1. Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Electronic Governor Device for Internal Combustion Engine for Agricultural
Europaisches Patentamt (19) European Patent Office Office europeenpeen des brevets EP0 814 391 B1 (12) EUROPEAN PATENT SPECIFICATION (45) Date of publication and mention (51) intci.6: G05B 19/00, F02D 41/24 of the grant of the patent: 24.03.1999 Bulletin 1999/12 (21) Application number: 96830588.8 (22) Date of filing: 19.11.1996 (54) Electronic governor device for internal combustion engine for agricultural tractor with plug-in memory card storing typical engine data obtained during factory testing Elektronische Regeleinrichtung fur Verbrennungsmotoren landwirtschaftlicher Traktoren mit steckbarer Speicherkarte, die beim Test in der Fabrik ermittelte typische Daten des Motors enthalt Dispositif de regulation pour moteur a combustion de tracteur agriculturel avec carte de memoire enfichable contenant des donnees typiques du moteur obtenues en test en usine (84) Designated Contracting States: (72) Inventor: Esposito, Giovanni DE FR GB 20044 Bernareggio, Milano (IT) (30) Priority: 17.06.1996 IT TO960518 (74) Representative: Buzzi, Franco et al c/o Buzzi, Notaro & Antonielli d'Oulx Sri, (43) Date of publication of application: Corso Fiume, 6 29.12.1997 Bulletin 1997/52 10133 Torino (IT) (73) Proprietor: SAME DEUTZ-FAHR S.P.A. (56) References cited: 24047 Treviglio (Bergamo) (IT) DE-A- 3 735 005 US-A- 5 056 026 DO O) CO 00 Note: Within nine months from the publication of the mention of the grant of the European patent, any person may give notice the Patent Office of the Notice of shall be filed in o to European opposition to European patent granted. opposition a written reasoned statement. It shall not be deemed to have been filed until the opposition fee has been paid. -
Propeller Operation and Malfunctions Basic Familiarization for Flight Crews
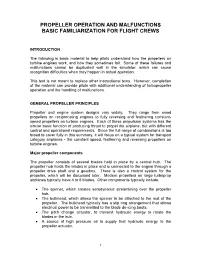
PROPELLER OPERATION AND MALFUNCTIONS BASIC FAMILIARIZATION FOR FLIGHT CREWS INTRODUCTION The following is basic material to help pilots understand how the propellers on turbine engines work, and how they sometimes fail. Some of these failures and malfunctions cannot be duplicated well in the simulator, which can cause recognition difficulties when they happen in actual operation. This text is not meant to replace other instructional texts. However, completion of the material can provide pilots with additional understanding of turbopropeller operation and the handling of malfunctions. GENERAL PROPELLER PRINCIPLES Propeller and engine system designs vary widely. They range from wood propellers on reciprocating engines to fully reversing and feathering constant- speed propellers on turbine engines. Each of these propulsion systems has the similar basic function of producing thrust to propel the airplane, but with different control and operational requirements. Since the full range of combinations is too broad to cover fully in this summary, it will focus on a typical system for transport category airplanes - the constant speed, feathering and reversing propellers on turbine engines. Major propeller components The propeller consists of several blades held in place by a central hub. The propeller hub holds the blades in place and is connected to the engine through a propeller drive shaft and a gearbox. There is also a control system for the propeller, which will be discussed later. Modern propellers on large turboprop airplanes typically have 4 to 6 blades. Other components typically include: The spinner, which creates aerodynamic streamlining over the propeller hub. The bulkhead, which allows the spinner to be attached to the rest of the propeller. -
M3 Speed Governor and Overspeed Protective Device M3
M3 M3M3 Speed governor and overspeed protective (1971)(cont) (Rev.1 device 1984) (Rev.2 M3.1 Speed governor and overspeed protective device for main internal combustion 1986) engines (Rev.3 1990) 3.1.1 Each main engine is to be fitted with a speed governor so adjusted that the engine (Rev.4 speed cannot exceed the rated speed by more than 15%. June 2002) (Corr.1 3.1.2 In addition to this speed governor each main engine having a rated power of 220 kW Aug 2003) and above, and which can be declutched or which drives a controllable pitch propeller, is to (Rev.5 be fitted with a separate overspeed protective device so adjusted that the engine speed Feb 2006) cannot exceed the rated speed by more than 20%. Equivalent arrangements may be (Rev.6 accepted upon special consideration. The overspeed protective device, including its driving Nov 2018) mechanism, has to be independent from the required governor. 3.1.3 When electronic speed governors of main internal combustion engines form part of a remote control system, they are to comply with UR M43.8 and M43.10 or M47 and namely with the following conditions: - if lack of power to the governor may cause major and sudden changes in the present speed and direction of thrust of the propeller, back up power supply is to be provided; - local control of the engines is always to be possible, as required by M43.10, and, to this purpose, from the local control position it is to be possible to disconnect the remote signal, bearing in mind that the speed control according to UR M3.1, subparagraph 3.1.1, is not available unless an additional separate governor is provided for such local mode of control. -

Alabama Commission on Improving State Government
Office of the Governor - Robert Bentley Alabama Commission on Improving State Government Phase One Report 2011 Page | 1 Table of Contents Alabama Commission on Improving State Government Phase One Report Section Name Page Letter from the Chairman 2 Executive Order 4 3 - 4 Press Releases 5 - 10 Alabama Commission on Improving State Government Members 11 - 18 Executive Overview 19 - 21 Summary of Meetings and Methodology 22 Phase One: Recommendations for Executive Action and Executive Orders 23 - 46 Phase One: Recommendations Reviewed but Do Not Require Further Study 47 - 52 Phase Two: Recommendations Reviewed but Require Further Study 53 - 63 Conclusion 64 Appendix A: Executive Subcommittee Report 65 - 67 Appendix B: Memorandums and Letters 68 - 77 Appendix C: Consolidation Considerations 78 - 82 Appendix D: Website Submissions by Web Category 83 - 111 Appendix E: Website Submissions by Title 112 - 123 References 124 Page | 2 July 15, 2011 The Honorable Robert Bentley Governor of Alabama State Capitol Montgomery, Alabama Dear Governor Bentley: On behalf of the members appointed to the Commission, we are pleased to present to you this final report of the Alabama Commission on Improving State Government. The Commission was charged with the task of working with the Legislature and the Governor’s Policy Office to analyze and explore new ways to reduce government spending with minimal or no reduction to essential state services. From its inception, the focus of this Commission has been on the immediate implementation of recommendations, rather than merely establishing a set of recommendations to be placed in a report. In December 2008, the National Bureau of Economic Research announced that the U.S. -

Chapter 1. Introduction
1 Introduction 1.1 Introduction Control systems are ubiquitous. They appear in our homes, in cars, in industry and in systems for communication and transport, just to give a few examples. Control is increasingly becoming mission critical, processes will fail if the control does not work. Control has been important for design of experimental equipment and instrumentation used in basic sciences and will be even more so in the future. Principles of control also have an impact on such diverse fields as economics, biology, and medicine. Control, like many other branches of engineering science, has devel- oped in the same pattern as natural science. Although there are strong similarities between natural science and engineering science it is impor- tant to realize that there are some fundamental differences. The inspi- ration for natural science is to understand phenomena in nature. This has led to a strong emphasis on analysis and isolation of specific phe- nomena, so called reductionism. A key goal of natural science is to find basic laws that describe nature. The inspiration of engineering science is to understand, invent, and design man-made technical systems. This places much more emphasis on interaction and design. Interaction is a key feature of practically all man made systems. It is therefore essential to replace reductionism with a holistic systems approach. The technical systems are now becoming so complex that they pose challenges compa- rable to the natural systems. A fundamental goal of engineering science is to find system principles that make it possible to effectively deal with complex systems. Feedback, which is at the heart of automatic control, is an example of such a principle. -

Tecumseh Service Manual 4 Cycle 3-11Hp Pp29-36
This Manual is a FREE Download www.allotment-garden.org Throttle Lever Remove the throttle lever and spring and file off the peened end of the throttle shaft until the lever can be removed. Install the throttle spring and lever on the new carburetor with the self-tapping screw furnished. If dust seals are furnished, install them under the return spring. Idle Speed Adjustment Screw Remove the screw assembly from the original carburetor and install it in the new carburetor. Turn it in until it contacts the throttle lever. Then an additional 1-1/2 turns for a static setting. Final Checks Consult the service section under “Pre-sets and Adjustments” and follow the adjustment procedures before placing the carburetor on the engine. FLOAT TYPE CARBURETOR DIAPHRAGM TYPE CARBURETOR / 4 !/ 0 ,/ # , # **" & ,! . ( ,/ # "( ! !0 !/ 0 4 ,! . ( 4 ( ,/ # ,* " & ,* " & ,* " & . ,/ ,* " & . ,/ . ,/ # , # , # , / ,/ # / ,/% !/ 0 , * #% " ,* " & ,/% ,! . ,/% "( (-%, $ ,/ 0 ,! . !/ , ,! . ,/ #% #" " & ,* " & 5 5 " & ,/% ,! . , ( ! "* " ( . ,* ( (-%, $ ,* " & ! "* ,! . (" */ &$ /"&/ ,* ( (-%, # $ ,! . (" */ &$ & ,0 # ,/ # (" */ &$ ! 4 # ' . * "$ #" " & (" */ &$ ' . % . ,/ ! 4 ,! . /"&/ ,* ( ' . 61 62 25 CHAPTER 4 GOVERNORS AND LINKAGE GENERAL INFORMATION This chapter includes governor assembly and linkage illustrations to aid in governor or speed control assembly. Tecumseh 4 cycle engines are equipped with mechanical type governors. The governor’s function is to maintain a constant R.P.M. setting when engine loads are added or taken away. Mechanical type governors are driven off the engine’s camshaft gear. Changes in engine R.P.M. cause the governor to move the solid link that is connected from the governor lever to the throttle in the carburetor. The throttle is opened when the engine R.P.M. drops and closes as the engine load is removed. OPERATION As the speed of the engine increases, the governor weights (on the governor gear) move outward by centrifugal force. -

Design of Electronic Control Governor for a Single Cylinder Gasoline Engine Based on an Intelligent Sensing Algorithm
Engenharia Agrícola ISSN: 1809-4430 (on-line) www.engenhariaagricola.org.br Doi: http://dx.doi.org/10.1590/1809-4430-Eng.Agric.v40n4p495-502/2020 DESIGN OF ELECTRONIC CONTROL GOVERNOR FOR A SINGLE CYLINDER GASOLINE ENGINE BASED ON AN INTELLIGENT SENSING ALGORITHM Lixiang Sun1*, Yan Yang1, Fang Ma1, Wen Jing1, Yibo Zheng1, Hao Wu1 1*Corresponding author. Yancheng Polytechnic College/ Yancheng, China. E-mail: [email protected] | ORCID ID: https://orcid.org/0000-0002-8030-1131 KEYWORDS ABSTRACT electronic control, At present, most large machinery and vehicle engines are electronically controlled but intelligent perception, their electronic control systems are too expensive to be popularised and applied in small dynamic and steady gasoline engines with relatively low prices. Therefore, small gasoline engines still use state performance, mechanical speed regulators. Mechanical speed regulators not only have the defects of power, hunting. inertia lag, friction resistance, inherent speed regulation and the like, but also have the disadvantage that dynamic performance and steady performance cannot be combined, which is not suitable for the increasingly improved speed regulation performance of gasoline engines. This paper describes the design of an electronically controlled intelligent governor for small gasoline engines. Starting from a low cost, it adopts the idea of “replacing part of the hardware with an intelligent sensing algorithm” and proposes an intelligent sensing algorithm scheme. It combines the “coarse tuning” of MAP and the “fine tuning” of adaptive expert PID. The system is proved experimentally and it not only overcomes the inherent defects of a mechanical governor and realises programmable speed regulation, but it also obtains good dynamic and steady performance, improves the power output of the engine, relieves the trouble of engine travelling and improves the freedom of carburetor matching. -

Chapter One Introduction
Chapter One Introduction Feedback is a central feature of life. The process of feedback governs how we grow, respond to stress and challenge, and regulate factors such as body temperature, blood pressure and cholesterol level. The mechanisms operate at every level, from the interaction of proteins in cells to the interaction of organisms in complex ecologies. M. B. Hoagland and B. Dodson, The Way Life Works, 1995 [99]. In this chapter we provide an introduction to the basic concept of feedback and the related engineering discipline of control. We focus on both historical and current examples, with the intention of providing the context for current tools in feedback and control. Much of the material in this chapter is adapted from [155], and the authors gratefully acknowledge the contributions of Roger Brockett and Gunter Stein to portions of this chapter. 1.1 What Is Feedback? A dynamical system is a system whose behavior changes over time, often in response to external stimulation or forcing. The term feedback refers to a situation in which two (or more) dynamical systems are connected together such that each system influences the other and their dynamics are thus strongly coupled. Simple causal reasoning about a feedback system is difficult because the first system influences the second and the second system influences the first, leading to a circular argument. This makes reasoning based on cause and effect tricky, and it is necessary to analyze the system as a whole. A consequence of this is that the behavior of feedback systems is often counterintuitive, and it is therefore necessary to resort to formal methods to understand them. -

Ford 8N Tractor Governor Overhaul
Ford 8N Tractor Overhauls by [email protected] Every time I overhaul something on my 1952 Ford 8N Tractor, I photograph the event and develop another Overhaul Page. Here are the Governor Overhaul Pages: Page 1 Page 2 Page 3 Page 4 Page 5 ©2000-9, Stewart Instruments, Inc. 928-778-6988 Ford 8N Tractor Overhauls by [email protected] Here's the Governor Overhaul Page 1. The Governor maintains a constant engine speed by manipulating the carburetor throttle control based on the calibrated position of a set of spinning steel balls connected by gear to the camshaft. As engine speed decreases, the balls spin with less centrifugal force and collapse toward the center of their shaft which causes a fork actuated plunger to increase the throttle position until the engine regains its speed. The Governor is lubricated by an oil line connected to the oil filter, and drives a proofmeter (mechanical tachometer and hour meter) through a cable. There are two bolts that retain the Governor housing to the engine. Mark the linkage between the Governor and the carburetor and the dash-mounted speed control lever. Use masking tape and a marking pen to clearly show how they are to be reconnected after overhaul. Believe me, swapping the linkage will make your tractor run very poorly, if at all. One machine screw retains the drive gear and shaft to the Governor housing. The overhaul kit consists of new steel balls, new lower race and bearing. new thrust ballbearings and gasket. The Governor fails by developing flat spots on the steel balls and corresponding wear marks on the lower race. -

Centrifugal Governors
UNIT V MECHANISMS FOR CONTROL Governors - Types - Centrifugal governors – Porter, Proel and Hartnell Governors – Characteristics –Sensitivity– Stability – Hunting – Isochronisms – equilibrium speed - Effect of friction - Controlling Force Introduction The function of a governor is to regulate the mean speed of an engine, when there are variations in the load e.g. when the load on an engine increases, its speed decreases, therefore it becomes necessary to increase the supply of working fluid. On the other hand, when the load on the engine decreases, its speed increases and thus less working fluid is required. The governor automatically controls the supply of working fluid to the engine with the varying load conditions and keeps the mean speed within certain limits. A little consideration will show, that when the load increases, the configuration of the governor changes and a valve is moved to increase the supply of the working fluid ; conversely, when the load decreases, the engine speed increases and the governor decreases the supply of working fluid. Types of Governors The governors may, broadly, be classified as 1. Centrifugal governors, 2. Inertia governors. Centrifugal Governors The centrifugal governors are based on the balancing of centrifugal force on the rotating balls by an equal and opposite radial force, known as the controlling force*.It consists of two balls of equal mass, which are attached to the arms as shown in Fig. 1. These balls are known as governor balls or fly balls. The balls revolve with a spindle, which is driven by the engine through bevel gears. The upper ends of the arms are pivoted to the spindle, so that the balls may rise up or fall down as they revolve about the vertical axis. -

From Wikipedia, the Free Encyclopedia Audi Type Private Company
Audi From Wikipedia, the free encyclopedia Audi Private company Type (FWB Xetra: NSU) Industry Automotive industry Zwickau, Germany (16 July Founded 1909)[1] Founder(s) August Horch Headquarters Ingolstadt, Germany Production locations: Germany: Ingolstadt & Neckarsulm Number of Hungary: Győr locations Belgium: Brussels China: Changchun India: Aurangabad Brazil: Curitiba Area served Worldwide Rupert Stadler Key people Chairman of the Board of Management, Wolfgang Egger Head of Design Products Automobiles, Engines Production 1,143,902 units (2010) output (only Audi brand) €35.441 billion (2010) Revenue (US$52.57 billion USD) (including subsidiaries) €1.850 billion (2009) Profit (US$2.74 billion USD) €16.832 billion (2009) Total assets (US$25 billion USD) €3.451 billion (2009) Total equity (US$5.12 billion USD) Employees 46,372 (2009)[2] Parent Volkswagen Group Audi do Brasil e Cia (Curitiba, Brazil) Audi Hungaria Motor Kft. (Györ, Hungary) Audi Senna Ltda. (Brazil) Automobili Lamborghini Subsidiaries Holding S.p.A (Sant'Agata Bolognese, Italy) Autogerma S.p.A. (Verona, Italy) quattro GmbH (Neckarsulm, Germany) Website audi.com Audi AG (Xetra: NSU) is a German automobile manufacturer, from supermini to crossover SUVs in various body styles and price ranges that are marketed under the Audi brand (German pronunciation: [ˈaʊdi]), positioned as the premium brand within the Volkswagen Group.[3] The company is headquartered in Ingolstadt, Germany, and has been a wholly owned (99.55%)[4] subsidiary of Volkswagen AG since 1966, following a phased purchase of its predecessor, Auto Union, from its former owner, Daimler-Benz. Volkswagen relaunched the Audi brand with the 1965 introduction of the Audi F103 series. -

HW68031 E Governor
HW68031E Governor Adjusting and Trouble-Shooting the Governor Adjusting the Governor adjust Speed Lever (B) to get the desired speed, and 1. Move the Speed Lever (B) to put spring tension on recheck engine under a load. Repeat this procedure governor and adjust Throttle Rod (A) to give about until desired speed and regulation is reached. 1/16 inch clearance between carburetor lever and 6. Adjust High-Speed Top Screw (D) as required. wide-open stop on carburetor. Remove spring 7. If the engine Hunts at maximum speed, no-load tension with Lever (B). condition, turn Surge Screw (E) clockwise into 2. Start engine and allow to warm up to normal governor until hunting just stops and tighten locknut. operating temperature. Caution: Do not turn screw (E) in far enough to 3. Move Speed Lever (B) to increase engine speed to increase engine speed. desired rangz. 4. Check engine under a load. If the drop in speed between Load and No-load is too much, adjust Trouble shooting the Governor Screw (C) to move spring closer to hexagonal hub, Full Load Surge (A) re-adjust Speed Lever (B) to get the desired speed, 1. Shorten Throttle rod two or three turns at the rod- and recheck engine under a load. Repeat this end ball joint. procedure as required until desired speed and 2. Check for extra rich or extra lean fueYair mixture at regulation is reached. the carburetor. 5. To stabilize the engine, or to increase the drop in 3. Look for air leaks caused by a loose intake manifold.