SH-4 32-Bit CPU Core Architecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ADSP-21065L SHARC User's Manual; Chapter 2, Computation
&20387$7,2181,76 Figure 2-0. Table 2-0. Listing 2-0. The processor’s computation units provide the numeric processing power for performing DSP algorithms, performing operations on both fixed-point and floating-point numbers. Each computation unit executes instructions in a single cycle. The processor contains three computation units: • An arithmetic/logic unit (ALU) Performs a standard set of arithmetic and logic operations in both fixed-point and floating-point formats. • A multiplier Performs floating-point and fixed-point multiplication as well as fixed-point dual multiply/add or multiply/subtract operations. •A shifter Performs logical and arithmetic shifts, bit manipulation, field deposit and extraction operations on 32-bit operands and can derive exponents as well. ADSP-21065L SHARC User’s Manual 2-1 PM Data Bus DM Data Bus Register File Multiplier Shifter ALU 16 × 40-bit MR2 MR1 MR0 Figure 2-1. Computation units block diagram The computation units are architecturally arranged in parallel, as shown in Figure 2-1. The output from any computation unit can be input to any computation unit on the next cycle. The computation units store input operands and results locally in a ten-port register file. The Register File is accessible to the processor’s pro- gram memory data (PMD) bus and its data memory data (DMD) bus. Both of these buses transfer data between the computation units and internal memory, external memory, or other parts of the processor. This chapter covers these topics: • Data formats • Register File data storage and transfers -
Most Computer Instructions Can Be Classified Into Three Categories
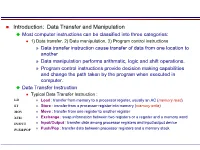
Introduction: Data Transfer and Manipulation Most computer instructions can be classified into three categories: 1) Data transfer, 2) Data manipulation, 3) Program control instructions » Data transfer instruction cause transfer of data from one location to another » Data manipulation performs arithmatic, logic and shift operations. » Program control instructions provide decision making capabilities and change the path taken by the program when executed in computer. Data Transfer Instruction Typical Data Transfer Instruction : LD » Load : transfer from memory to a processor register, usually an AC (memory read) ST » Store : transfer from a processor register into memory (memory write) MOV » Move : transfer from one register to another register XCH » Exchange : swap information between two registers or a register and a memory word IN/OUT » Input/Output : transfer data among processor registers and input/output device PUSH/POP » Push/Pop : transfer data between processor registers and a memory stack MODE ASSEMBLY REGISTER TRANSFER CONVENTION Direct Address LD ADR ACM[ADR] Indirect Address LD @ADR ACM[M[ADR]] Relative Address LD $ADR ACM[PC+ADR] Immediate Address LD #NBR ACNBR Index Address LD ADR(X) ACM[ADR+XR] Register LD R1 ACR1 Register Indirect LD (R1) ACM[R1] Autoincrement LD (R1)+ ACM[R1], R1R1+1 8 Addressing Mode for the LOAD Instruction Data Manipulation Instruction 1) Arithmetic, 2) Logical and bit manipulation, 3) Shift Instruction Arithmetic Instructions : NAME MNEMONIC Increment INC Decrement DEC Add ADD Subtract SUB Multiply -

The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and Computer
Microprocessors (0630371) Fall 2010/2011 – Lecture Notes # 1 The Intel Microprocessors: Architecture, Programming and Interfacing Introduction to the Microprocessor and computer Outline of the Lecture Evolution of programming languages. Microcomputer Architecture. Instruction Execution Cycle. Evolution of programming languages: Machine language - the programmer had to remember the machine codes for various operations, and had to remember the locations of the data in the main memory like: 0101 0011 0111… Assembly Language - an instruction is an easy –to- remember form called a mnemonic code . Example: Assembly Language Machine Language Load 100100 ADD 100101 SUB 100011 We need a program called an assembler that translates the assembly language instructions into machine language. High-level languages Fortran, Cobol, Pascal, C++, C# and java. We need a compiler to translate instructions written in high-level languages into machine code. Microprocessor-based system (Micro computer) Architecture Data Bus, I/O bus Memory Storage I/O I/O Registers Unit Device Device Central Processing Unit #1 #2 (CPU ) ALU CU Clock Control Unit Address Bus The figure shows the main components of a microprocessor-based system: CPU- Central Processing Unit , where calculations and logic operations are done. CPU contains registers , a high-frequency clock , a control unit ( CU ) and an arithmetic logic unit ( ALU ). o Clock : synchronizes the internal operations of the CPU with other system components using clock pulsing at a constant rate (the basic unit of time for machine instructions is a machine cycle or clock cycle) One cycle A machine instruction requires at least one clock cycle some instruction require 50 clocks. o Control Unit (CU) - generate the needed control signals to coordinate the sequencing of steps involved in executing machine instructions: (fetches data and instructions and decodes addresses for the ALU). -
MIPS Architecture • MIPS (Microprocessor Without Interlocked Pipeline Stages) • MIPS Computer Systems Inc
Spring 2011 Prof. Hyesoon Kim MIPS Architecture • MIPS (Microprocessor without interlocked pipeline stages) • MIPS Computer Systems Inc. • Developed from Stanford • MIPS architecture usages • 1990’s – R2000, R3000, R4000, Motorola 68000 family • Playstation, Playstation 2, Sony PSP handheld, Nintendo 64 console • Android • Shift to SOC http://en.wikipedia.org/wiki/MIPS_architecture • MIPS R4000 CPU core • Floating point and vector floating point co-processors • 3D-CG extended instruction sets • Graphics – 3D curved surface and other 3D functionality – Hardware clipping, compressed texture handling • R4300 (embedded version) – Nintendo-64 http://www.digitaltrends.com/gaming/sony- announces-playstation-portable-specs/ Not Yet out • Google TV: an Android-based software service that lets users switch between their TV content and Web applications such as Netflix and Amazon Video on Demand • GoogleTV : search capabilities. • High stream data? • Internet accesses? • Multi-threading, SMP design • High graphics processors • Several CODEC – Hardware vs. Software • Displaying frame buffer e.g) 1080p resolution: 1920 (H) x 1080 (V) color depth: 4 bytes/pixel 4*1920*1080 ~= 8.3MB 8.3MB * 60Hz=498MB/sec • Started from 32-bit • Later 64-bit • microMIPS: 16-bit compression version (similar to ARM thumb) • SIMD additions-64 bit floating points • User Defined Instructions (UDIs) coprocessors • All self-modified code • Allow unaligned accesses http://www.spiritus-temporis.com/mips-architecture/ • 32 64-bit general purpose registers (GPRs) • A pair of special-purpose registers to hold the results of integer multiply, divide, and multiply-accumulate operations (HI and LO) – HI—Multiply and Divide register higher result – LO—Multiply and Divide register lower result • a special-purpose program counter (PC), • A MIPS64 processor always produces a 64-bit result • 32 floating point registers (FPRs). -
SH-1/SH-2/SH-DSP Programming Manual
Hitachi SuperH™ RISC Engine SH-1/SH-2/SH-DSP Programming Manual ADE-602-063C Rev. 4.0 5/13/99 Hitachi ,Ltd Cautions 1. Hitachi neither warrants nor grants licenses of any rights of Hitachi’s or any third party’s patent, copyright, trademark, or other intellectual property rights for information contained in this document. Hitachi bears no responsibility for problems that may arise with third party’s rights, including intellectual property rights, in connection with use of the information contained in this document. 2. Products and product specifications may be subject to change without notice. Confirm that you have received the latest product standards or specifications before final design, purchase or use. 3. Hitachi makes every attempt to ensure that its products are of high quality and reliability. However, contact Hitachi’s sales office before using the product in an application that demands especially high quality and reliability or where its failure or malfunction may directly threaten human life or cause risk of bodily injury, such as aerospace, aeronautics, nuclear power, combustion control, transportation, traffic, safety equipment or medical equipment for life support. 4. Design your application so that the product is used within the ranges guaranteed by Hitachi particularly for maximum rating, operating supply voltage range, heat radiation characteristics, installation conditions and other characteristics. Hitachi bears no responsibility for failure or damage when used beyond the guaranteed ranges. Even within the guaranteed ranges, consider normally foreseeable failure rates or failure modes in semiconductor devices and employ systemic measures such as fail-safes, so that the equipment incorporating Hitachi product does not cause bodily injury, fire or other consequential damage due to operation of the Hitachi product. -

Unit 8 : Microprocessor Architecture
Unit 8 : Microprocessor Architecture Lesson 1 : Microcomputer Structure 1.1. Learning Objectives On completion of this lesson you will be able to : ♦ draw the block diagram of a simple computer ♦ understand the function of different units of a microcomputer ♦ learn the basic operation of microcomputer bus system. 1.2. Digital Computer A digital computer is a multipurpose, programmable machine that reads A digital computer is a binary instructions from its memory, accepts binary data as input and multipurpose, programmable processes data according to those instructions, and provides results as machine. output. 1.3. Basic Computer System Organization Every computer contains five essential parts or units. They are Basic computer system organization. i. the arithmetic logic unit (ALU) ii. the control unit iii. the memory unit iv. the input unit v. the output unit. 1.3.1. The Arithmetic and Logic Unit (ALU) The arithmetic and logic unit (ALU) is that part of the computer that The arithmetic and logic actually performs arithmetic and logical operations on data. All other unit (ALU) is that part of elements of the computer system - control unit, register, memory, I/O - the computer that actually are there mainly to bring data into the ALU to process and then to take performs arithmetic and the results back out. logical operations on data. An arithmetic and logic unit and, indeed, all electronic components in the computer are based on the use of simple digital logic devices that can store binary digits and perform simple Boolean logic operations. Data are presented to the ALU in registers. These registers are temporary storage locations within the CPU that are connected by signal paths of the ALU. -

Superh RISC Engine SH-1/SH-2
SuperH RISC Engine SH-1/SH-2 Programming Manual September 3, 1996 Hitachi America Ltd. Notice When using this document, keep the following in mind: 1. This document may, wholly or partially, be subject to change without notice. 2. All rights are reserved: No one is permitted to reproduce or duplicate, in any form, the whole or part of this document without Hitachi’s permission. 3. Hitachi will not be held responsible for any damage to the user that may result from accidents or any other reasons during operation of the user’s unit according to this document. 4. Circuitry and other examples described herein are meant merely to indicate the characteristics and performance of Hitachi’s semiconductor products. Hitachi assumes no responsibility for any intellectual property claims or other problems that may result from applications based on the examples described herein. 5. No license is granted by implication or otherwise under any patents or other rights of any third party or Hitachi, Ltd. 6. MEDICAL APPLICATIONS: Hitachi’s products are not authorized for use in MEDICAL APPLICATIONS without the written consent of the appropriate officer of Hitachi’s sales company. Such use includes, but is not limited to, use in life support systems. Buyers of Hitachi’s products are requested to notify the relevant Hitachi sales offices when planning to use the products in MEDICAL APPLICATIONS. Introduction The SuperH RISC engine family incorporates a RISC (Reduced Instruction Set Computer) type CPU. A basic instruction can be executed in one clock cycle, realizing high performance operation. A built-in multiplier can execute multiplication and addition as quickly as DSP. -
HOW FAST? the Current Intel® Core™ Processor Has 43,000,000% More Transistors Than the 4004 Processor
40yrs of Intel® microprocessor innovation Following Moore’s Law the whole way Intel co-founder Gordon Moore once made a famous prediction that transistor The world’s first microprocessor count for computer chips would —the Intel® 4004—was “born” in 1971, double every two years. 10 years before the first PC came along. Using Moore’s Law as a guiding principle, Intel has provided ever-increasing functionality, performance and energy efficiency to its products. Just think: What if the world had followed this golden rule the last 40 years? HOW FAST? The current Intel® Core™ processor has 43,000,000% more transistors than the 4004 processor. If a village with a 1971 population of 100 had grown as quickly, it would now be by far the largest city in the world. War and Peace? Wait a second. The 4004 processor executed 92,000 instructions per second, while today’s Intel® Core™ i7 processor can run 92 billion. If your typing had accelerated at that rate, you’d be able to type Tolstoy’s classic in just over 1 second. 0101010101010101… You would need 25,000 years to turn a light switch on and off 1.5 trillion times, but today’s processors can do that in less than a second. A PENNY SAVED… When released in 1981, the first well- equipped IBM PC cost about $11,250 in inflation-adjusted 2011 dollars. Today, much more powerful PCs are available in the $500 range (or even less). Fly me to the moon If space travel had come down in price as much as transistors have since 1971, the Apollo 11 mission, which cost around $355 million in 1969, would cost about as much as a latte. -

The Central Processor Unit
Systems Architecture The Central Processing Unit The Central Processing Unit – p. 1/11 The Computer System Application High-level Language Operating System Assembly Language Machine level Microprogram Digital logic Hardware / Software Interface The Central Processing Unit – p. 2/11 CPU Structure External Memory MAR: Memory MBR: Memory Address Register Buffer Register Address Incrementer R15 / PC R11 R7 R3 R14 / LR R10 R6 R2 R13 / SP R9 R5 R1 R12 R8 R4 R0 User Registers Booth’s Multiplier Barrel IR Shifter Control Unit CPSR 32-Bit ALU The Central Processing Unit – p. 3/11 CPU Registers Internal Registers Condition Flags PC Program Counter C Carry IR Instruction Register Z Zero MAR Memory Address Register N Negative MBR Memory Buffer Register V Overflow CPSR Current Processor Status Register Internal Devices User Registers ALU Arithmetic Logic Unit Rn Register n CU Control Unit n = 0 . 15 M Memory Store SP Stack Pointer MMU Mem Management Unit LR Link Register Note that each CPU has a different set of User Registers The Central Processing Unit – p. 4/11 Current Process Status Register • Holds a number of status flags: N True if result of last operation is Negative Z True if result of last operation was Zero or equal C True if an unsigned borrow (Carry over) occurred Value of last bit shifted V True if a signed borrow (oVerflow) occurred • Current execution mode: User Normal “user” program execution mode System Privileged operating system tasks Some operations can only be preformed in a System mode The Central Processing Unit – p. 5/11 Register Transfer Language NAME Value of register or unit ← Transfer of data MAR ← PC x: Guard, only if x true hcci: MAR ← PC (field) Specific field of unit ALU(C) ← 1 (name), bit (n) or range (n:m) R0 ← MBR(0:7) Rn User Register n R0 ← MBR num Decimal number R0 ← 128 2_num Binary number R1 ← 2_0100 0001 0xnum Hexadecimal number R2 ← 0x40 M(addr) Memory Access (addr) MBR ← M(MAR) IR(field) Specified field of IR CU ← IR(op-code) ALU(field) Specified field of the ALU(C) ← 1 Arithmetic and Logic Unit The Central Processing Unit – p. -
Thumb® 16-Bit Instruction Set Quick Reference Card
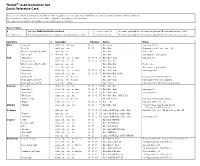
Thumb® 16-bit Instruction Set Quick Reference Card This card lists all Thumb instructions available on Thumb-capable processors earlier than ARM®v6T2. In addition, it lists all Thumb-2 16-bit instructions. The instructions shown on this card are all 16-bit in Thumb-2, except where noted otherwise. All registers are Lo (R0-R7) except where specified. Hi registers are R8-R15. Key to Tables § See Table ARM architecture versions. <loreglist+LR> A comma-separated list of Lo registers. plus the LR, enclosed in braces, { and }. <loreglist> A comma-separated list of Lo registers, enclosed in braces, { and }. <loreglist+PC> A comma-separated list of Lo registers. plus the PC, enclosed in braces, { and }. Operation § Assembler Updates Action Notes Move Immediate MOVS Rd, #<imm> N Z Rd := imm imm range 0-255. Lo to Lo MOVS Rd, Rm N Z Rd := Rm Synonym of LSLS Rd, Rm, #0 Hi to Lo, Lo to Hi, Hi to Hi MOV Rd, Rm Rd := Rm Not Lo to Lo. Any to Any 6 MOV Rd, Rm Rd := Rm Any register to any register. Add Immediate 3 ADDS Rd, Rn, #<imm> N Z C V Rd := Rn + imm imm range 0-7. All registers Lo ADDS Rd, Rn, Rm N Z C V Rd := Rn + Rm Hi to Lo, Lo to Hi, Hi to Hi ADD Rd, Rd, Rm Rd := Rd + Rm Not Lo to Lo. Any to Any T2 ADD Rd, Rd, Rm Rd := Rd + Rm Any register to any register. Immediate 8 ADDS Rd, Rd, #<imm> N Z C V Rd := Rd + imm imm range 0-255. -

Superh Family Catalog 3A
SuperH® Family of Microcontrollers and Microprocessors ® 2006.4 Renesas Technology America SuperH® Family of Microcontrollers & Microprocessors 2006 Catalog Renesas — Your Best Decision for Microcontrollers and Microprocessors Choose for your next design; use for all your future ones. Renesas Technology, the leading global supplier of microcontrollers and microprocessors for embedded systems, especially flash microcomputers, makes it easy to select the right device for any application. The hundreds of devices in our H8®, M16C™ and SuperH® families, among others, have upwardly compatible architectures and standard platforms covering wide spans of performance, integration, power efficiency and price points. Your choices extend from cost-effective 8-bit microcontrollers to high-performance 16-bit and high-end 32-bit devices. These easy-to-use chips can enable your design innovations now and in the future. Our advanced silicon solutions simplify system optimizations, facilitate design enhancements and diversifications, and help you meet tight cost budgets. Key markets for Renesas microcontrollers and microprocessors include the mobile, automotive and PC/AV fields. For example, we are a leader in devices for car information systems, the technology forerunner in application processors for multimedia mobile phones, and an innovator in devices for power inverter applications. By choosing world-class Renesas solutions, you get highly reliable designs produced in high-quality fabrication facilities, and benefit from ongoing development defined by solid technology roadmaps. You can shorten your system design cycles and improve your time-to-market by taking advantage of our total system support, including software solutions, starter kits, reference platforms, reference designs, and middleware. Expert third-party support is available as well. -

Trends in Processor Architecture
A. González Trends in Processor Architecture Trends in Processor Architecture Antonio González Universitat Politècnica de Catalunya, Barcelona, Spain 1. Past Trends Processors have undergone a tremendous evolution throughout their history. A key milestone in this evolution was the introduction of the microprocessor, term that refers to a processor that is implemented in a single chip. The first microprocessor was introduced by Intel under the name of Intel 4004 in 1971. It contained about 2,300 transistors, was clocked at 740 KHz and delivered 92,000 instructions per second while dissipating around 0.5 watts. Since then, practically every year we have witnessed the launch of a new microprocessor, delivering significant performance improvements over previous ones. Some studies have estimated this growth to be exponential, in the order of about 50% per year, which results in a cumulative growth of over three orders of magnitude in a time span of two decades [12]. These improvements have been fueled by advances in the manufacturing process and innovations in processor architecture. According to several studies [4][6], both aspects contributed in a similar amount to the global gains. The manufacturing process technology has tried to follow the scaling recipe laid down by Robert N. Dennard in the early 1970s [7]. The basics of this technology scaling consists of reducing transistor dimensions by a factor of 30% every generation (typically 2 years) while keeping electric fields constant. The 30% scaling in the dimensions results in doubling the transistor density (doubling transistor density every two years was predicted in 1975 by Gordon Moore and is normally referred to as Moore’s Law [21][22]).