An Agile Aircraft Non-Linear Dynamics by Continuation Methods and Bifurcation Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ff 89/6 Copy
$3 vol libre • free flight 6/89 Dec - Jan POTPOURRI SAC was informed by Sport Canada on the 10th of July that we are not eligible for funding for 1989-90 and until further notice. Thus we are now totally on our own. The average yearly grant from 1979 to 1988 in 1989 dollars was $14,000, or $16 per person. Perhaps it’s a good thing as planning in an atmosphere of doubt is not conducive to good health and efficient use of funds. The cutback was not unexpected and steps were taken early on to ease the effects of this loss of revenue. Imaginative planning in our small store and a good response from our members through the use of the “Soaring Stuff” inserts resulted in in- creased sales. We will also receive higher than projected invest- ment income essentially due to careful cash management and short-term interest rates, which have remained higher for longer than generally expected. In addition, a small gain in projected receipts from an unexpected increase in membership – now at 1423 – which is the first time since 1982 that we have passed 1400. Total expenditures should come in well below budget projection, primarily as a result of scaling back meetings and travel expenditures. On balance it seems fair to say that a combination of some tight fistedness on the expenditure side and a bit of luck on the revenue side will leave SAC in a financially stronger position than was expected at the beginning of the season, despite the cutting off of govern- ment funding. -
Oxygen Systems
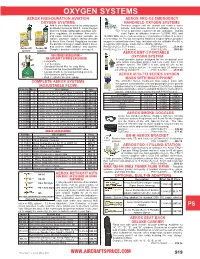
OXYGEN SYSTEMS AEROX HIGH-DURATION AVIATION AEROX PRO-O2 EMERGENCY OXYGEN SYSTEMS HANDHELD OXYGEN SYSTEMS Add to your flying comfort by using oxygen Provides oxygen until the aircraft can reach a lower at altitudes as low as 5000 ft. Aerox Oxygen altitude. And because Pro-O2 is refillable, there is no CM Systems include lightweight aluminum cyl in- need to purchase replacement O2 cartridges. During ders, regulators, all hardware, flow meter, short flights at altitudes between 12,500ft. MSL and and nasal cannulas (masks available as 14,000ft. MSL where maneuvering over mountains or turbulent weather option). Oxysaver oxygen saving cannulas is necessary, the Pro-O2 emergency handheld oxygen system provides & Aerox Flow Control Regulators increase oxygen to extend these brief legs. Included with the refillable Pro-O2 is WP the duration of oxygen supply about 4 times, a regulator with gauge, mask and a refillable cylinder. and prevent nasal irritation and dryness. Pro-O2-2 (2 Cu. Ft./1 mask)........................P/N 13-02735 .........$328.00 Aerox 2D Aerox 4M Complete brochure available on request. Pro-O2-4 (2 Cu. Ft./2 masks) ......................P/N 13-02736 .........$360.00 system system AEROX EMT-3 PORTABLE 500 SERIES REGULATOR – AN AIRCRAFT SPRUCE EXCLUSIVE! OXYGEN SYSTEM ME A small portable system designed for the occasional user • Low profile who wants something smaller and less costly than a full • 1, 2, & 4 place portable system. The EMT-3 is also ideal for use as an • Standard Aircraft filler for easy filling emergency oxygen system. The system lasts 25 minutes at • Convenient top mounted ON/OFF valve 2.5 LPM @ 25,000 FT. -

Model Builder February 1982
S >580„0Ζ8>Λ volume 12, number 121 ■Sw L to R: Tony Bonetti-National Champion, Steve Helms and Donald Weitz, Jr. THE FINISHING TOUCH Tony, Steve, and Don didn't take 1st, 2nd, and 5th places at the 1981 Nationals by accident. Precision aerobatics demand the å most reliable and highest performance equipment * available for the best possible finish. The same off-the-shelf high quality components they used are J ( 1 available from your local Circus Hobbies dealerJ Whether you fly for sport or competition, these products are designed to help you become the best I pilot you could be. So, if you are serious about ^ your flying insist on JR Radios, Webra Engines wSSSSSi and IM Accessories, the Finishing Touch for every winner^ JR, Webra, and IM are imported exclusively by Circus Hobbies Send $1.00 for complete product catalog. New address: Circus Hobbies Incorporated, 3132 S. Highland Dr., Subsidiary of Circus Circus Hotels Las Vegas, Nevada 89109 0 1980 ASSOCIATED ELECTRICS Speclol soft racing compound front fires. (mounted/#3654-S) I (it fiberglass Aircraft alloy, 8-32 tlatheai screws. Vi" (#3324) and V /i" (#3325) avoiloble. Weightsaver fiberglass chassis. Precision die-cut, drilled and countersunk. (#3312) It takes a close look at a Factory car to see all of the tricks the Team has developed. Some, like precision ball bearings, (#3655/front and # 2 2 2 2 /re a r) you can't see at all. But what a difference it makes. Special, light weight fiberglass chassis plates. Featherweight alloy Associated captures the sleek flathead chassis screws. -

Unusual Attitudes and the Aerodynamics of Maneuvering Flight Author’S Note to Flightlab Students
Unusual Attitudes and the Aerodynamics of Maneuvering Flight Author’s Note to Flightlab Students The collection of documents assembled here, under the general title “Unusual Attitudes and the Aerodynamics of Maneuvering Flight,” covers a lot of ground. That’s because unusual-attitude training is the perfect occasion for aerodynamics training, and in turn depends on aerodynamics training for success. I don’t expect a pilot new to the subject to absorb everything here in one gulp. That’s not necessary; in fact, it would be beyond the call of duty for most—aspiring test pilots aside. But do give the contents a quick initial pass, if only to get the measure of what’s available and how it’s organized. Your flights will be more productive if you know where to go in the texts for additional background. Before we fly together, I suggest that you read the section called “Axes and Derivatives.” This will introduce you to the concept of the velocity vector and to the basic aircraft response modes. If you pick up a head of steam, go on to read “Two-Dimensional Aerodynamics.” This is mostly about how pressure patterns form over the surface of a wing during the generation of lift, and begins to suggest how changes in those patterns, visible to us through our wing tufts, affect control. If you catch any typos, or statements that you think are either unclear or simply preposterous, please let me know. Thanks. Bill Crawford ii Bill Crawford: WWW.FLIGHTLAB.NET Unusual Attitudes and the Aerodynamics of Maneuvering Flight © Flight Emergency & Advanced Maneuvers Training, Inc. -

FAA-H-8083-3A, Airplane Flying Handbook -- 3 of 7 Files
Ch 04.qxd 5/7/04 6:46 AM Page 4-1 NTRODUCTION Maneuvering during slow flight should be performed I using both instrument indications and outside visual The maintenance of lift and control of an airplane in reference. Slow flight should be practiced from straight flight requires a certain minimum airspeed. This glides, straight-and-level flight, and from medium critical airspeed depends on certain factors, such as banked gliding and level flight turns. Slow flight at gross weight, load factors, and existing density altitude. approach speeds should include slowing the airplane The minimum speed below which further controlled smoothly and promptly from cruising to approach flight is impossible is called the stalling speed. An speeds without changes in altitude or heading, and important feature of pilot training is the development determining and using appropriate power and trim of the ability to estimate the margin of safety above the settings. Slow flight at approach speed should also stalling speed. Also, the ability to determine the include configuration changes, such as landing gear characteristic responses of any airplane at different and flaps, while maintaining heading and altitude. airspeeds is of great importance to the pilot. The student pilot, therefore, must develop this awareness in FLIGHT AT MINIMUM CONTROLLABLE order to safely avoid stalls and to operate an airplane AIRSPEED This maneuver demonstrates the flight characteristics correctly and safely at slow airspeeds. and degree of controllability of the airplane at its minimum flying speed. By definition, the term “flight SLOW FLIGHT at minimum controllable airspeed” means a speed at Slow flight could be thought of, by some, as a speed which any further increase in angle of attack or load that is less than cruise. -
The History of V.A.R.M.S
THE HISTORY OF V.A.R.M.S. ORIGINS & GENERAL INFORMATION Rev. July 2017 TABLE OF CONTENTS (To quickly access a topic, hold CTRL and click on desired item) TABLE OF CONTENTS ...................................................................................................... 2 FOREWORD ....................................................................................................................... 4 AN EARLY & SHORT HISTORY OF VARMS .................................................................... 6 THE POSTER ..................................................................................................................... 7 ATOP A HILL AN ASSOCIATION IS FORMED ................................................................. 9 INAUGURAL MEMBERS & ANNUAL MEMBERSHIP NUMBERS ........................ 10 PROFILE - PETER PRUSSNER ....................................................................................... 11 (President - Inaugural Committee - VARMS No 1) ................................................ 11 PROFILE - ALAN VILLIERS ............................................................................................. 18 (Secretary - Inaugural Committee - VARMS No 2) ................................................ 18 PROFILE - RAY DATODI - DIP. E.E, G.I.E., M.I.I.C.A. .................................................... 19 (Treasurer - Inaugural Committee - VARMS No 3) ............................................... 19 GMAA (GAGS) THE EARLY DAYS ................................................................................ -

Skyline Soaring Club Aerobatics Guide
Skyline Soaring Club Aerobatics Guide Revision 2.0 November 2013 1 Revision History Date Revision Comment Jan 2003 1.0 Initial Version (DW) Reformatted to Microsoft Word, added revision to aerobatic procedures, Nov 2013 2.0 relocated unusual attitude recovery procedures, repaginated and deleted (CW) Hammerhead from syllabus. 2 Contents Chapter 1 – Aerobatic Training ..................................................................................................................................... 4 1.1 Introduction ........................................................................................................................................................ 4 1.2. Sailplane Aerobatics ......................................................................................................................................... 4 1.3. Approved Maneuvers ........................................................................................................................................ 4 1.4 Prohibited Maneuvers ........................................................................................................................................ 4 Chapter 2 – Aerobatic Procedures ................................................................................................................................. 5 2.1. Preflight Procedures ..................................................................................................................................... 5 Chapter 3 – Unusual Attitude Recoveries ..................................................................................................................... -
Teacher's Guide
TEACHER’S GUIDE For AEROSPACE: THE JOURNEY OF FLIGHT This document was prepared by Civil Air Patrol. Contents Preface iv National Standards 1 Part One: The Rich History of Air Power Chapter 1 – Introduction to Air Power 10 Chapter 2 – The Adolescence of Air Power: 1904-1919 15 Chapter 3 – The Golden Age: 1919-1939 21 Chapter 4 – Air Power Goes to War 27 Chapter 5 – Aviation: From the Cold War to Desert Storm 35 Chapter 6 – Advances in Aeronautics 45 Part Two: Principles of Flight and Navigation Chapter 7 – Basic Aeronautics and Aerodynamics 48 Chapter 8 – Aircraft in Motion 52 Chapter 9 – Flight Navigation 58 Part Three: The Aerospace Community Chapter 10 – The Airport 63 Chapter 11 – Air Carriers 65 Chapter 12 – General Aviation 68 Chapter 13 – Business and Commercial Aviation 71 Chapter 14 – Military Aircraft 75 Chapter 15 – Helicopters, STOL, VTOL and UAVs 79 Chapter 16 – Aerospace Organizations 83 Chapter 17 – Aerospace Careers and Training 87 Part Four: Air Environment Chapter 18 – The Atmosphere 91 Chapter 19 – Weather Elements 97 Chapter 20 – Aviation Weather 101 Part Five: Rockets Chapter 21 – Rocket Fundamentals 105 Chapter 22 – Chemical Propulsion 109 Chapter 23 – Orbits and Trajectories 112 Part Six: Space Chapter 24 – Space Environment 117 Chapter 25 – Our Solar System 122 Chapter 26 – Unmanned Space Exploration 128 Chapter 27 – Manned Spacecraft 134 ii Multiple Choice Sample Test Bank Part One: The Rich History of Air Power Chapter 1 – Introduction to Air Power 13 Chapter 2 – The Adolescence of Air Power: 1904-1919 18 Chapter -

Aerobatics Guide SKYLINE SOARING CLUB
Aerobatics Guide SKYLINE SO A R I N G CLUB Front Royal Virginia January 2003 (Version 1.0) ii Skyline Soaring Club Aerobatics Guide This Guide outlines the training required to fly and instruct aerobatic maneuvers in the Skyline Soaring Club. It prescribes the overall plan of instruction, specific instructions for each maneuver, and basic/advanced aerobatic training programs. Table of Contents TABLE OF CONTENTS...................................................................................................................I 1. AEROBATIC TRAINING..........................................................................................................1 1.1. Introduction................................................................................................................................................................1 1.2. Sailplane Aerobatics..................................................................................................................................................1 1.3. Approved Maneuvers................................................................................................................................................1 1.4 Prohibited Maneuvers.................................................................................................................................................1 2. UNUSUAL ATTITUDE RECOVERIES....................................................................................2 2.1. Nose-Low Recoveries................................................................................................................................................2 -
Chapter 2: Aerodynamics of Flight
Chapter 2 Aerodynamics of Flight Introduction This chapter presents aerodynamic fundamentals and principles as they apply to helicopters. The content relates to flight operations and performance of normal flight tasks. It covers theory and application of aerodynamics for the pilot, whether in flight training or general flight operations. 2-1 Gravity acting on the mass (the amount of matter) of an object is increased the static pressure will decrease. Due to the creates a force called weight. The rotor blade below weighs design of the airfoil, the velocity of the air passing over the 100 lbs. It is 20 feet long (span) and is 1 foot wide (chord). upper surface will be greater than that of the lower surface, Accordingly, its surface area is 20 square feet. [Figure 2-1] leading to higher dynamic pressure on the upper surface than on the lower surface. The higher dynamic pressure on the The blade is perfectly balanced on a pinpoint stand, as you upper surface lowers the static pressure on the upper surface. can see in Figure 2-2 from looking at it from the end (the The static pressure on the bottom will now be greater than airfoil view). The goal is for the blade to defy gravity and the static pressure on the top. The blade will experience an stay exactly where it is when we remove the stand. If we do upward force. With just the right amount of air passing over nothing before removing the stand, the blade will simply fall the blade the upward force will equal one pound per square to the ground. -

Maneuvers and Flight Notes Copyright Flight Emergency & Advanced Maneuvers Training, Inc
Maneuvers and Flight Notes Copyright Flight Emergency & Advanced Maneuvers Training, Inc. dba Flightlab, 2009. All rights reserved. For Training Purposes Only General Briefing Anxiety!!! feelings of discomfort. Becoming sick does not help you adapt faster. If you’ve never flown aerobatics (or have had some bad experiences in the past), anxiety is Don’t fly aerobatics on an empty stomach. Eat! natural. Sometimes people are anxious about You look thin! Drink plenty of water, especially safety, sometimes about how well they’ll when the outside temperature is high. respond when the instructor places the aircraft in Dehydration reduces g tolerance. an upset condition. Anxiety disappears as you learn to control the aircraft. We won’t take you Research done with persons subject to motion by surprise (well, not immediately). We’ll teach sickness suggests what you’ve perhaps already you how to follow events so that surprises observed: People who report that they’ve become manageable. recovered from feelings of nausea can remain highly sensitized to vestibular disturbance for Even so, there may be times when you feel that hours afterwards. That’s why those airsick too much is happening too fast. That’s not passengers who announce with relief that they’re entirely bad: it shows that you’re pushing the now feeling much better often spontaneously re- boundaries of your previous training. As you erupt as you start to maneuver into the traffic gain practice you’ll find that the aircraft’s pattern. The temporary disappearance of motions become easier to follow and tracking the symptoms doesn’t necessarily mean the battle is horizon becomes less difficult. -

Universit`A Degli Studi Di Padova Preliminary
Universita` degli Studi di Padova Dipartimento di Ingegneria Industriale Corso di Laurea in Ingegneria Aerospaziale Preliminary Dimensioning and Design of an Ultralight Acrobatic Motor-Glider Powered by a Self-Sufficient Electric Solution Dimensionamento e Design Preliminare di un Moto-Aliante Acrobatico Propulso Mediante una Soluzione Elettrica Autosufficiente Relatore: Ch.mo Prof. Ugo Laureando: Galvanetto Marco Marzari Corelatore: Ch.mo Prof. Francesco Picano Academic Year 2017/2018 Contents 1 Introduction 1 1.1 Why Researching on Electric Propulsion Aircraft . .2 1.2 Motivation and Objectives . .3 1.2.1 Phases of an Aeronautical Project . .5 1.3 The Electric Powered Flight . .6 1.4 Brief Summarize on Solar Powered Aircraft Prototypes . .7 1.4.1 First Conceptual and Experimental Prototypes . .7 1.4.2 The Beginning of Solar Aviation . .9 1.4.3 From Model-Scale Aircaft to H.A.L.E. .9 1.4.4 State of the Art in Conceptual Methodology Design . 16 1.5 Structure of this Work . 17 2 General and Fundamental Concepts 19 2.1 Basic Sailplane Aerodynamics Laws . 20 2.1.1 Introduction . 20 2.1.2 Airfoil and Wing Aerodynamic Theory . 22 2.1.3 Typical Sailplane Wing Geometry . 28 2.2 Aeronautic Structures: First Aspect Considerations . 30 2.3 The Innovative Purpose: The Electric Propulsion Solution . 32 2.3.1 Photovoltaic Cell: Working Principle and Typology . 33 2.3.2 Power Accumulator: Electrochemical Batteries . 37 2.3.3 Electric Engine: New Motion Way . 37 2.3.4 AC Motor Equations . 40 3 Aerodynamic and Structural Conceptual Design 43 3.1 Design : Requirements and Approach .