Feedback Mechanisms and Constraints on Climate Sensitivity from a Perturbed Physics Ensemble of General Circulation Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Climate Models and Their Evaluation
8 Climate Models and Their Evaluation Coordinating Lead Authors: David A. Randall (USA), Richard A. Wood (UK) Lead Authors: Sandrine Bony (France), Robert Colman (Australia), Thierry Fichefet (Belgium), John Fyfe (Canada), Vladimir Kattsov (Russian Federation), Andrew Pitman (Australia), Jagadish Shukla (USA), Jayaraman Srinivasan (India), Ronald J. Stouffer (USA), Akimasa Sumi (Japan), Karl E. Taylor (USA) Contributing Authors: K. AchutaRao (USA), R. Allan (UK), A. Berger (Belgium), H. Blatter (Switzerland), C. Bonfi ls (USA, France), A. Boone (France, USA), C. Bretherton (USA), A. Broccoli (USA), V. Brovkin (Germany, Russian Federation), W. Cai (Australia), M. Claussen (Germany), P. Dirmeyer (USA), C. Doutriaux (USA, France), H. Drange (Norway), J.-L. Dufresne (France), S. Emori (Japan), P. Forster (UK), A. Frei (USA), A. Ganopolski (Germany), P. Gent (USA), P. Gleckler (USA), H. Goosse (Belgium), R. Graham (UK), J.M. Gregory (UK), R. Gudgel (USA), A. Hall (USA), S. Hallegatte (USA, France), H. Hasumi (Japan), A. Henderson-Sellers (Switzerland), H. Hendon (Australia), K. Hodges (UK), M. Holland (USA), A.A.M. Holtslag (Netherlands), E. Hunke (USA), P. Huybrechts (Belgium), W. Ingram (UK), F. Joos (Switzerland), B. Kirtman (USA), S. Klein (USA), R. Koster (USA), P. Kushner (Canada), J. Lanzante (USA), M. Latif (Germany), N.-C. Lau (USA), M. Meinshausen (Germany), A. Monahan (Canada), J.M. Murphy (UK), T. Osborn (UK), T. Pavlova (Russian Federationi), V. Petoukhov (Germany), T. Phillips (USA), S. Power (Australia), S. Rahmstorf (Germany), S.C.B. Raper (UK), H. Renssen (Netherlands), D. Rind (USA), M. Roberts (UK), A. Rosati (USA), C. Schär (Switzerland), A. Schmittner (USA, Germany), J. Scinocca (Canada), D. Seidov (USA), A.G. -

Downloaded 10/02/21 08:25 AM UTC
15 NOVEMBER 2006 A R O R A A N D B O E R 5875 The Temporal Variability of Soil Moisture and Surface Hydrological Quantities in a Climate Model VIVEK K. ARORA AND GEORGE J. BOER Canadian Centre for Climate Modelling and Analysis, Meteorological Service of Canada, University of Victoria, Victoria, British Columbia, Canada (Manuscript received 4 October 2005, in final form 8 February 2006) ABSTRACT The variance budget of land surface hydrological quantities is analyzed in the second Atmospheric Model Intercomparison Project (AMIP2) simulation made with the Canadian Centre for Climate Modelling and Analysis (CCCma) third-generation general circulation model (AGCM3). The land surface parameteriza- tion in this model is the comparatively sophisticated Canadian Land Surface Scheme (CLASS). Second- order statistics, namely variances and covariances, are evaluated, and simulated variances are compared with observationally based estimates. The soil moisture variance is related to second-order statistics of surface hydrological quantities. The persistence time scale of soil moisture anomalies is also evaluated. Model values of precipitation and evapotranspiration variability compare reasonably well with observa- tionally based and reanalysis estimates. Soil moisture variability is compared with that simulated by the Variable Infiltration Capacity-2 Layer (VIC-2L) hydrological model driven with observed meteorological data. An equation is developed linking the variances and covariances of precipitation, evapotranspiration, and runoff to soil moisture variance via a transfer function. The transfer function is connected to soil moisture persistence in terms of lagged autocorrelation. Soil moisture persistence time scales are shorter in the Tropics and longer at high latitudes as is consistent with the relationship between soil moisture persis- tence and the latitudinal structure of potential evaporation found in earlier studies. -

Documentation and Software User’S Manual, Version 4.1
The Canadian Seasonal to Interannual Prediction System version 2 (CanSIPSv2) Canadian Meteorological Centre Technical Note H. Lin1, W. J. Merryfield2, R. Muncaster1, G. Smith1, M. Markovic3, A. Erfani3, S. Kharin2, W.-S. Lee2, M. Charron1 1-Meteorological Research Division 2-Canadian Centre for Climate Modelling and Analysis (CCCma) 3-Canadian Meteorological Centre (CMC) 7 May 2019 i Revisions Version Date Authors Remarks 1.0 2019/04/22 Hai Lin First draft 1.1 2019/04/26 Hai Lin Corrected the bias figures. Comments from Ryan Muncaster, Bill Merryfield 1.2 2019/05/01 Hai Lin Figures of CanSIPSv2 uses CanCM4i plus GEM-NEMO 1.3 2019/05/03 Bill Merrifield Added CanCM4i information, sea ice Hai Lin verification, 6.6 and 9 1.4 2019/05/06 Hai Lin All figures of CanSIPSv2 with CanCM4i and GEM-NEMO, made available by Slava Kharin ii © Environment and Climate Change Canada, 2019 Table of Contents 1 Introduction ............................................................................................................................. 4 2 Modifications to models .......................................................................................................... 6 2.1 CanCM4i .......................................................................................................................... 6 2.2 GEM-NEMO .................................................................................................................... 6 3 Forecast initialization ............................................................................................................. -

Large-Scale Tropospheric Transport in the Chemistry–Climate Model Initiative (CCMI) Simulations
Atmos. Chem. Phys., 18, 7217–7235, 2018 https://doi.org/10.5194/acp-18-7217-2018 © Author(s) 2018. This work is distributed under the Creative Commons Attribution 4.0 License. Large-scale tropospheric transport in the Chemistry–Climate Model Initiative (CCMI) simulations Clara Orbe1,2,3,a, Huang Yang3, Darryn W. Waugh3, Guang Zeng4, Olaf Morgenstern 4, Douglas E. Kinnison5, Jean-Francois Lamarque5, Simone Tilmes5, David A. Plummer6, John F. Scinocca7, Beatrice Josse8, Virginie Marecal8, Patrick Jöckel9, Luke D. Oman10, Susan E. Strahan10,11, Makoto Deushi12, Taichu Y. Tanaka12, Kohei Yoshida12, Hideharu Akiyoshi13, Yousuke Yamashita13,14, Andreas Stenke15, Laura Revell15,16, Timofei Sukhodolov15,17, Eugene Rozanov15,17, Giovanni Pitari18, Daniele Visioni18, Kane A. Stone19,20,b, Robyn Schofield19,20, and Antara Banerjee21 1Goddard Earth Sciences Technology and Research (GESTAR), Columbia, MD, USA 2Global Modeling and Assimilation Office, NASA Goddard Space Flight Center, Greenbelt, Maryland, USA 3Department of Earth and Planetary Sciences, Johns Hopkins University, Baltimore, Maryland, USA 4National Institute of Water and Atmospheric Research, Wellington, New Zealand 5National Center for Atmospheric Research (NCAR), Atmospheric Chemistry Observations and Modeling (ACOM) Laboratory, Boulder, USA 6Climate Research Branch, Environment and Climate Change Canada, Montreal, QC, Canada 7Climate Research Branch, Environment and Climate Change Canada, Victoria, BC, Canada 8Centre National de Recherches Météorologiques UMR 3589, Météo-France/CNRS, -

I.1 a Brief History of AOGCM Tuning Methods Over the Past 30 Years Or So Ronald J Stouffer GFDL/NOAA
I.1 A brief history of AOGCM tuning methods over the past 30 years or so Ronald J Stouffer GFDL/NOAA Thirty years ago, when the first global AOGCMs were being developed, the atmospheric component when run with observed SST and sea ice distributions typically had globally av- eraged radiative imbalances of more than 10 w/m**2 at the top of the model atmosphere. Many of these models also had large internal sources/sinks of heat and/or water. Modelers quickly discovered that these atmospheric models, when coupled, experienced large cli- mate drifts due to these imbalances. Modelers started to tune their cloud schemes, chang- ing the cloud distribution and cloud radiative properties, to achieve a better radiation bal- ance. Several modeling groups also started to use flux adjustment schemes to account for the remaining radiation imbalances. As the AOGCMs have improved over the years, the need for flux adjustments has dimin- ished. Higher resolution models are able to have realistic AMOCs (and associated realistic meridional heat transports). Also modelers have addressed many of the heat and water sinks/sources present in the early models. One area of continuing challenge is clouds. As the cloud schemes have become more complex, tuning the model radiatively has become more difficult. There are many more observations of the relating to the detailed processes in modern cloud schemes. Often, it is difficult to tune these cloud schemes to obtain a bet- ter radiation balance and at the same time, have the cloud processes be realistic. This can create a tension between the process scientists and those building the AOGCM. -

Climate Modelling Primer
A Climate Modelling Primer A Climate Modelling Primer, Third Edition. K. McGuffie and A. Henderson-Sellers. © 2005 John Wiley & Sons, Ltd ISBN: 0-470-85750-1 (HB); 0-470-85751-X (PB) A Climate Modelling Primer THIRD EDITION Kendal McGuffie University of Technology, Sydney, Australia and Ann Henderson-Sellers ANSTO Environment, Australia Copyright © 2005 John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex PO19 8SQ, England Telephone (+44) 1243 779777 Email (for orders and customer service enquiries): [email protected] Visit our Home Page on www.wileyeurope.com or www.wiley.com All Rights Reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, scanning or otherwise, except under the terms of the Copyright, Designs and Patents Act 1988 or under the terms of a licence issued by the Copyright Licensing Agency Ltd, 90 Tottenham Court Road, London W1T 4LP, UK, without the permission in writing of the Publisher. Requests to the Publisher should be addressed to the Permissions Department, John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex PO19 8SQ, England, or emailed to [email protected], or faxed to (+44) 1243 770620. Designations used by companies to distinguish their products are often claimed as trademarks. All brand names and product names used in this book are trade names, service marks, trademarks or registered trademarks of their respective owners. The Publisher is not associated with any product or vendor mentioned in this book. This publication is designed to provide accurate and authoritative information in regard to the subject matter covered. -

Constraining Climate Sensitivity from the Seasonal Cycle in Surface Temperature
4224 JOURNAL OF CLIMATE VOLUME 19 Constraining Climate Sensitivity from the Seasonal Cycle in Surface Temperature RETO KNUTTI AND GERALD A. MEEHL National Center for Atmospheric Research,* Boulder, Colorado MYLES R. ALLEN AND DAVID A. STAINFORTH Atmospheric and Oceanic Physics, Oxford University, Oxford, United Kingdom (Manuscript received 16 June 2005, in final form 29 November 2005) ABSTRACT The estimated range of climate sensitivity has remained unchanged for decades, resulting in large un- certainties in long-term projections of future climate under increased greenhouse gas concentrations. Here the multi-thousand-member ensemble of climate model simulations from the climateprediction.net project and a neural network are used to establish a relation between climate sensitivity and the amplitude of the seasonal cycle in regional temperature. Most models with high sensitivities are found to overestimate the seasonal cycle compared to observations. A probability density function for climate sensitivity is then calculated from the present-day seasonal cycle in reanalysis and instrumental datasets. Subject to a number of assumptions on the models and datasets used, it is found that climate sensitivity is very unlikely (5% probability) to be either below 1.5–2 K or above about 5–6.5 K, with the best agreement found for sensitivities between 3 and 3.5 K. This range is narrower than most probabilistic estimates derived from the observed twentieth-century warming. The current generation of general circulation models are within that range but do not sample the highest values. 1. Introduction spheric CO2 concentration, equivalent to a radiative forcing of about 3.7 W mϪ2 (Myhre et al. -
Cccma CMIP6 Model Updates
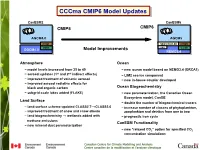
CCCma CMIP6 Model Updates CanESM2! CanESM5! CMIP5 CMIP6 AGCM4.0! AGCM5! CTEM NEW COUPLER CTEM5 CMOC LIM2 CanOE OGCM4.0! Model Improvements NEMO3.4! Atmosphere Ocean − model levels increased from 35 to 49 − new ocean model based on NEMO3.4 (ORCA1) st nd − aerosol updates (1 and 2 indirect effects) − LIM2 sea-ice component − improved treatment of volcanic aerosol − new in-house coupler developed − improved aerosol radiative effects for black and organic carbon Ocean Biogeochemistry − subgrid scale lakes added (FLAKE) − new parameterization, the Canadian Ocean Ecosystem model, CanOE Land Surface − double the number of biogeochemical tracers − land-surface scheme updated CLASS2.7→CLASS3.6 − increase number of classes of phytoplankton, − improved treatment of snow and snow albedo zooplankton and detritus from one to two − land biogeochemistry → wetlands added with − prognostic iron cycle methane emissions CanESM Functionality − new mineral dust parameterization − new “relaxed CO2” option for specified CO2 concentration simulations Other issues: 1. We are currently in the process of migrating to a new supercomputing system – being installed now and should be running on it over the next few months. 2. Global climate model development is integrated with development of operational seasonal prediction system, decadal prediction system, and regional climate downscaling system. 3. We are also increasingly involved in aspects of ‘climate services’ – providing multi-model climate scenario information to impact and adaptation users, decision-makers, -

The Outlook of Ethiopian Long Rain Season from the Global Circulation Model Solomon Addisu Legesse*
Legesse Environ Syst Res (2016) 5:16 DOI 10.1186/s40068-016-0066-1 RESEARCH Open Access The outlook of Ethiopian long rain season from the global circulation model Solomon Addisu Legesse* Abstract Background: The primary reason to study summer monsoon (long rain season) all over Ethiopia was due to the atmospheric circulation displays a spectacular annual cycle of rainfall in which more than 80 % of the annual rain comes during the summer season comprised of the months June–September. Any minor change in rainfall intensity from the normal conditions imposes a severe challenge on the rural people since its main livelihood is agriculture which mostly relies on summer monsoon. This research work, entitled, ‘The outlook of Ethiopian long rain season from the global circulation model’ has been conducted to fill such knowledge gaps of the target population. The objectives of the research were to examine the global circulation model output data and its outlooks over Ethiopian summer. To attain this specific objective, global circulation model output data were used. These data were analyzed by using Xcon, Matlab and grid analysis and display system computer software programs. Results: The results revealed that Ethiopian summer rainfall (long rain season) has been declined by 70.51 mm in the past four decades (1971–2010); while the best performed models having similar trends to the historical observed rainfall data analysis predicted that the future summer mean rainfall amount will decline by about 60.07 mm (model cccma) and 89.45 mm (model bccr). Conclusions: To conclude, the legislative bodies and development planners should design strategies and plans by taking into account impacts of declining summer rainfall on rural livelihoods. -

Review of the Global Models Used Within Phase 1 of the Chemistry–Climate Model Initiative (CCMI)
Geosci. Model Dev., 10, 639–671, 2017 www.geosci-model-dev.net/10/639/2017/ doi:10.5194/gmd-10-639-2017 © Author(s) 2017. CC Attribution 3.0 License. Review of the global models used within phase 1 of the Chemistry–Climate Model Initiative (CCMI) Olaf Morgenstern1, Michaela I. Hegglin2, Eugene Rozanov18,5, Fiona M. O’Connor14, N. Luke Abraham17,20, Hideharu Akiyoshi8, Alexander T. Archibald17,20, Slimane Bekki21, Neal Butchart14, Martyn P. Chipperfield16, Makoto Deushi15, Sandip S. Dhomse16, Rolando R. Garcia7, Steven C. Hardiman14, Larry W. Horowitz13, Patrick Jöckel10, Beatrice Josse9, Douglas Kinnison7, Meiyun Lin13,23, Eva Mancini3, Michael E. Manyin12,22, Marion Marchand21, Virginie Marécal9, Martine Michou9, Luke D. Oman12, Giovanni Pitari3, David A. Plummer4, Laura E. Revell5,6, David Saint-Martin9, Robyn Schofield11, Andrea Stenke5, Kane Stone11,a, Kengo Sudo19, Taichu Y. Tanaka15, Simone Tilmes7, Yousuke Yamashita8,b, Kohei Yoshida15, and Guang Zeng1 1National Institute of Water and Atmospheric Research (NIWA), Wellington, New Zealand 2Department of Meteorology, University of Reading, Reading, UK 3Department of Physical and Chemical Sciences, Universitá dell’Aquila, L’Aquila, Italy 4Environment and Climate Change Canada, Montréal, Canada 5Institute for Atmospheric and Climate Science, ETH Zürich (ETHZ), Zürich, Switzerland 6Bodeker Scientific, Christchurch, New Zealand 7National Center for Atmospheric Research (NCAR), Boulder, Colorado, USA 8National Institute of Environmental Studies (NIES), Tsukuba, Japan 9CNRM UMR 3589, Météo-France/CNRS, -
PCMDI's* Role in Enabling Climate Science Through Coordinated
PCMDI’s* Role in Enabling Climate Science Through Coordinated Modeling Activities Karl E. Taylor *Program for Climate Model Diagnosis and Intercomparison (PCMDI) Lawrence Livermore National Laboratory Briefing of BERAC Washington D.C. 16 October 2012 PCMDI’s dual mission is unique and appropriate for a national lab • Advance climate science through individual and team research contributions. Perform cutting-edge research to understand the climate system and reduce uncertainty in climate model projections. • Provide leadership and infrastructure for coordinated modeling activities that promote and facilitate research by others. Plan and manage “model intercomparison projects” and provide access to multi-model output. PCMDI’s work is funded by the Climate and Environmental Sciences Division of BER. BERAC 16 October 2012 K. E. Taylor Outline: PCMDI’s role in coordinated modeling activities • Overview of the Coupled Model Intercomparison Project (CMIP) What is CMIP? Historical perspective International context • PCMDI’s role in CMIP • CMIP’s scientific impact Publications Multi-model perspective • Samples of CMIP research results (PCMDI & LLNL) • CMIP’s future BERAC 16 October 2012 K. E. Taylor What is the “Coupled Model Intercomparison Project” (CMIP)? Highlights of “model intercomparison” history • ca. 1970s and 1980s: climate model evaluation was largely a qualitative endeavor done by modeling groups • ca. 1991: Atmospheric Model Intercomparison Project (AMIP) Roughly 30 modeling groups from 10 different countries Engaged outside researchers in the evaluation and diagnosis of atmospheric models • ca. 1995: Coupled Model Intercomparison Project (CMIP) • CMIP3 (2003 – ca. 2013): Expts: control, idealized climate change, historical, and SRES (future scenario) runs Output largely available by 2005 • CMIP5 (2006 – beyond 2016; ongoing and revisited) An ambitious variety of “realistic” and diagnostic experiments Output largely available by 2012 BERAC 16 October 2012 K. -

Uncertainty in Climate Change Projections of Discharge for the Mekong Riverd
Discussion Paper | Discussion Paper | Discussion Paper | Discussion Paper | Hydrol. Earth Syst. Sci. Discuss., 7, 5991–6024, 2010 Hydrology and www.hydrol-earth-syst-sci-discuss.net/7/5991/2010/ Earth System doi:10.5194/hessd-7-5991-2010 Sciences © Author(s) 2010. CC Attribution 3.0 License. Discussions This discussion paper is/has been under review for the journal Hydrology and Earth System Sciences (HESS). Please refer to the corresponding final paper in HESS if available. Uncertainty in climate change projections of discharge for the Mekong River Basin D. G. Kingston1,2, J. R. Thompson1, and G. Kite3 1UCL Department of Geography, University College London, Gower Street, London, WC1E 6BT, UK 2Department of Geography, University of Otago, P.O. Box 56, Dunedin, New Zealand 3Bryn Eithin, Cefn Bychan Road, Pantymwyn, Flintshire, CH7 5EN, UK Received: 6 August 2010 – Accepted: 6 August 2010 – Published: 23 August 2010 Correspondence to: D. G. Kingston ([email protected]) Published by Copernicus Publications on behalf of the European Geosciences Union. 5991 Discussion Paper | Discussion Paper | Discussion Paper | Discussion Paper | Abstract The Mekong River Basin comprises a key regional resource in Southeast Asia for sec- tors that include agriculture, fisheries and electricity production. Here we explore the potential impacts of climate change on freshwater resources within the river basin. We 5 quantify uncertainty in these projections associated with GCM structure and climate sensitivity, as well as from hydrological model parameter specification. This is achieved by running pattern-scaled GCM output through a semi-distributed hydrological model (SLURP) of the basin. These pattern-scaled GCM outputs allow investigation of spe- cific thresholds of global climate change including the postulated 2 ◦C threshold of “dan- 10 gerous” climate change as simulated using outputs from seven different GCMs.