Development of Plug-In Air Powered Four Wheels Motorcycle Drivetrain Control Unit
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
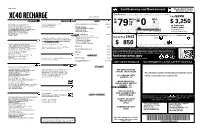
XC40 RECHARGE Mpge MPG Gallons PERFORMANCE AUTHORIZED RETAILER PRICING Per 100
2021Volvo Fuel Economy and Environment Plug-In Hybrid Vehicle Electricity-Gasoline Fuel Economy Small SUV range from 16 to 120 MPGe. The best vehicle rates 120 MPGe. Volvo Car USA LLC Electricity + Gasoline Gasoline Only You save www.volvocars.com/us Charge Time: 8hours ( 240 V) XC40 RECHARGE MPGe MPG gallons PERFORMANCE AUTHORIZED RETAILER PRICING per 100 ...................................................................................................... ...................................................................................................... .................................................................................................................... 1.0 miles .0 kW-hrs $ 3,250 Pure Electric, Zero Tailpipe Emission VOLVO CARS BELLEVUE 5702 IMPORTER'S SUGGESTED LIST PRICE P.O.E.: $ 53,990.00 gallons per per 100 85 72 Front and Rear Electric Motors 420 116TH AVENUE NE 43 miles 100 miles in fuel costs combined city/highway 0combined city/highway 78 kWh Lithium Ion High Voltage Battery BELLEVUE, WA 98004 Climate Package 750.00 79 over 5 years Shift-by-Wire Single Speed Transmission Heated Windshield Wiper Blades Driving Range Anti-Lock Braking Sys (ABS) w/ Hill Start Assist compared to the 402 Horsepower and 486 lb-ft torque Heated Rear Seats Electricity + Gasoline Gasoline Only Electric Power Assisted Steering Heated Steering Wheel 0 0 0 0 0 average new vehicle. All-Wheel-Drive with Instant Traction All Electric range = 0 to 8 miles 0 miles Dynamic Chassis Advanced Package 1,300.00 19" Alloy Wheels Headlight High Pressure Cleaning Fuel Economy & Greenhouse Gas Rating (tailpipe only) Smog Rating (tailpipe only) ......................................................................................................WARRANTY Pilot Assist Driver Assistance System with Annual Fuel 48 Month/50,000 Mile Limited Warranty Coverage cost MPG Adaptive Cruise Control 144 Month Corrosion Protection "Unlimited Mileage" 360 Surround View Camera Refer to Warranty Info Book for Specific Limitations. -

948TE Introduction Webinar Handout
ZF9HP48 / 948TE Introduction Presented by: Mike Souza ATRA Senior Research Technician 948TE Intro Webinar ©2015 ATRA. All Rights Reserved. Vehicle Application Acura (ZF9HP48) Land Rover MDX 2014-15 AWD V6 3.5L Range Rover Evoque 2013-15 FWD/4X4 L4 2.0/2.2L RLX 2014-15 FWD V6 3.5L/3.7L Discovery (LR4) 2015 FWD/AWD L4 2.0 Chrysler (948TE) TL 2014-15 AWD V6 3.5L/3.7L 200 2014-15 FWD L4 2.4L V6 3.2L Town & Country 2013-15 FWD 2013-14 L4 2.4L V6 3.6L Dodge (948TE) Caravan 2014-15 FWD V6 3.6L Fiat (EP2) 500X 2014-15 FWD L4 2.4L Doblo 2015 FWD L4 2.4L Jeep (948TE) Cherokee (KL) 2013-15 FWD L4 2.4L V6 3.2L Renegade 2014-15 FWD L4 2.4L Honda (ZF9HP48) Civic 2014-15 FWD L4 1.6L CRV 2014-15 FWD L4 1.6L Transmission Identification Chrysler 948TE (Kokomo IN) ZF 9HP48 (Germany) • Externally the two units are visually similar • Parts cannot be interchanged. • VIN should always be used as the key for parts lookup. • Barcode label includes the manufacturer identification in the second and third characters of the traceability number. 9 Nine forward gear speeds 48 480 Nm torque capacity 354 lbs ft T Transverse mounted E Electronic control HP Hydraulic planetary Introduction ZF developed the first nine-speed automatic transmission for front wheel drive vehicles. Although it was built in June 2011 it did not make it’s debut until mid 2013. This new transmission delivers extremely short shifting times and exceptionally smooth shifts. -

2014 CTX700N/NA/ND Owner's Manual
14 CTX700N-31MJF6000.book 4 ページ 2013年1月30日 水曜日 午後3時1分 Contents Motorcycle Safety P. 2 Operation Guide P. 16 Maintenance P. 47 Troubleshooting P. 99 Information P. 120 Specifications P. 141 Index P. 145 Welcome Congratulations on your purchase of a new When service is required, remember that Honda motorcycle. Your selection of a your Honda dealer knows your motorcycle Honda makes you part of a worldwide family best. If you have the required mechanical of satisfied customers who appreciate “know-how” and tools, you can purchase an Honda’s reputation for building quality into official Honda Service Manual to help you every product. perform many maintenance and repair tasks. 2 P. 136 To ensure your safety and riding pleasure: Read the warranty information thoroughly so ● Read this owner’s manual carefully. that you understand the warranty coverage ● Follow all recommendations and and that you are aware of your rights and procedures contained in this manual. responsibilities. 2 P. 137 ● Pay close attention to safety messages contained in this manual and on the You may also want to visit our website at motorcycle. www.powersports.honda.com. Canada www.honda.ca. To protect your investment, we urge you to Happy riding! take responsibility for keeping your California Proposition 65 Warning motorcycle well serviced and maintained. WARNING: This product contains or emits Also, observe the break-in guidelines, and chemicals known to the State of California to always perform the pre-ride inspection and cause cancer and birth defects or other other periodic checks in this manual. reproductive harm. A Few Words About Safety Your safety, and the safety of others, is very important. -

Design of Automotive X-By-Wire Systems Cédric Wilwert, Nicolas Navet, Ye-Qiong Song, Françoise Simonot-Lion
Design of automotive X-by-Wire systems Cédric Wilwert, Nicolas Navet, Ye-Qiong Song, Françoise Simonot-Lion To cite this version: Cédric Wilwert, Nicolas Navet, Ye-Qiong Song, Françoise Simonot-Lion. Design of automotive X-by- Wire systems. Richard Zurawski. The Industrial Communication Technology Handbook, CRC Press, 2005, 0849330777. inria-00000562 HAL Id: inria-00000562 https://hal.inria.fr/inria-00000562 Submitted on 27 Aug 2007 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Design of automotive X-by-Wire systems Cédric Wilwert PSA Peugeot - Citroën 92000 La Garenne Colombe - France Fax: +33 3 83 58 17 01 Phone: +33 3 83 58 17 17 [email protected] Nicolas Navet LORIA UMR 7503 – INRIA Campus Scientifique - BP 239 - 54506 VANDOEUVRE-lès-NANCY CEDEX Fax: +33 3 83 58 17 01 Phone : +33 3 83 58 17 61 [email protected] Ye Qiong Song LORIA UMR 7503 – Université Henri Poincaré Nancy I Campus Scientifique - BP 239 - 54506 VANDOEUVRE-lès-NANCY CEDEX Fax: +33 3 83 58 17 01 Phone : +33 3 83 58 17 64 [email protected] Françoise Simonot-Lion LORIA UMR 7503 – Institut National Polytechnique de Lorraine Campus Scientifique - BP 239 - 54506 VANDOEUVRE-lès-NANCY CEDEX Fax: +33 3 83 27 83 19 Phone : +33 3 83 58 17 62 [email protected] CONTENTS Design of automotive X-by-Wire systems ...................................................................................................... -

Kia-K900-2016-CA.Pdf
2016 K900 A NEW CONCEPT OF LUXURY. Why follow a well-worn path when you can follow a path of your own? That mode of thinking applies to the way you select a truly ground-breaking luxury automobile. It also describes how Kia Premium pursued its reinvention of luxury driving – a pursuit that reaches its ultimate expression in the newly redesigned 2016 Kia K900. It’s the rear-drive performance luxury sedan that embodies a fresh and unpretentious approach that’s sure to heighten your enthusiasm. Highlights include everything from the supremely confident performance of the available 420-horsepower9 5.0L Gasoline Direct Injection (GDI) V8 engine to such top-tier amenities as the concert-hall sound quality of the premium Lexicon Discrete Logic 7® 4 surround-sound audio system. The exquisite craftsmanship of the available glove-soft Nappa leather trim and available genuine wood trim accents rounds out the experience with exceptional refinement. In the 2016 K900. INTERNATIONAL MODEL SHOWN. Some features may vary. IT LEADS BY EXAMPLE. When you’re entering uncharted territory, you need to have a singular sense of direction. Kia knew exactly how it wanted to transform performance luxury driving to deliver on “The Power to Surprise”. The results are on vivid display in the K900, beginning with its evocative design. The superbly balanced, extended wheelbase rear-drive platform provides a solid foundation for the scintillating performance of the 311-horsepower 3.8L GDI V6 engine or the available 420-horsepower9 5.0L GDI V8. The robust power is complemented by the K900’s precision shifting eight-speed automatic transmission with its available shift-by-wire gear selector. -
Gearbox Evolution (Also See Part VII: Neutral Indicating Switch Evolution)
Ural (Урал) - Dnepr (Днепр) Russian Motorcycle Part XXXII: Gearbox Evolution (Also See Part VII: Neutral Indicating Switch Evolution) Ernie Franke [email protected] 4 / 2020 Russian Ural (Урал) - Dnepr (Днепр) Motorcycle Gearbox Review • Part XXXII: Gearbox Evolution • Part XXXII-1: How the Gearbox Works (Expanded step-by-step work of Bill Glaser) • Part XXXII-2A: BMW (Bayerische Motoren Werke) R71 Gearbox (Father of Russian M-72) • Part XXXII-2B: ZiS (Zavod imeni Stalina) and 7204 Gearbox (Initial and later M-72) • Part XXXII-2C: K-750 (K-750, K-750B and K-750M) Gearbox • Part XXXII-2D: M-72 M and M-72N Gearbox (Ural and Dnepr Production) • Part XXXII-3: 6204 Gearbox (M-62 thru M-67) • Part XXXII-4: 7500 Gearbox (Updated 6204 gearboxes for K-750B / K-750M / MB-750 / MB-750M) • Part XXXII-5: MT804 Gearbox (Dnepr MT-9 thru MT-11/16) • Part XXXII-6: Ural M-67.36 and 650 (IMZ-8.103) Gearbox • Part XXXII-7: Ural 750 Gearbox (Current Ural models) • Part XXXII-8: Optional Gear Ratios (Higher 1st gear, lower 3rd and 4th gear, 5th gear overdrive) • Part XXXII-9: Shifting Gears (Shifting and Adjusting Gearbox) The Russian sidecar motorcycle gearbox is examined over the last seventy years.2 Outline for Dnepr / Ural Gearbox Evolution • History of Dnepr / Ural Gearboxes Divided into Four Main Groups: o BMW R71 / M-72 ZiS / Dnepr / Ural • Five Distinctive Types of Gearboxes: o BMW R71 / M-72 ZiS and M-72 7204 gearboxes: Two gear-change levers - manual (right) and foot (left). o 6204: 4-speed with gear-shifting by movable couplings with internal teeth Cam clutches on secondary (output) shaft replaced with splined one. -

Owner's Manual
This manual should be considered a permanent part of the motorcycle and should remain with the motorcycle when it is resold. This publication includes the latest production information available before printing. Honda Motor Co., Ltd. reserves the right to make changes at any time without notice and without incurring any obligation. No part of this publication may be reproduced without written permission. The vehicle pictured in this owner’s manual may not match your actual vehicle. © 2015 Honda Motor Co., Ltd. Welcome Congratulations on your purchase of a new ● The following codes in this manual indicate Honda motorcycle. Your selection of a Honda the country. makes you part of a worldwide family of ● The illustrations here in are based on the satisfied customers who appreciate Honda’s CB125 II KE type. reputation for building quality into every Country Codes product. Code Country CB125 To ensure your safety and riding pleasure: KE, II KE, III KE Kenya ● Read this owner’s manual carefully. ● Follow all recommendations and procedures contained in this manual. ● Pay close attention to safety messages contained in this manual and on the motorcycle. A Few Words About Safety Your safety, and the safety of others, is very important. Operating this motorcycle safely is 3DANGER an important responsibility. You WILL be KILLED or SERIOUSLY To help you make informed decisions about HURT if you don’t follow instructions. safety, we have provided operating procedures and other information on safety labels and in 3WARNING this manual. This information alerts you to You CAN be KILLED or SERIOUSLY potential hazards that could hurt you or others. -

2021 RDX Competitive Comparison
2021 RDX Competitive Comparison 2020 Standard (S), Optional (O), Not Available (–) 2021 2021 Audi 2021 2020 2021 2021 Mercedes-Benz Acura RDX Q5 45 TFSI quattro BMW X3 30i Buick Envision Cadillac XT5 Lexus NX 300 GLC SUV ENGINE/MOTOR DOHC 4-cylinder DOHC turbocharged DOHC turbocharged DOHC turbocharged (FWD/AWD); DOHC turbocharged DOHC turbocharged DOHC turbocharged Engine type 4-cylinder 4-cylinder 4-cylinder DOHC turbocharged 4-cylinder 4-cylinder 4-cylinder 4-cylinder (AWD) Engine displacement 2.0 (turbocharged) (liters) 2.0 2.0 2.0 2.5 2.0 2.0 2.0 Power (hp @ rpm) 197 @ 6300 (2.5); (SAE net) 272 @ 6500 261 @ 5000–6000 248 @ 5200–6500 252 @ 5500 (2.0) 235 @ 5000 235 @ 4800–5600 255 @ 5800–6100 273 @ 258 @ 192 @ 4400 (2.5); Torque (lb-ft @ rpm) 280 @ 1600-4500 1600–4500 1450–4800 295 @ 3000 (2.0) 258 @ 1500–4000 258 @ 1650–4000 273 @ 1800–4000 S Direct fuel injection S S S S S (Plus port injection) S S S S S S S S Variable valve timing (VTEC®) Idle stop S S S S S – S DRIVETRAIN S S S S S S 2-wheel drive (Front-wheel) – (Rear-wheel) (Front-wheel) (Front-wheel) (Front-wheel) (Rear-wheel) O S O O O O All-wheel drive (Super Handling All-Wheel ® (Active Twin-Clutch Rear (Active Twin-Clutch Rear O ® Drive™ [SH-AWD®]) (quattro ) (xDrive) Differential) Differential) (4MATIC ) O O O Torque-vectoring (Super Handling All- – – (Active Twin-Clutch Rear (Active Twin-Clutch Rear – – all-wheel drive Wheel Drive™) Differential) Differential) S S S S (6-speed); S S S Automatic transmission (10-speed) (7-speed DCT) (8-speed) O (9-speed) (9-speed) (6-speed) -
Andrewsproducts.Com • P: 847-759-0190 • F: 847-759-0848 Table of Contents
Making Motorcycles Perform Better Since 1972! PRODUCTS, INC. PERFORMANCE CAMS AND GEARS 431 Kingston Ct. • Mt. Prospect, IL • 60056 • AndrewsProducts.com • P: 847-759-0190 • F: 847-759-0848 Table of Contents COMPANY HISTORY ............................................................................3 TRANSMISSION GEARS: EV 80 (5-SPEED) 5-speed Gears ....................................................................................... 23 CAMSHAFTS: MILWAUKEE 8 Milwaukee 8 Engine Camshafts ................................................................4 5-speed Transmission Shafts ................................................................... 23 Milwaukee 8 Dynomometer Horsepower-Torque ........................................4 5-speed (Complete Gear Sets) ................................................................ 23 TWIN CAMS AND KITS BELT PULLEY RATIOS AND APPLICATIONS All 2007–’12: Twins and 2006 Dyna: Roller Chain Camshafts .............5 Miles Per Hour Chart.............................................................................. 24 1999–’06: Twin Cam Chain Drive Camshafts .....................................6 1999–’06: Roller Chain Conversion Camshafts ...................................7 TWIN CAM AND EV 80 BELT PULLEYS 1999–Later: Twin Cam Gear Drive Camshafts.....................................8 Belt Drive Sprockets (29, 30, 31, 32, 33, and 34 Teeth) ........................... 25 Twin Cam Valve Springs, Collars, Pushrods, and Sprockets...................9 Belt Drive Sprocket (Belt Ratios) .............................................................. -

Steer-By-Wire Architecture: Case of Study
Design of automotive X-by-Wire systems Cédric Wilwert PSA Peugeot - Citroën 92000 La Garenne Colombe - France Fax: +33 3 83 58 17 01 Phone: +33 3 83 58 17 17 [email protected] Nicolas Navet LORIA UMR 7503 – INRIA Campus Scientifique - BP 239 - 54506 VANDOEUVRE-lès-NANCY CEDEX Fax: +33 3 83 58 17 01 Phone : +33 3 83 58 17 61 [email protected] Ye Qiong Song LORIA UMR 7503 – Université Henri Poincaré Nancy I Campus Scientifique - BP 239 - 54506 VANDOEUVRE-lès-NANCY CEDEX Fax: +33 3 83 58 17 01 Phone : +33 3 83 58 17 64 [email protected] Françoise Simonot-Lion LORIA UMR 7503 – Institut National Polytechnique de Lorraine Campus Scientifique - BP 239 - 54506 VANDOEUVRE-lès-NANCY CEDEX Fax: +33 3 83 27 83 19 Phone : +33 3 83 58 17 62 [email protected] CONTENTS Design of automotive X-by-Wire systems ....................................................................................................... 1 Abstract : ............................................................................................................................................................... 2 1 Why X-by-Wire systems ?.......................................................................................................................... 3 1.1 Steer-by-Wire system .......................................................................................................................... 4 1.2 Brake-by-Wire systems ....................................................................................................................... 4 2 Problem, context and constraints -

GENESIS GV70 Quick Reference Guide I 02 FEATURES and CONTROLS
☐ DEMONSTRATE AUTOMATIC CLIMATE CONTROL - page 17 MAINTENANCE VOICE RECOGNITION TIPS ☐ DEMONSTRATE HOW TO OPERATE WINDSHIELD WIPER AND Scheduled Maintenance (Normal Usage) 2.5T 3.5T BLUETOOTH® WASHER – page 12 Engine Oil And Filter Replace 8,000 or 12 mos. Replace 8,000 or 12 mos. Command Example Fuel Additives Add 7,500 or 12 mos. Add 6,000 or 12 mos. Dial <Phone #> “Dial ☐ HOW TO DEFROST 7-1-4-0-0-0-8-8-8-8” Tire Rotation Perform 7,500 or 12 mos. Perform 6,000 or 12 mos. 1 Call <Name> “Call John Smith” Press the front defrost button. Vacuum Hose Improving how you store your contacts can optimize your 2 Air Conditioning Refrigerant Bluetooth® Voice Recognition performance: Set to warmest temperature setting. • Use full names instead of short or single-syllable names 3 Brake Hoses & Lines (“John or Dad”) Set to highest fan speed. • Avoid using special characters/emojis or abbreviations Drive Shafts & Boots (“Dr.”) when saving contacts ☐ TIRE PRESSURE MONITORING SYSTEM (TPMS)- page 42 Exhaust Pipe & Muffler NAVIGATION Front Brake Disc/Pads, Calipers Inspect 7,500 or 12 mos. Inspect 6,000 or 12 mos. Command Example Low tire pressure indicator / Rear Brake Disc/Pads Find Address “1-2-3-4-5 1st Street, GENESIS Steering Gear Box, Linkage & Boots/ Lower <House #, Street, Fountain Valley” TPMS malfunction indicator Arm Ball Joint, Upper Arm Ball Joint City, State> Find <POI Name> “Find McDonald’s®” NOTE: Tire pressure may vary in colder temperatures causing the Suspension Mounting Bolts low tire pressure indicator to illuminate. Inflate tires according to Propeller Shaft GV70 Located on Rearview Mirror Inspect 7,500 or 6 mos. -

IFX Day 2003
IFX Day 2003 Munich – September 22, 2003 Industrial and Horse Power Dr. Reinhard Ploss SVP & GM of Automotive & Industrial Group N e v e r s t o p t h i n k i n g . IFX Day 2003 - Munich Dr. Reinhard Ploss Page 1 Copyright © Infineon Technologies 2003. All rights reserved. Disclaimer Please note that while you are reviewing this information, this presentation was created as of the date listed, and reflected management views as of that date. This presentation contains certain forward-looking statements that are subject to known and unknown risks and uncertainties that could cause actual results to differ materially from those expressed or implied by such statements. Such risks and uncertainties include, but are not limited to the Risk Factors noted in the Company's Earnings Releases and the Company's filings with the Securities and Exchange Commission. IFX Day 2003 - Munich Dr. Reinhard Ploss Page 2 Copyright © Infineon Technologies 2003. All rights reserved. New York August 14, 2003 London August 28, 2003 IFX Day 2003 - Munich Dr. Reinhard Ploss Page 3 Copyright © Infineon Technologies 2003. All rights reserved. Power Semiconductors, Power Modules and Microcontrollers for the Entire Energy Supply Chain Power Distribution Key Products: Thyristors and diodes IGBT- and bipolar modules Energy Treatment Power Management 8 bit and 16 bit Key Products: (Supplies and Drives) microcontrollers Thyristors and diodes Key Products: ® 32 bit TriCore IGBT- and bipolar Discrete Power microcontrollers (incl. DSP) modules Power Control ICs 8 bit and 16 bit microcontrollers 32 bit TriCore® microcontrollers IFX Day 2003 - Munich Dr. Reinhard Ploss (incl.