Transformations and Tessellations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In Order for the Figure to Map Onto Itself, the Line of Reflection Must Go Through the Center Point
3-5 Symmetry State whether the figure appears to have line symmetry. Write yes or no. If so, copy the figure, draw all lines of symmetry, and state their number. 1. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The figure has reflectional symmetry. In order for the figure to map onto itself, the line of reflection must go through the center point. Two lines of reflection go through the sides of the figure. Two lines of reflection go through the vertices of the figure. Thus, there are four possible lines that go through the center and are lines of reflections. Therefore, the figure has four lines of symmetry. eSolutionsANSWER: Manual - Powered by Cognero Page 1 yes; 4 2. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure does not have reflectional symmetry. There is no way to fold or reflect it onto itself. ANSWER: no 3. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure has reflectional symmetry. The figure has a vertical line of symmetry. It does not have a horizontal line of symmetry. The figure does not have a line of symmetry through the vertices. Thus, the figure has only one line of symmetry. ANSWER: yes; 1 State whether the figure has rotational symmetry. Write yes or no. If so, copy the figure, locate the center of symmetry, and state the order and magnitude of symmetry. -
EXAM QUESTIONS (Part Two)
Created by T. Madas MATRICES EXAM QUESTIONS (Part Two) Created by T. Madas Created by T. Madas Question 1 (**) Find the eigenvalues and the corresponding eigenvectors of the following 2× 2 matrix. 7 6 A = . 6 2 2 3 λ= −2, u = α , λ=11, u = β −3 2 Question 2 (**) A transformation in three dimensional space is defined by the following 3× 3 matrix, where x is a scalar constant. 2− 2 4 C =5x − 2 2 . −1 3 x Show that C is non singular for all values of x . FP1-N , proof Created by T. Madas Created by T. Madas Question 3 (**) The 2× 2 matrix A is given below. 1 8 A = . 8− 11 a) Find the eigenvalues of A . b) Determine an eigenvector for each of the corresponding eigenvalues of A . c) Find a 2× 2 matrix P , so that λ1 0 PT AP = , 0 λ2 where λ1 and λ2 are the eigenvalues of A , with λ1< λ 2 . 1 2 1 2 5 5 λ1= −15, λ 2 = 5 , u= , v = , P = − 2 1 − 2 1 5 5 Created by T. Madas Created by T. Madas Question 4 (**) Describe fully the transformation given by the following 3× 3 matrix. 0.28− 0.96 0 0.96 0.28 0 . 0 0 1 rotation in the z axis, anticlockwise, by arcsin() 0.96 Question 5 (**) A transformation in three dimensional space is defined by the following 3× 3 matrix, where k is a scalar constant. 1− 2 k A = k 2 0 . 2 3 1 Show that the transformation defined by A can be inverted for all values of k . -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

Two-Dimensional Geometric Transformations
Two-Dimensional Geometric Transformations 1 Basic Two-Dimensional Geometric Transformations 2 Matrix Representations and Homogeneous Coordinates 3 Inverse Transformations 4 Two-Dimensional Composite Transformations 5 Other Two-Dimensional Transformations 6 Raster Methods for Geometric Transformations 7 OpenGL Raster Transformations 8 Transformations between Two-Dimensional Coordinate Systems 9 OpenGL Functions for Two-Dimensional Geometric Transformations 10 OpenGL Geometric-Transformation o far, we have seen how we can describe a scene in Programming Examples S 11 Summary terms of graphics primitives, such as line segments and fill areas, and the attributes associated with these primitives. Also, we have explored the scan-line algorithms for displaying output primitives on a raster device. Now, we take a look at transformation operations that we can apply to objects to reposition or resize them. These operations are also used in the viewing routines that convert a world-coordinate scene description to a display for an output device. In addition, they are used in a variety of other applications, such as computer-aided design (CAD) and computer animation. An architect, for example, creates a layout by arranging the orientation and size of the component parts of a design, and a computer animator develops a video sequence by moving the “camera” position or the objects in a scene along specified paths. Operations that are applied to the geometric description of an object to change its position, orientation, or size are called geometric transformations. Sometimes geometric transformations are also referred to as modeling transformations, but some graphics packages make a From Chapter 7 of Computer Graphics with OpenGL®, Fourth Edition, Donald Hearn, M. -

Feature Matching and Heat Flow in Centro-Affine Geometry
Symmetry, Integrability and Geometry: Methods and Applications SIGMA 16 (2020), 093, 22 pages Feature Matching and Heat Flow in Centro-Affine Geometry Peter J. OLVER y, Changzheng QU z and Yun YANG x y School of Mathematics, University of Minnesota, Minneapolis, MN 55455, USA E-mail: [email protected] URL: http://www.math.umn.edu/~olver/ z School of Mathematics and Statistics, Ningbo University, Ningbo 315211, P.R. China E-mail: [email protected] x Department of Mathematics, Northeastern University, Shenyang, 110819, P.R. China E-mail: [email protected] Received April 02, 2020, in final form September 14, 2020; Published online September 29, 2020 https://doi.org/10.3842/SIGMA.2020.093 Abstract. In this paper, we study the differential invariants and the invariant heat flow in centro-affine geometry, proving that the latter is equivalent to the inviscid Burgers' equa- tion. Furthermore, we apply the centro-affine invariants to develop an invariant algorithm to match features of objects appearing in images. We show that the resulting algorithm com- pares favorably with the widely applied scale-invariant feature transform (SIFT), speeded up robust features (SURF), and affine-SIFT (ASIFT) methods. Key words: centro-affine geometry; equivariant moving frames; heat flow; inviscid Burgers' equation; differential invariant; edge matching 2020 Mathematics Subject Classification: 53A15; 53A55 1 Introduction The main objective in this paper is to study differential invariants and invariant curve flows { in particular the heat flow { in centro-affine geometry. In addition, we will present some basic applications to feature matching in camera images of three-dimensional objects, comparing our method with other popular algorithms. -

Chapter 1 – Symmetry of Molecules – P. 1
Chapter 1 – Symmetry of Molecules – p. 1 - 1. Symmetry of Molecules 1.1 Symmetry Elements · Symmetry operation: Operation that transforms a molecule to an equivalent position and orientation, i.e. after the operation every point of the molecule is coincident with an equivalent point. · Symmetry element: Geometrical entity (line, plane or point) which respect to which one or more symmetry operations can be carried out. In molecules there are only four types of symmetry elements or operations: · Mirror planes: reflection with respect to plane; notation: s · Center of inversion: inversion of all atom positions with respect to inversion center, notation i · Proper axis: Rotation by 2p/n with respect to the axis, notation Cn · Improper axis: Rotation by 2p/n with respect to the axis, followed by reflection with respect to plane, perpendicular to axis, notation Sn Formally, this classification can be further simplified by expressing the inversion i as an improper rotation S2 and the reflection s as an improper rotation S1. Thus, the only symmetry elements in molecules are Cn and Sn. Important: Successive execution of two symmetry operation corresponds to another symmetry operation of the molecule. In order to make this statement a general rule, we require one more symmetry operation, the identity E. (1.1: Symmetry elements in CH4, successive execution of symmetry operations) 1.2. Systematic classification by symmetry groups According to their inherent symmetry elements, molecules can be classified systematically in so called symmetry groups. We use the so-called Schönfliess notation to name the groups, Chapter 1 – Symmetry of Molecules – p. 2 - which is the usual notation for molecules. -

Pose Estimation for Objects with Rotational Symmetry
Pose Estimation for Objects with Rotational Symmetry Enric Corona, Kaustav Kundu, Sanja Fidler Abstract— Pose estimation is a widely explored problem, enabling many robotic tasks such as grasping and manipulation. In this paper, we tackle the problem of pose estimation for objects that exhibit rotational symmetry, which are common in man-made and industrial environments. In particular, our aim is to infer poses for objects not seen at training time, but for which their 3D CAD models are available at test time. Previous X 2 X 1 X 2 X 1 work has tackled this problem by learning to compare captured Y ∼ 2 Y ∼ 2 Y ∼ 2 Y ∼ 2 views of real objects with the rendered views of their 3D CAD Z ∼ 6 Z ∼ 1 Z ∼ Z ∼ 1 ∼ ∼ ∼ ∞ ∼ models, by embedding them in a joint latent space using neural Fig. 1. Many industrial objects such as various tools exhibit rotational networks. We show that sidestepping the issue of symmetry symmetries. In our work, we address pose estimation for such objects. in this scenario during training leads to poor performance at test time. We propose a model that reasons about rotational symmetry during training by having access to only a small set of that this is not a trivial task, as the rendered views may look symmetry-labeled objects, whereby exploiting a large collection very different from objects in real images, both because of of unlabeled CAD models. We demonstrate that our approach different background, lighting, and possible occlusion that significantly outperforms a naively trained neural network on arise in real scenes. -
12-5 Worksheet Part C
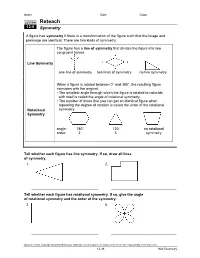
Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry A figure has symmetry if there is a transformation of the figure such that the image and preimage are identical. There are two kinds of symmetry. The figure has a line of symmetry that divides the figure into two congruent halves. Line Symmetry one line of symmetry two lines of symmetry no line symmetry When a figure is rotated between 0° and 360°, the resulting figure coincides with the original. • The smallest angle through which the figure is rotated to coincide with itself is called the angle of rotational symmetry. • The number of times that you can get an identical figure when repeating the degree of rotation is called the order of the rotational Rotational symmetry. Symmetry angle: 180° 120° no rotational order: 2 3 symmetry Tell whether each figure has line symmetry. If so, draw all lines of symmetry. 1. 2. _________________________________________ ________________________________________ Tell whether each figure has rotational symmetry. If so, give the angle of rotational symmetry and the order of the symmetry. 3. 4. _________________________________________ ________________________________________ Original content Copyright © by Holt McDougal. Additions and changes to the original content are the responsibility of the instructor. 12-38 Holt Geometry Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry continued Three-dimensional figures can also have symmetry. Symmetry in Three Description Example Dimensions A plane can divide a figure into two Plane Symmetry congruent halves. There is a line about which a figure Symmetry About can be rotated so that the image and an Axis preimage are identical. -
Symmetry and Groups, and Crystal Structures
CHAPTER 3: SYMMETRY AND GROUPS, AND CRYSTAL STRUCTURES Sarah Lambart RECAP CHAP. 2 2 different types of close packing: hcp: tetrahedral interstice (ABABA) ccp: octahedral interstice (ABCABC) Definitions: The coordination number or CN is the number of closest neighbors of opposite charge around an ion. It can range from 2 to 12 in ionic structures. These structures are called coordination polyhedron. RECAP CHAP. 2 Rx/Rz C.N. Type Hexagonal or An ideal close-packing of sphere 1.0 12 Cubic for a given CN, can only be Closest Packing achieved for a specific ratio of 1.0 - 0.732 8 Cubic ionic radii between the anions and 0.732 - 0.414 6 Octahedral Tetrahedral (ex.: the cations. 0.414 - 0.225 4 4- SiO4 ) 0.225 - 0.155 3 Triangular <0.155 2 Linear RECAP CHAP. 2 Pauling’s rule: #1: the coodination polyhedron is defined by the ratio Rcation/Ranion #2: The Electrostatic Valency (e.v.) Principle: ev = Z/CN #3: Shared edges and faces of coordination polyhedra decreases the stability of the crystal. #4: In crystal with different cations, those of high valency and small CN tend not to share polyhedral elements #5: The principle of parsimony: The number of different sites in a crystal tends to be small. CONTENT CHAP. 3 (2-3 LECTURES) Definitions: unit cell and lattice 7 Crystal systems 14 Bravais lattices Element of symmetry CRYSTAL LATTICE IN TWO DIMENSIONS A crystal consists of atoms, molecules, or ions in a pattern that repeats in three dimensions. The geometry of the repeating pattern of a crystal can be described in terms of a crystal lattice, constructed by connecting equivalent points throughout the crystal. -

Geometric Transformation Techniques for Digital I~Iages: a Survey
GEOMETRIC TRANSFORMATION TECHNIQUES FOR DIGITAL I~IAGES: A SURVEY George Walberg Department of Computer Science Columbia University New York, NY 10027 [email protected] December 1988 Technical Report CUCS-390-88 ABSTRACT This survey presents a wide collection of algorithms for the geometric transformation of digital images. Efficient image transformation algorithms are critically important to the remote sensing, medical imaging, computer vision, and computer graphics communities. We review the growth of this field and compare all the described algorithms. Since this subject is interdisci plinary, emphasis is placed on the unification of the terminology, motivation, and contributions of each technique to yield a single coherent framework. This paper attempts to serve a dual role as a survey and a tutorial. It is comprehensive in scope and detailed in style. The primary focus centers on the three components that comprise all geometric transformations: spatial transformations, resampling, and antialiasing. In addition, considerable attention is directed to the dramatic progress made in the development of separable algorithms. The text is supplemented with numerous examples and an extensive bibliography. This work was supponed in part by NSF grant CDR-84-21402. 6.5.1 Pyramids 68 6.5.2 Summed-Area Tables 70 6.6 FREQUENCY CLAMPING 71 6.7 ANTIALIASED LINES AND TEXT 71 6.8 DISCUSSION 72 SECTION 7 SEPARABLE GEOMETRIC TRANSFORMATION ALGORITHMS 7.1 INTRODUCTION 73 7.1.1 Forward Mapping 73 7.1.2 Inverse Mapping 73 7.1.3 Separable Mapping 74 7.2 2-PASS TRANSFORMS 75 7.2.1 Catmull and Smith, 1980 75 7.2.1.1 First Pass 75 7.2.1.2 Second Pass 75 7.2.1.3 2-Pass Algorithm 77 7.2.1.4 An Example: Rotation 77 7.2.1.5 Bottleneck Problem 78 7.2.1.6 Foldover Problem 79 7.2.2 Fraser, Schowengerdt, and Briggs, 1985 80 7.2.3 Fant, 1986 81 7.2.4 Smith, 1987 82 7.3 ROTATION 83 7.3.1 Braccini and Marino, 1980 83 7.3.2 Weiman, 1980 84 7.3.3 Paeth, 1986/ Tanaka. -

Transformation Groups in Non-Riemannian Geometry Charles Frances
Transformation groups in non-Riemannian geometry Charles Frances To cite this version: Charles Frances. Transformation groups in non-Riemannian geometry. Sophus Lie and Felix Klein: The Erlangen Program and Its Impact in Mathematics and Physics, European Mathematical Society Publishing House, pp.191-216, 2015, 10.4171/148-1/7. hal-03195050 HAL Id: hal-03195050 https://hal.archives-ouvertes.fr/hal-03195050 Submitted on 10 Apr 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Transformation groups in non-Riemannian geometry Charles Frances Laboratoire de Math´ematiques,Universit´eParis-Sud 91405 ORSAY Cedex, France email: [email protected] 2000 Mathematics Subject Classification: 22F50, 53C05, 53C10, 53C50. Keywords: Transformation groups, rigid geometric structures, Cartan geometries. Contents 1 Introduction . 2 2 Rigid geometric structures . 5 2.1 Cartan geometries . 5 2.1.1 Classical examples of Cartan geometries . 7 2.1.2 Rigidity of Cartan geometries . 8 2.2 G-structures . 9 3 The conformal group of a Riemannian manifold . 12 3.1 The theorem of Obata and Ferrand . 12 3.2 Ideas of the proof of the Ferrand-Obata theorem . 13 3.3 Generalizations to rank one parabolic geometries . -

Math 203 Lecture 12 Notes: Tessellation – a Complete Covering
Math 103 Lecture #12 class notes page 1 Math 203 Lecture 12 notes: Note: this lecture is very “visual,” i.e., lots of pictures illustrating tessellation concepts Tessellation – a complete covering of a plane by one or more figures in a repeating pattern, with no overlapping. There are only 3 regular polygons that can tessellate a plane without being combined with other polygons: 1) equilateral triangle 2)square 3) regular hexagon. Once a basic design has been constructed, it may be extended through 3 different transformations: translation (slide), rotation (turn), or reflection (flip). FLIP: A figure has line symmetry if there is a line of reflection such that each point in the figure can be reflected into the figure. Line symmetry is sometimes referred to as mirror symmetry, axial, symmetry, bilateral symmetry, or reflective symmetry. The line of symmetry may be vertical, horizontal, or slanted. A figure may have one or more lines of symmetry, or none. Regular polygons with n sides have n lines of symmetry. Any line through the center of a circle is a line of symmetry for a circle. The circle is the most symmetric of all plane figures. The musical counterpart of horizontal reflection (across the y-axis) is called retrogression, while vertical reflection (across the x-axis) is called inversion. SLIDE: Translation (or slide translation) is one in which a figure moves without changing size or shape. It can be thought of as a motion that moves the figure from one location in a plane to another. The distance that the figure moves, or slides, is called the magnitude.