PS Move API Documentation Release 4.0.12
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PS Move API: a Cross-Platform 6Dof Tracking Framework
PS Move API: A Cross-Platform 6DoF Tracking Framework Thomas Perl∗ Benjamin Venditti† Hannes Kaufmann‡ Interactive Media Systems Group University of Technology Vienna ABSTRACT With the introduction of 6DoF motion controllers for game con- soles, low cost hardware for 3D interaction became widely avail- able. However, no fully-featured software solution for 6DoF track- ing exists that takes advantage of the PlayStation (PS) Move Motion Controller without additional hardware. We designed, developed and evaluated a library - the PS Move API - that enables developers to use the PS Move Motion Controller as 6DoF input device in combination with a camera. Initially we solved hardware related problems such as pairing and communi- cation over USB and Bluetooth. In this paper we describe how we perform visual tracking and sensor fusion, combining visual and in- ertial data. Performance results show that multiple controllers can be tracked simultaneously in real time. Figure 1: Interacting with existing applications using the PS Move Developers using the library can choose between a low-level C API or higher-level abstractions in Python, Java, C# or the Pro- cessing framework. The library is open source, has been devel- oped and tested on Windows, Mac OS X and Linux, and is re- The PS Move Controller has been designed to work with the leased under a Simplified BSD License. It also runs on mobile PlayStation 3 (PS3) system and does not automatically pair or Linux distributions such as MeeGo 1.2 Harmattan and Android. work with a normal PC. Therefore our library solves the follow- The full source code is available on the PS Move API website at ing problems: Bluetooth pairing via custom USB HID messages; http://thp.io/2010/psmove/. -

PSP® Go PSP® (PLAYSTATION®PORTABLE) EVOLVES to MATCH the DIGITAL LIFESTYLE
FOR IMMEDIATE RELEASE PSP® go PSP® (PLAYSTATION®PORTABLE) EVOLVES TO MATCH THE DIGITAL LIFESTYLE With an Ultra-Portable Design and Digital Content Focus, PSPgo to Hit the Worldwide Market This Fall, Further Enhancing the User Experience Along with PSP-3000 Tokyo, June 3, 2009 - Sony Computer Entertainment Inc. (SCEI) today unveiled PSP® (PlayStation®Portable) go (PSP-N1000), a new evolution of PSP handheld entertainment system, specifically designed to suit the digital lifestyle of consumers who enjoy downloadable content on the go. PSPgo will become available in stores on October 1, 2009, in North America, Europe/ PAL territories and Asian countries and regions at a recommended retail price (RRP) of US$249 and €249, and on November 1, 2009, in Japan at a RRP of 26,800 yen (including tax). With both the existing PSP-3000 and new PSPgo, the company will further enhance the ultimate gaming and entertainment experiences on the go while providing consumers with the opportunity to choose the PSP system that’s right for them. PSPgo is ideal for today’s on-the move consumers who prefer not to carry around disc-based content and are looking for on-demand entertainment. With the steady expansion of broadband network infrastructure, the number of users who download and enjoy digital entertainment content has been increasing remarkably. To address this growing trend, PSPgo replaces the UMD drive*1 with 16GB of flash memory to store a variety of digital entertainment content, offering users unlimited possibilities of portable digital entertainment delivered through PlayStation®Network. PSPgo, smaller and lighter than ever with a sophisticated design featuring an easy sliding display panel, is truly pocket-sized and can be taken everywhere. -

(CECH-ZDC1U) English/French/Spanish Instruction Manual
Charging Ce produit a été testé et il a été déterminé qu’il se conforme aux normes stipulées par l’article 15 des règlements Specifications de la FCC pour un appareil numérique de catégorie B. Ces normes sont établies afin d’offrir une protection raisonnable contre toute possibilité de brouillage préjudiciable dans une installation résidentielle. Cet appareil 1 Insert the charging adaptor into the USB connector on the DUALSHOCK®3/SIXAXIS® Input Charging station: DC 5 V produit, utilise et peut émettre une énergie radiofréquence, et s’il n’est pas installé et utilisé conformément aux wireless controller (both sold separately). AC adaptor: AC 100-240 V, 0.2 A, 50/60 Hz instructions, pourrait causer un brouillage préjudiciable à la radiocommunication. Il est toutefois impossible de garantir qu’il n’y aura pas de brouillage préjudiciable dans une installation donnée. Si cette unité cause un Output AC adaptor: DC 5 V, 1500 mA Charging adaptor brouillage préjudiciable à la réception radio ou télévisuelle, ce qui peut être déterminé en activant ou désactivant External dimensions (w × h × d) Charging station: l’appareil, l’utilisateur est encouragé à tenter de corriger le brouillage en prenant l’une ou plusieurs des mesures Approx. 111.0 × 81.0 × 151.5 mm (4.4 × 3.2 × 6.0 in.) proposées suivantes : Charging adaptor: Réorienter ou déplacer l’antenne de réception. DUALSHOCK 3 Charging Station / Approx. 62.5 × 24.0 × 21.5 mm (2.5 × 1.0 × 0.9 in.) Éloigner l’unité du récepteur. ® Mass Charging station: Approx. 221 g (7.8 oz) Connecter l’appareil à une prise sur un autre circuit que celui auquel le récepteur est connecté. -

ACCESSORIES for PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control
ACCESSORIES FOR PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control Tokyo, October 3, 2006 – Sony Computer Entertainment Inc. (SCEI) today announced that Wireless Controller (SIXAXIS™) and Memory Card Adaptor would become available simultaneously with the launch of PLAYSTATION®3 (PS3) computer entertainment system on November 11th, 2006, in Japan, at a recommended retail price of 5,000 yen (tax included) and 1,500 yen (tax included) respectively. BD Remote Control will also become available on December 7th 2006, at a recommended retail price of 3,600 yen (tax included). Wireless Controller (SIXAXIS) for PS3 employs a high-precision, highly sensitive six-axis sensing system, which detects natural and intuitive movements of hands for real-time interactive play. With the adoption of Bluetooth® wireless technology, it allows up to 7 players to play at the same time, without having to attach any other external device such as a multitap. In addition, by simply plugging a USB cable to the controller, users can seamlessly switch from wireless to wired connection and automatically charge its battery while the controller is in use. Controller battery lasts up to 30 hours when fully charged *1). The new Memory Card Adaptor enables users to transfer data saved on Memory Cards for PlayStation® and PlayStation®2 onto the hard disk drive of PS3. To transfer data, users need to simply insert their Memory Cards to the Memory Card Adaptor connected to PS3 via a USB port. In December, BD Remote Control will also become available, which enables users to easily operate movies and music content on BD (Blu-ray Disc) and DVD on PS3. -
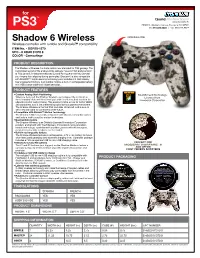
Shadow 6 Wireless CUSTOM ANALOG STICKS Wireless Controller with Rumble and Sixaxis™ Compatibility ITEM No
Shadow 6 Wireless CUSTOM ANALOG STICKS Wireless controller with rumble and Sixaxis™ compatibility ITEM No. - DGPS3-1370 UPC - 8 45620 01370 8 COLOR - Camouflage PRODUCT DESCRIPTION The Shadow 6 Wireless Controller sets a new standard for PS3 gaming. The customized layout of the analog sticks delivers more comfort and precision to PS3 gamers. It features enhanced L2 and R2 triggers that help prevent your fingers from slipping during game play. Shadow 6 is also compatible with SIXAXIS™ motion sensing technology and includes 2.4 GHz latency free wireless technology, dual rumble motors, a built-in rechargeable battery, mini USB charge cable and rubberized grips. PRODUCT FEATURES • Custom Analog Stick Positioning TouchSense® Technology When we designed the Shadow Wireless, we swapped the locations of Licensed from the left analog stick and directional pad while fine-tuning their location for Immersion Corporation ultimate comfort and precision. This arrangement is similar to that of XBOX 360 controllers, and is the preferred layout of serious gamers everywhere. The Shadow Wireless is the first PS3 controller of its kind, and is sure to set a new standard for controllers of the future. • Compatible with Sixaxis™ Motion Technology The Shadow 6 Wireless is fully compatible with Sixaxis compatible games and touts a highly sensitive motion technology. • Dual rumble motors The Shadow Wireless is an Officially Licensed Immersion Corporation product, and is built with TouchSense®, Immersion’s next-generation rumble technology. TouchSense® provides gamers with the strongest, most detailed rumble feedback on the market. • Built-in rechargeable battery The Shadow Wireless features a rechargeable, 3.7V Li-ion battery for hours of uninterrupted gameplay and excellent charging time. -

Playstation 3
INDEX 1 1 Index 7 Game Screen 12.13 RAID MODE / The Vestibule 2 About This Game 8 Status Screen 14 Character Select & Skills 3 Main Menu 9 Workstation 15 Item Evaluation & Weapon Upgrading 4 Campaign 10 Partner Character 16 Options / Resident Evil.Net 5 Controls 6 Combat and Special Actions 11 Skills "2", "PlayStation", "0", "%", "DUALSHOCK" and "SIXAXIS" are registered trademarks or trademarks of Sony Computer Entertainment Inc. "Sony Entertainment Network" is a trademark of Sony Corporation. "XMB" and "XrossMediaBar" are trademarks of Sony Corporation and Sony Computer Entertainment Inc. Library programs ©Sony Computer Entertainment Inc. "2" ©1994 Sony Computer Entertainment Inc. Dolby and the double-D symbol are ★ Online features will be added with title update. trademarks of Dolby Laboratories. ABOUT THIS GAME 2 This game is divided up into several episodes and content packs, Main Content which can be purchased separately. Essential Game Pack Episode 1 Pack Add-Ons Ep.1 Campaign Can be purchased in any order Episode 2 Episode 3 Episode 4 Pack Pack Pack Ep.2 Campaign Ep.3 Campaign Ep.4 Campaign Claire Barry Claire Barry Claire Barry Claire Barry Raid Mode Add-Ons Raid Mode Add-Ons Raid Mode Add-Ons Raid Mode (Stages, Items) (Stages, Items) (Stages, Items) At least 3,000KB of free space is required to save game data to your PlayStation®3 system. Do not turn Save Data off your PlayStation®3 system while the game is saving, as this may result in corrupted save data. This game is compatible with Dolby®Digital 5.1 surround sound. Connect your PlayStation®3 system to a sound system with Dolby Digital technology using an HDMI cable or digital optical cable. -

160GB (Model CECH 2501A) English/Spanish
Instruction Manual Manual de Instrucciones Before using this product, carefully read all product documentation and retain it for future reference. Antes de utilizar este producto, lea detenidamente toda la documentación del producto y consérvela para consultarla en el futuro. CECH-2501A 4-198-819-12(1) WARNING To avoid electrical shock, do not open the cabinet. Refer This equipment complies with FCC/IC radiation exposure limits set forth for uncontrolled equipment and meets the FCC radio frequency (RF) Exposure servicing to qualified personnel only. Guidelines in Supplement C to OET65 and RSS-102 of the IC radio frequency (RF) Exposure rules. This equipment should be installed and operated with at least 20 Caution cm (8 in) and more between the radiator and person’s body (excluding extremities: hands, wrists, feet and legs). Use of controls or adjustments or performance of This transmitter must not be co-located or operated in conjunction with any other procedures other than those specified herein may result in antenna or transmitter. hazardous radiation exposure. The wireless controller complies with FCC/IC radiation exposure limits set forth for uncontrolled equipment and meets the FCC radio frequency (RF) Exposure The use of optical instruments with this product will Guidelines in Supplement C to OET65 and RSS-102 of the IC radio frequency (RF) increase eye hazard. Exposure rules. This equipment has very low levels of RF energy that are deemed to comply without testing of specific absorption ratio (SAR). NOTE: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC rules. -

PS3 Videogames Put Players Into the Action 18 March 2011, by Glenn Chapman
PS3 videogames put players into the action 18 March 2011, by Glenn Chapman Sony is certain that console videogame lovers assistant producer for product development Victor want to be more immersed than ever in big, bold Harris showed off play in an "Uncharted 3: Drake's on-screen adventures. Deception" title featuring an Indiana Jones-style action hero. The Japanese electronics and entertainment giant is backing its belief with blockbuster 3D titles, The videogame was slated for release in motion-based controls, and a Sharp Shooter faux November. assault rifle which players can use to pick off in- game enemies. In-game protagonist Nathan Drake climbed, jumped, brawled, and shot his way out of a burning "We see it as the holy grail of gaming," Sony chateau in vivid 3D. spokesman Al de Leon told AFP in a PlayStation Lounge set up at the South By Southwest Glowing embers, flickering dust, and gray smoke Interactive festival this week in Texas. swirled in the air around the character as he leapt for handholds that seemed to jut from flame-licked "To be completely immersed in the gaming walls. Running up to ledges triggered touches of experience whether it is visually with the addition of vertigo in a player. 3D or physically with PlayStation Move you are getting a realistic experience." "We are always striving for more cinematic experiences," Harris said. Sony has sold more than 4.1 million Move accessories for PlayStation 3 (PS3) consoles since "People don't want to feel like they are playing a the motion-sensing controls hit the market in game," he added. -

The Echo: November 10, 2006
Consumerism or compassion? Opinions article considers corporations that support humanitarian causes The MT Cup Local coffee shop HE CHO discovered TNOVEMBER 10, 2006 ET AYLOR U NIVERSI T Y SINCE 1915 - VOLUME 94, NO. 11 WOW challenges TU to bless others Speakers and seminars encourage students' involvement in world missions BY DAVID PULLIAM portunity to respond to CONTRIBUTOR the needs of the world by prayer and missions.” As a part of World Oppor- The activities of WOW in- tunities Week, students were cluded prayer, discussion, challenged to reach out with seminars and speakers. Mis- the love of Christ to those sion representatives set up in need around the world. booths in the DC, giving stu- This challenge highlighted dents the opportunity to look WOW’s purpose - to encour- at different ministry organi- age students to consider be- zations and collect brochures coming more involved in and information packets. world missions. Some mission representa- The WOW co-directors tives also visited classrooms. this year were seniors An- Others lived with students in drew Ulasich and Valerie their dorms, spending time Schmitt, assisted by the with these students and dis- WOW cabinet comprised of cussing how they can be in- 21 other students. volved in missions. The word "barak," Hebrew James Gehman, a mission for "to bless," was chosen representative from the Latin as a key word for the week, America Mission, said he ap- which focused on giving preciates WOW because it’s students an opportunity to an opportunity for him to bless the world and dedi- share the needs of the Latin cate their lives to missions. -

Precauciones Acerca De Los Productos Playstation Move Nombre De Los
C Calibre el sensor interno del mando de movimiento. Seleccione (Ajustes) Nombre de los componentes Cómo usar el mando de movimiento (Ajustes de accesorios) [Calibrar mando de movimiento] en el menú XMB™. Siga las instrucciones en pantalla para completar la operación. Vista frontal Cómo instalar la cámara PlayStation Eye El mando de movimiento no funciona. ® C El mando de movimiento debe estar emparejado con el sistema PS3™ Esfera mediante un número de mando asignado por el sistema o por el software. 1 Ajuste la cámara PlayStation®Eye (se vende por separado) a la vista gran angular. Encienda el sistema (el indicador de encendido debe estar iluminado en verde intenso), conecte el sistema y el mando de movimiento con un cable USB y, a Si la cámara no está ajustada a la vista gran angular, el mando de movimiento no continuación, pulse el botón PS del mando de movimiento. Mando de movimiento PlayStation Move / Botón se detectará correctamente. ® Botón C Verifique el nivel de carga de la batería del mando de movimiento. El mando de Controle de movimento PlayStation Move Botón movimiento no funcionará si la batería está descargada. Para cargar el mando de ® Botón movimiento, conéctelo al sistema PS3™ por medio de un cable USB. Botón START (inicio) La batería no se carga o no se carga completamente. Manual de instrucciones / Manual de Instruções Botón Move C La batería sólo se puede cargar cuando el sistema PS3™ está encendido (el Coloque la marca del ángulo del objetivo indicador de encendido debe estar iluminado en verde intenso). Botón PS de forma que quede alineada con el El mando de movimiento no vibra. -
Remote Play - Wikipedia Case 1:19-Cv-07529-DLC Document 28-4 Filed 10/14/19 Page 2 of 9
Case 1:19-cv-07529-DLC Document 28-4 Filed 10/14/19 Page 1 of 9 EXHIBIT D Remote Play - Wikipedia Case 1:19-cv-07529-DLC Document 28-4 Filed 10/14/19 Page 2 of 9 Not logged in Talk Contributions Create account Log in Article Talk Read Edit View history Remote Play From Wikipedia, the free encyclopedia Main page Remote Play is a feature of Sony video game Contents Remote Play Featured content consoles that allows the PlayStation 3 and Current events PlayStation 4 to transmit its video and audio Random article output to another device; previously this could Donate to Wikipedia only be a PlayStation Portable or PlayStation Vita. Wikipedia store In 2014, it was expanded to include the use of Interaction PlayStation TV, Xperia smartphones and tablets Help (Z2 and later), and PlayStation Now. In 2016, it About Wikipedia was expanded to Microsoft Windows PCs and Community portal macOS. Finally, iOS and Android are supported. Recent changes Similar functionality is provided on Nintendo's Wii Contact page U console, using the Off-TV Play function. This Developer(s) Sony Interactive Tools feature essentially allows compatible home Entertainment What links here console games to be played on the handheld. Initial release 2006; 13 years ago Related changes While seldom implemented on PS3, Remote Play Stable release(s) [±] Upload file is a mandatory feature on all PS4 games, except Special pages Windows 2.5 / October 2, 2017; 2 years [1] Permanent link for games that utilize peripherals such as PC ago Page information PlayStation Move. Android 2.5.0 -

Analysis and Comparison of Low Cost Gaming Controllers for Motion Analysis
2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Montréal, Canada, July 6-9, 2010 Analysis and Comparison of Low Cost Gaming Controllers for Motion Analysis Sagar N. Purkayastha, Nick Eckenstein, Michael D. Byrne, and Marcia K. O’Malley Abstract— Gaming controllers are attractive devices for re- search due to their onboard sensing capabilities and low cost. However, a proper quantitative analysis regarding their suit- ability for motion capture has yet to be conducted. In this paper, a detailed analysis of the sensors of two of these controllers, the Nintendo Wiimote and the Sony Playstation 3 Sixaxis is presented. The acceleration data from the sensors were plotted and compared with computed acceleration data derived from a high resolution encoder, then correlated to determine the performance of the gaming controllers. The results show high correlation between the acceleration data of the sensors and the computed acceleration, and more consistency in the sensors of (a) (b) the Sixaxis. The applications of the findings are discussed with respect to potential research ventures. I. INTRODUCTION Video game controllers such as Nintendo’s Wii remote and Sony’s Playstation controllers have revolutionized how we interact with games by enabling intuitive motion sensing and interpretation rather than relying on keyboard, mouse, or but- ton clicks. As Gams and Mudry noted, recent developments in the field of Micro Electro Mechanical Systems (MEMS) (c) (d) have made it possible to develop high precision and high Fig. 1. (a),(c) show the coordinate system used by GlovePIE and (b), (d) performance sensors for a nominal cost [1]. The availability show the local coordinate systems of the controllers of such sensors within these gaming controllers, and the wide range of tools available for open-source development with these devices, makes devices such as the Wiimote and sounds in a collaborative way.