situated just inside the forest beside Karusu Creek, a tributary of Moco Moco Creek, at approximately 80 m above sea level. The period of our visit was the end of the main dry season which in this part of Guyana lasts approximately from September or October to April or May. Although we were both mainly occupied with other observations we hoped to accumulate as much information as possible on the hermit hummingbirds of the area, particularly their feeding niches, nesting and social organization. Previously, while living in Trinidad, we had studied various aspects of the behavior and biology of the three hermit hummingbirds resident there: the breeding season (D. W. Snow and B. K. Snow, 1964)) the behavior at singing assemblies of the Little Hermit (Phaethornis Zonguemareus) (D. W. Snow, 1968)) the feeding niches (B. K. Snow and D. W. Snow, 1972)) the social organization of the Hairy Hermit (Glaucis hirsuta) (B. K. Snow, 1973) and its breeding biology (D. W. Snow and B. K. Snow, 1973)) and the be- havior and breeding of the Guys’ Hermit (Phuethornis guy) (B. K. Snow, in press). A total of six hermit hummingbirds were seen in the Karusu Creek study area. Two species, Phuethornis uugusti and Phaethornis longuemureus, were extremely scarce. P. uugusti was seen feeding once, and what was presumably the same individual was trapped shortly afterwards. -

Trends in Nectar Concentration and Hummingbird Visitation
SIT Graduate Institute/SIT Study Abroad SIT Digital Collections Independent Study Project (ISP) Collection SIT Study Abroad Fall 2016 Trends in Nectar Concentration and Hummingbird Visitation: Investigating different variables in three flowers of the Ecuadorian Cloud Forest: Guzmania jaramilloi, Gasteranthus quitensis, and Besleria solanoides Sophie Wolbert SIT Study Abroad Follow this and additional works at: https://digitalcollections.sit.edu/isp_collection Part of the Animal Studies Commons, Community-Based Research Commons, Environmental Studies Commons, Latin American Studies Commons, and the Plant Biology Commons Recommended Citation Wolbert, Sophie, "Trends in Nectar Concentration and Hummingbird Visitation: Investigating different variables in three flowers of the Ecuadorian Cloud Forest: Guzmania jaramilloi, Gasteranthus quitensis, and Besleria solanoides" (2016). Independent Study Project (ISP) Collection. 2470. https://digitalcollections.sit.edu/isp_collection/2470 This Unpublished Paper is brought to you for free and open access by the SIT Study Abroad at SIT Digital Collections. It has been accepted for inclusion in Independent Study Project (ISP) Collection by an authorized administrator of SIT Digital Collections. For more information, please contact [email protected]. Wolbert 1 Trends in Nectar Concentration and Hummingbird Visitation: Investigating different variables in three flowers of the Ecuadorian Cloud Forest: Guzmania jaramilloi, Gasteranthus quitensis, and Besleria solanoides Author: Wolbert, Sophie Academic