Analysis and Comparison of Low Cost Gaming Controllers for Motion Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Anywhere, Anydevice Gaming Siddharth Singh
Anywhere, Anydevice Gaming Siddharth Singh, Soh Chor Kiong Ricky, Adrian David Cheok Human Interface Technology Laboratory Department of Electrical & Computer Engineering National University of Singapore, Singapore fg0202382,eng00673,[email protected] ABSTRACT This poster describes a multi-player networked Pong game that can be played in real-time on mobile devices and sta- tionary PCs. Through this game we intend to explore the realm of the next generation of games which, we believe, will incorporate elements of mobility, multiple connectiv- ity methods and playability on different types of devices. The system comprises the Sony-Ericsson P800 phone, a cen- tral game server, and personal computers. The client-server model has been used so that all interaction is done through the game server. The server can host multiple games at the same time. Each game has two players and a number of spectators who can view the game. The spectators can in- teract with each other using text messages. The Pong game is not the end to itself. This work is the core of an ongo- ing research project on multiple platform, multiple player mobile entertainment. Figure 1: Anywhere Gaming system Categories and Subject Descriptors H.4 [Information Systems Applications]: Miscellaneous; Corporation released the PocketStation for its highly popu- C.2.4 [Distributed Systems]: Distributed Applications; lar game console Sony Playstation [5] in 1999. PocketStation K.8.0 [General]: Games allows users to save their game data from the PlayStation and play the game on the portable PocketStation. These Keywords devices enable players to continue the same game on two Mobile gaming, cross-device gaming, network gaming different devices, and thus are a step forward towards any- where gaming. -

SIXAXIS Quadcopter George Allen, Mark Alitawi, Cory Gordinier {Geoallen, Malitawi, Cgordini}@Umich.Edu
Electrical Engineering and Computer Science EECS373 - Design of Microprocessor-Based Systems SIXAXIS Quadcopter George Allen, Mark Alitawi, Cory Gordinier {geoallen, malitawi, cgordini}@umich.edu Introduction: Quad-motor vehicle controlled with PlayStation SIXAXIS controller • Quadcopter: Rotorcraft propelled by four rotors • SIXAXIS: PS3 controller with built-in single-axis gyroscope and three-axis accelerometer, analog and digital buttons. Communicates over Bluetooth or USB. • Combined: Non-autonomous quadcopter controlled with Bluetooth radio Problem Description: Making vehicles fly is hard!! • Flight controls are very difficult to implement • Over-compensated feedback from PID controller can lead to crashing • PS3 controller solely designed for communicating with a PS3 console Proposed Solution: Open source flight controls Hardware: • Pololu MinIMU-9 v2 • Inertial Measurement Unit • Provides aircraft data for maintaining stable flight • Bosch BMP085 • Barometric pressure sensor • Provides altitude readings • ArduPilot Mega v1 • Arduino microcontroller • Programmed to manage stabilization and navigation of aircraft Software: • Supplied Code: Pololu MinIMU-9 v2 Bosch BMP085 • Ardupilot flight controls • 3 Axis Gyroscope • Barometric Pressure Sensor http://code.google.com/p/arducopter/ • 3 Axis Accelerometer • Temperature Sensor • 3 Axis Magnetometer • I2C Interface • I2C Interface • Our Code: • AP_InertialSensor_MinIMU9 • AP_Compass ArduPilot Mega • 16MHz ATMega 2560 • Altered configuration files to allow for operation • ATMega 328 with our sensors • 16 Analog Inputs (ADC on each) • 40 Digital Inputs/Outputs • 256K Flash Conclusion: Issues integrating our sensors • 8K SRAM • 4k EEPROM • Supplied ArduPilot flight controls are pre-configured to work with specific components • Difficulty in integrating our code into existing program to operate with our devices . -

PSP® Go PSP® (PLAYSTATION®PORTABLE) EVOLVES to MATCH the DIGITAL LIFESTYLE
FOR IMMEDIATE RELEASE PSP® go PSP® (PLAYSTATION®PORTABLE) EVOLVES TO MATCH THE DIGITAL LIFESTYLE With an Ultra-Portable Design and Digital Content Focus, PSPgo to Hit the Worldwide Market This Fall, Further Enhancing the User Experience Along with PSP-3000 Tokyo, June 3, 2009 - Sony Computer Entertainment Inc. (SCEI) today unveiled PSP® (PlayStation®Portable) go (PSP-N1000), a new evolution of PSP handheld entertainment system, specifically designed to suit the digital lifestyle of consumers who enjoy downloadable content on the go. PSPgo will become available in stores on October 1, 2009, in North America, Europe/ PAL territories and Asian countries and regions at a recommended retail price (RRP) of US$249 and €249, and on November 1, 2009, in Japan at a RRP of 26,800 yen (including tax). With both the existing PSP-3000 and new PSPgo, the company will further enhance the ultimate gaming and entertainment experiences on the go while providing consumers with the opportunity to choose the PSP system that’s right for them. PSPgo is ideal for today’s on-the move consumers who prefer not to carry around disc-based content and are looking for on-demand entertainment. With the steady expansion of broadband network infrastructure, the number of users who download and enjoy digital entertainment content has been increasing remarkably. To address this growing trend, PSPgo replaces the UMD drive*1 with 16GB of flash memory to store a variety of digital entertainment content, offering users unlimited possibilities of portable digital entertainment delivered through PlayStation®Network. PSPgo, smaller and lighter than ever with a sophisticated design featuring an easy sliding display panel, is truly pocket-sized and can be taken everywhere. -

(CECH-ZDC1U) English/French/Spanish Instruction Manual
Charging Ce produit a été testé et il a été déterminé qu’il se conforme aux normes stipulées par l’article 15 des règlements Specifications de la FCC pour un appareil numérique de catégorie B. Ces normes sont établies afin d’offrir une protection raisonnable contre toute possibilité de brouillage préjudiciable dans une installation résidentielle. Cet appareil 1 Insert the charging adaptor into the USB connector on the DUALSHOCK®3/SIXAXIS® Input Charging station: DC 5 V produit, utilise et peut émettre une énergie radiofréquence, et s’il n’est pas installé et utilisé conformément aux wireless controller (both sold separately). AC adaptor: AC 100-240 V, 0.2 A, 50/60 Hz instructions, pourrait causer un brouillage préjudiciable à la radiocommunication. Il est toutefois impossible de garantir qu’il n’y aura pas de brouillage préjudiciable dans une installation donnée. Si cette unité cause un Output AC adaptor: DC 5 V, 1500 mA Charging adaptor brouillage préjudiciable à la réception radio ou télévisuelle, ce qui peut être déterminé en activant ou désactivant External dimensions (w × h × d) Charging station: l’appareil, l’utilisateur est encouragé à tenter de corriger le brouillage en prenant l’une ou plusieurs des mesures Approx. 111.0 × 81.0 × 151.5 mm (4.4 × 3.2 × 6.0 in.) proposées suivantes : Charging adaptor: Réorienter ou déplacer l’antenne de réception. DUALSHOCK 3 Charging Station / Approx. 62.5 × 24.0 × 21.5 mm (2.5 × 1.0 × 0.9 in.) Éloigner l’unité du récepteur. ® Mass Charging station: Approx. 221 g (7.8 oz) Connecter l’appareil à une prise sur un autre circuit que celui auquel le récepteur est connecté. -

Playstation 3 (PS3)
Parental controls guide Playstation 3 (PS3) Parental Controls information Type of guide Gaming consoles and platforms Features and Benefits The PS3 Parental Controls allow you to restrict games and DVDs with mature content, use of the internet browser and how your child can chat and interact on the PlayStation Network. What specific content can I restrict? Browser Access Chatting Game Ratings Inappropriate content Online games Privacy and identity theft Purchasing What do I need? Access to the PlayStation 3 console. Playstation 3 (PS3) Step by step guide 1 From the main menu navigate left/right to select “Settings” and then scroll down to “Security Settings” and press the X button. Playstation 3 (PS3) Step by step guide 2 Select “Change Password”. Playstation 3 (PS3) Step by step guide 3 Enter your current password (the default passcode is 0000). Playstation 3 (PS3) Step by step guide 4 Enter your new 4 digit passcode and then confirm that you want to change the passcode. Playstation 3 (PS3) Step by step guide 5 Scroll down to “BD – Parental Control” and press the X button. When prompted enter your PIN. Playstation 3 (PS3) Step by step guide 6 On the “BD – Parental Control” screen you are able to restrict Blue-Ray Disc playback by age on supporting Blue-Ray Discs. Confirm your selection. Playstation 3 (PS3) Step by step guide 7 Scroll down to “BD/DVD – Parental Control Region Code” and press the X button. When prompted enter your PIN. Playstation 3 (PS3) Step by step guide 8 On the “BD/DVD – Parental Control Region Code” page you are required to set the region you are in which will allow the system to use age ratings relevant to your region. -
Forensic Analysis of a Playstation 3 Console
Publications 2010 Forensic Analysis of a Playstation 3 Console Scott Conrad University of Central Florida Greg Dorn University of Central Florida Philip Craiger University of Central Florida, [email protected] Follow this and additional works at: https://commons.erau.edu/publication Part of the Forensic Science and Technology Commons, and the Information Security Commons Scholarly Commons Citation Conrad, S., Dorn, G., & Craiger, P. (2010). Forensic Analysis of a Playstation 3 Console. Advances in Digital Forensics VI, (). Retrieved from https://commons.erau.edu/publication/999 This Conference Proceeding is brought to you for free and open access by Scholarly Commons. It has been accepted for inclusion in Publications by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. Chapter 5 FORENSIC ANALYSIS OF A PLAYSTATION 3 CONSOLE Scott Conrad, Greg Dorn and Philip Craiger Abstract The Sony PlayStation 3 (PS3) is a powerful gaming console that sup- ports Internet-related activities, local file storage and the playing of Blu-ray movies. The PS3 also allows users to partition and install a secondary operating system on the hard drive. This “desktop-like” func- tionality along with the encryption of the primary hard drive containing the gaming software raises significant issues related to the forensic anal- ysis of PS3 systems. This paper discusses the PS3 architecture and behavior, and provides recommendations for conducting forensic inves- tigations of PS3 systems. Keywords: Sony PlayStation 3, gaming console, forensic analysis 1. Introduction The Sony PlayStation 3 (PS3) hit the Japanese and North American retail markets in November 2006 (March 2007 in Europe) [13]. -

ACCESSORIES for PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control
ACCESSORIES FOR PLAYSTATION®3 BECOME AVAILABLE Wireless Controller (SIXAXIS™), Memory Card Adaptor and BD Remote Control Tokyo, October 3, 2006 – Sony Computer Entertainment Inc. (SCEI) today announced that Wireless Controller (SIXAXIS™) and Memory Card Adaptor would become available simultaneously with the launch of PLAYSTATION®3 (PS3) computer entertainment system on November 11th, 2006, in Japan, at a recommended retail price of 5,000 yen (tax included) and 1,500 yen (tax included) respectively. BD Remote Control will also become available on December 7th 2006, at a recommended retail price of 3,600 yen (tax included). Wireless Controller (SIXAXIS) for PS3 employs a high-precision, highly sensitive six-axis sensing system, which detects natural and intuitive movements of hands for real-time interactive play. With the adoption of Bluetooth® wireless technology, it allows up to 7 players to play at the same time, without having to attach any other external device such as a multitap. In addition, by simply plugging a USB cable to the controller, users can seamlessly switch from wireless to wired connection and automatically charge its battery while the controller is in use. Controller battery lasts up to 30 hours when fully charged *1). The new Memory Card Adaptor enables users to transfer data saved on Memory Cards for PlayStation® and PlayStation®2 onto the hard disk drive of PS3. To transfer data, users need to simply insert their Memory Cards to the Memory Card Adaptor connected to PS3 via a USB port. In December, BD Remote Control will also become available, which enables users to easily operate movies and music content on BD (Blu-ray Disc) and DVD on PS3. -
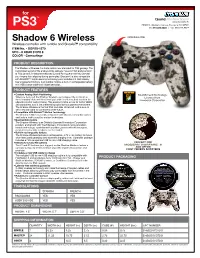
Shadow 6 Wireless CUSTOM ANALOG STICKS Wireless Controller with Rumble and Sixaxis™ Compatibility ITEM No
Shadow 6 Wireless CUSTOM ANALOG STICKS Wireless controller with rumble and Sixaxis™ compatibility ITEM No. - DGPS3-1370 UPC - 8 45620 01370 8 COLOR - Camouflage PRODUCT DESCRIPTION The Shadow 6 Wireless Controller sets a new standard for PS3 gaming. The customized layout of the analog sticks delivers more comfort and precision to PS3 gamers. It features enhanced L2 and R2 triggers that help prevent your fingers from slipping during game play. Shadow 6 is also compatible with SIXAXIS™ motion sensing technology and includes 2.4 GHz latency free wireless technology, dual rumble motors, a built-in rechargeable battery, mini USB charge cable and rubberized grips. PRODUCT FEATURES • Custom Analog Stick Positioning TouchSense® Technology When we designed the Shadow Wireless, we swapped the locations of Licensed from the left analog stick and directional pad while fine-tuning their location for Immersion Corporation ultimate comfort and precision. This arrangement is similar to that of XBOX 360 controllers, and is the preferred layout of serious gamers everywhere. The Shadow Wireless is the first PS3 controller of its kind, and is sure to set a new standard for controllers of the future. • Compatible with Sixaxis™ Motion Technology The Shadow 6 Wireless is fully compatible with Sixaxis compatible games and touts a highly sensitive motion technology. • Dual rumble motors The Shadow Wireless is an Officially Licensed Immersion Corporation product, and is built with TouchSense®, Immersion’s next-generation rumble technology. TouchSense® provides gamers with the strongest, most detailed rumble feedback on the market. • Built-in rechargeable battery The Shadow Wireless features a rechargeable, 3.7V Li-ion battery for hours of uninterrupted gameplay and excellent charging time. -

Ps4 Architecture
PS4 ARCHITECTURE JERRY AFFRICOT OVERVIEW • Evolution of game consoles • PlayStation History • CPU Architecture • GPU architecture • System Memory • Future of the PlayStation EVOLUTION OF GAME CONSOLES • 1967 • First video game console with two attached controllers • Invented by Ralph Baer • Only six simple games: ping-pong, tennis, handball, volleyball, chase games, light-gun games • 1975-1977 • Magnavox Odyssey consoles • Same games with better graphics, controllers. EVOLUTION OF GAME CONSOLES (continued) • 1978-1980 • First Nintendo video gaming consoles • First color TV game series sold only in Japan • 1981-1985 • Development of games like fighting, platform, adventure and RPG • Classic games: • Pac-man, Mario Bros, the Legend of Zelda etc. EVOLUTION OF GAMES CONSOLES (continued) • 1986-1990 • Mega Drive/Genesis • Super Nintendo Entertainment System (SNES) • 1991-1993 • Compact discs • Transition of 2D graphics to that of 3D graphics • First CD console launched by Philips (1991) EVOLUTION OF GAME CONSOLES (continued) • 1994-1997 • PlayStation release • Nintendo 64 (still using cartridges) • 1998-2004 • PlayStation 2 • GameCube • Xbox featuring Xbox Live HISTORY OF THE PLAYSTATION • PlayStation (1994) • PS1 (2000) • Smaller version of the PlayStation • PS2 (2000) • Backward compatible with most PS1 games • PS2 Slim line (2004) • Smaller version of the PS2 HISTORY OF THE PLAYSTATION (continued) • PSP (2004) • PS3 (2006) • First console to introduce use of motion sensing technology • Slimmer model released in 2009 • PSP Go (2009) • PS -
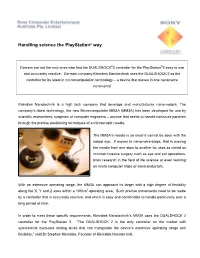
Handling Science the Playstation® Way
Handling science the PlayStation® way Gamers are not the only ones who find the DUALSHOCK®2 controller for the PlayStation®2 easy to use and accurately reactive. German company Kleindiek Nanotechnik uses the DUALSHOCK 2 as the controller for its latest in micromanipulation technology – a device that moves in one nanometre increments! Kleindiek Nanotechnik is a high tech company that develops and manufactures nano-motors. The company’s latest technology, the new Micromanipulator MM3A (MM3A) has been developed for use by scientific researchers, surgeons or computer engineers – anyone that needs to handle miniscule particles through the precise positioning techniques of a microscopic needle. The MM3A’s needle is so small it cannot be seen with the naked eye. It moves in nanometre-steps, that is moving the needle from one atom to another for uses as varied as minimal invasive surgery such as eye and ear operations, brain research in the field of life science or even working on micro computer chips or semiconductors. With an extensive operating range, the MM3A can approach its target with a high degree of flexibility along the X, Y and Z axes within a 100cm3 operating area. Such precise movements need to be made by a controller that is accurately reactive, and which is easy and comfortable to handle particularly over a long period of time. In order to meet these specific requirements, Kleindiek Nanotechnik’s MM3A uses the DUALSHOCK 2 controller for the PlayStation 2. “The DUALSHOCK 2 is the only controller on the market with symmetrical multi-axis analog sticks that can manipulate the device’s extensive operating range and flexibility,” said Dr Stephan Kleindiek, Founder of Kleindiek Nanotechnik. -

Playstation®5 Quick Start Guide
PlayStation®5 Quick Start Guide CFI-1016A 7033905 Let’s get started 1 Attach the base. Always attach the base to the console, whether it’s in the 1 Place the console with the rear side facing up, vertical or horizontal position. and then remove the screw hole cap. Place your console on a flat surface when attaching the base. You’ll need to reconfigure the base for the position of your console. Rotate the top and bottom part of the base in opposite directions. Keep rotating until you hear a “click”. 2 Attach the screw hole cap to the bottom of the base. 3 Remove the screw from the bottom of the base. For the vertical position Bottom of base 2 3 With the base attached Make sure the hook is in the position 4 Attach the base, and then secure with a screw. Use as illustrated below before attaching a coin or similarly shaped object to tighten the screw. the base to the console. Hook 2 Let’s get started 2 Connect the HDMI cable and the AC EN For the horizontal position power cord. Use the included cables. Make sure the hook is in the position Make all connections before plugging the AC power cord as illustrated below before attaching the base to the console. into an electricity supply. Hook With the base attached Rear view HDMI OUT port HDMI IN port 1 Place the console with the rear side facing up. Align the base with the marked area on the console, and press the base in firmly. -

Playstation 3
INDEX 1 1 Index 7 Game Screen 12.13 RAID MODE / The Vestibule 2 About This Game 8 Status Screen 14 Character Select & Skills 3 Main Menu 9 Workstation 15 Item Evaluation & Weapon Upgrading 4 Campaign 10 Partner Character 16 Options / Resident Evil.Net 5 Controls 6 Combat and Special Actions 11 Skills "2", "PlayStation", "0", "%", "DUALSHOCK" and "SIXAXIS" are registered trademarks or trademarks of Sony Computer Entertainment Inc. "Sony Entertainment Network" is a trademark of Sony Corporation. "XMB" and "XrossMediaBar" are trademarks of Sony Corporation and Sony Computer Entertainment Inc. Library programs ©Sony Computer Entertainment Inc. "2" ©1994 Sony Computer Entertainment Inc. Dolby and the double-D symbol are ★ Online features will be added with title update. trademarks of Dolby Laboratories. ABOUT THIS GAME 2 This game is divided up into several episodes and content packs, Main Content which can be purchased separately. Essential Game Pack Episode 1 Pack Add-Ons Ep.1 Campaign Can be purchased in any order Episode 2 Episode 3 Episode 4 Pack Pack Pack Ep.2 Campaign Ep.3 Campaign Ep.4 Campaign Claire Barry Claire Barry Claire Barry Claire Barry Raid Mode Add-Ons Raid Mode Add-Ons Raid Mode Add-Ons Raid Mode (Stages, Items) (Stages, Items) (Stages, Items) At least 3,000KB of free space is required to save game data to your PlayStation®3 system. Do not turn Save Data off your PlayStation®3 system while the game is saving, as this may result in corrupted save data. This game is compatible with Dolby®Digital 5.1 surround sound. Connect your PlayStation®3 system to a sound system with Dolby Digital technology using an HDMI cable or digital optical cable.