Deep Space Exploration Robotics for Improved Capability, Utilization, and Flexibility on a Cislunar Habitat
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Toward Designing Social Human-Robot Interactions for Deep Space Exploration
Toward Designing Social Human-Robot Interactions for Deep Space Exploration Huili Chen Cynthia Breazeal MIT Media Lab MIT Media Lab [email protected] [email protected] ABSTRACT sleep deprivation, decrease in group cohesion, and decrease in mo- In planning for future human space exploration, it is important to tivation [8]. On the team level, factors related to interpersonal consider how to design for uplifting interpersonal communications communications and group dynamics among astronauts also deci- and social dynamics among crew members. What if embodied social sively impact mission success. For example, astronauts will have to robots could help to improve the overall team interaction experi- live in an ICE condition for the entirety of the mission, necessitating ence in space? On Earth, social robots have been shown effective group living skills to combat potential interpersonal problems [11]. in providing companionship, relieving stress and anxiety, fostering Their diverse cultural backgrounds may additionally impact coping connection among people, enhancing team performance, and medi- in an ICE environment and interplanetary crew’s behavior [49]. ating conflicts in human groups. In this paper, we introduce asetof Unlike shorter-duration space missions, LDSE missions require as- novel research questions exploring social human-robot interactions tronauts to have an unprecedented level of autonomy, leading to in long-duration space exploration missions. greater importance of interpersonal communication among crew members for mission success. The real-time support and interven- KEYWORDS tions from human specialists on Earth (e.g., psychologist, doctor, conflict mediator) are reduced to minimal due to costly communi- Human-robot Interaction, Long-duration Human Space Mission, cation and natural delays in communication between space and Space Robot Companion, Social Connection Earth. -

Global Exploration Roadmap
The Global Exploration Roadmap January 2018 What is New in The Global Exploration Roadmap? This new edition of the Global Exploration robotic space exploration. Refinements in important role in sustainable human space Roadmap reaffirms the interest of 14 space this edition include: exploration. Initially, it supports human and agencies to expand human presence into the robotic lunar exploration in a manner which Solar System, with the surface of Mars as • A summary of the benefits stemming from creates opportunities for multiple sectors to a common driving goal. It reflects a coordi- space exploration. Numerous benefits will advance key goals. nated international effort to prepare for space come from this exciting endeavour. It is • The recognition of the growing private exploration missions beginning with the Inter- important that mission objectives reflect this sector interest in space exploration. national Space Station (ISS) and continuing priority when planning exploration missions. Interest from the private sector is already to the lunar vicinity, the lunar surface, then • The important role of science and knowl- transforming the future of low Earth orbit, on to Mars. The expanded group of agencies edge gain. Open interaction with the creating new opportunities as space agen- demonstrates the growing interest in space international science community helped cies look to expand human presence into exploration and the importance of coopera- identify specific scientific opportunities the Solar System. Growing capability and tion to realise individual and common goals created by the presence of humans and interest from the private sector indicate and objectives. their infrastructure as they explore the Solar a future for collaboration not only among System. -

Lunar Base Camp Is the First Step Towards the Establishment of a Permanent Lunar Base for Long Duration Human Exploration
Background NASA and international partners are planning the next steps of human exploration by establishing assets near the Moon, where astronauts will build the systems that are needed for deep space exploration. The space near the Moon offers an excellent environment for testing the systems that are needed for extended exploration missions to other destinations like Mars. To support these missions, NASA is working with commercial partners to develop hardware to support missions around the Moon that are more ambitious than ever before. The first phase of this development effort will utilize current technologies to allow astronauts to gain operational experience spending weeks, rather than days, away from Earth. These missions will enable NASA to develop the techniques and systems that will solve the challenges that astronauts will face when traveling to Mars and other exploration destinations. Although NASA is focusing on Mars exploration as its long term mission planning goal, there are a plethora of exploration missions that can be conducted in cis-lunar space that can extend our knowledge of the solar system and prepare for those future missions. NASA and its international partners are keenly interested in the exploration of the lunar surface and the potential utilization of lunar resources. Establishment of a permanent lunar surface base could provide both experience for astronauts and potential resources that can be utilized to support future Mars missions. The deployment of a lunar base camp is the first step towards the establishment of a permanent lunar base for long duration human exploration. This Request for Proposal seeks an innovative idea and engineering design to commercially procure a fully functional lunar base camp for a planned lunar expedition in 2031. -

China's Planning for Deep Space Exploration and Lunar Exploration
0254-6124/2018/38(5)-591–02 Chin. J. Space Sci. ¤¢£¥¥¡ XU Lin, ZOU Yongliao, JIA Yingzhuo. China’s planning for deep space exploration and lunar exploration before 2030. Chin. J. Space Sci., 2018, 38(5): 591-592. DOI:10.11728/cjss2018.05.591 China’s Planning for Deep Space Exploration and Lunar Exploration before 2030∗ XU Lin ZOU Yongliao JIA Yingzhuo (State Key Laboratory of Space Weather, National Space Science Center, Chinese Academy of Sciences, Beijing 100190) Abstract The current lunar exploration has changed from a single scientific exploration to science and resource utilization. On the basis of the previous lunar exploration, Chinese scientists and technical experts have proposed an overall plan to preliminarily build a lunar research station on the lunar South Pole by several missions before 2035, exploring of the moon, as well as the use of lunar platforms and in-site utilization of resources. In addition, China will also explore Mars, asteroids and Jupiter and its moons. This paper briefly introduces the ideas of Chinese scientists and technical experts on the lunar and deep space exploration. Key words Deep space exploration, Lunar exploration, Mars exploration Classified index P3 ionospheric climates and environment of Mars. 1 Deep Space Exploration Program 1.2 Asteroid Exploration Mission of China before 2030 China’s asteroid exploration is planned to conduct by 2030. The mission includes flyby observation, global There will be four missions for the deep space ex- remote sensing, landing and in-situ measurement and ploration of China between 2020–2030, including sample return. two Mars exploration missions, one asteroid explo- The scientific goals include: to measure the phy- ration mission, the Jupiter system (Jupiter and its sical features and detect the topography, surface com- moons) and interplanetary exploration mission be- position, internal structure, space weathering, and yond Jupiter. -

The Orion Spacecraft As a Key Element in a Deep Space Gateway
The Orion Spacecraft as a Key Element in a Deep Space Gateway A Technical Paper Presented by: Timothy Cichan Lockheed Martin Space [email protected] Kerry Timmons Lockheed Martin Space [email protected] Kathleen Coderre Lockheed Martin Space [email protected] Willian D. Pratt Lockheed Martin Space [email protected] July 2017 © 2014 Lockheed Martin Corporation Abstract With the Orion exploration vehicle and Space Launch System (SLS) approaching operational status, NASA and the international community are developing the next generation of habitats to serve as a deep space platform that will be the first of its kind, a cislunar Deep Space Gateway (DSG). The DSG is evolvable, flexible, and modular. It would be positioned in the vicinity of the Moon and allow astronauts to demonstrate they can operate for months at a time well beyond Low Earth Orbit. Orion is the next generation human exploration spacecraft being developed by NASA. It is designed to perform deep space exploration missions, and is capable of carrying a crew of 4 astronauts on independent free-flight missions up to 21 days, limited only by consumables. Because Orion meets the strict requirements for deep space flight environments (reentry conditions, deep-space communications, safety, radiation, and life support for example) it is a key element in a DSG and is more than just a transportation system. Orion has the capability to act as the command deck of any deep space piloted vehicle. To increase affordability and reduce the complexity and number of subsystem functions the early DSG must be responsible for, the DSG can leverage these unique deep space qualifications of Orion. -

The Future of Deep Space Exploration
The Potomac Institute for Policy Studies CEEDS Center Presents The Future of Deep Space Exploration Potomac Institute for Policy Studies The Future of Deep Space Exploration or decades, the US has led the charge in space exploration. American astronauts were the first to land Fon the moon. NASA’s Pioneer, Galileo, Voyager, NEAR, and Cassini-Huygens missions continued to forge ahead: first to fly by Saturn, Uranus, and Neptune; first to orbit Jupiter and Saturn; first to land on an asteroid and first to land on Titan. These are but a few of the achievements of American deep space exploration over the last five decades. So what efforts are continuing today, and what does the future look like? On October 16, 2019, the Potomac Institute for Policy Studies’ (PIPS) Center for Enterprise, Exploration, and Defense in Space (CEEDS) held a seminar titled: “The Future of Deep Space Explora- tion” to examine and discuss issues related to the next steps in the manned and unmanned exploration of our solar system. It is important to first understand why it is beneficial to continue space exploration. The exploration of space has been a beacon of US leadership since the first moon landing. It has increased American prestige and allowed the US to be the de facto leader in developing the norms of space operations. Space exploration is the perfect opportunity for international collaboration to strengthen partnerships. Like the expedition of Lewis and Clarke, it is the first step in a greater move into the solar system. Without exploration, there can be no return trips, and certainly no permanent home elsewhere in space. -

Mars-Base-Camp-2028.Pdf
Mars Base Camp An Architecture for Sending Humans to Mars by 2028 A Technical Paper Presented by: Timothy Cichan Stephen A. Bailey Lockheed Martin Space Deep Space Systems, Inc. [email protected] [email protected] Scott D. Norris Robert P. Chambers Lockheed Martin Space Lockheed Martin Space [email protected] [email protected] Robert P. Chambers Joshua W. Ehrlich Lockheed Martin Space Lockheed Martin Space [email protected] [email protected] October 2016 978-1-5090-1613-6/17/$31.00 ©2017 IEEE Abstract—Orion, the Multi-Purpose Crew Vehicle, near term Mars mission is compelling and feasible, is a key piece of the NASA human exploration and will highlight the required key systems. architecture for beyond earth orbit (BEO). Lockheed Martin was awarded the contracts for TABLE OF CONTENTS the design, development, test, and production for Orion up through the Exploration Mission 2 (EM- 1. INTRODUCTION ..................................................... 2 2). Additionally, Lockheed Martin is working on 2. ARCHITECTURE PURPOSE AND TENETS ....................... 3 defining the cis-lunar Proving Ground mission 3. MISSION CAMPAIGN, INCLUDING PROVING GROUND architecture, in partnership with NASA, and MISSIONS ................................................................ 5 exploring the definition of Mars missions as the 4. MISSION DESCRIPTION AND CONCEPT OF OPERATIONS . 7 horizon goal to provide input to the plans for 5. ELEMENT DESCRIPTIONS ....................................... 13 human exploration of the solar system. This paper 6. TRAJECTORY DESIGN ............................................ 16 describes an architecture to determine the 7. SCIENCE ............................................................. 19 feasibility of a Mars Base Camp architecture 8. MARS SURFACE ACCESS FOR CREW ......................... 14 within about a decade. -
Deep Space Exploration Roadmap
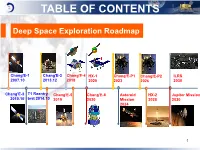
TABLE OF CONTENTS Deep Space Exploration Roadmap Chang'E-1 Chang'E-3 Chang'E-4 HX-1 Chang'E-P1 Chang'E-P2 ILRS 2007.10 2013.12 2018 2020 2023 2026 2030 Chang'E-2 T1 Reentry Chang'E-5 Chang'E-6 Asteroid HX-2 Jupiter Mission 2010.10 test 2014.10 2019 2020 Mission 2028 2030 2024 1 Deep Space Exploration Roadmap Chang'E-1 Chang'E-2 Chang'E-3 Launched in Oct., 2007; Launched in Oct., 2010; Launched on Dec. 2nd, Carried out lunar global 2013; Explored Sun-earth L2; survey through remote On Dec. 14th, 2013, S/C December 13th, 2012, flyby sensing. Obtained lunar successfully soft landed in Asteroid 4179 Toutatis. global image and elevation designated area of Sinus map with 120m in Iridium. resolution. Mapping the abundance and distribution of various chemical elements . 2 Deep Space Exploration Roadmap Chang’E-4 Mission Land at Aitken basin of moon farside by human S/C for the first time. Communicate relay at Earth-moon L2 point. Conduct low frequency radio observation, shallow structure investigation. At flight model development phase. Relay satellite Launched in May, 2018. 3 Deep Space Exploration Roadmap Chang'E-5 Mission Autonomous lunar sampling and return to the Earth. Launched by Long March 5 rocket at Wenchang Satellite Launch Center in 2019. Study topography and geological structure, mineral composition, regolith thickness and structure. 4 Deep Space Exploration Roadmap First Mars Mission HX-1 To be launched in 2020. Scientific Objective • Feature topography and geology and their variations; • Characterize soil and water-ice content. -
Charting the Course for Sustainable Human Space Exploration Table of Contents
National Aeronautics and Space Administration Voyages Charting the Course for Sustainable Human Space Exploration Table of Contents Executive Summary: Charting the Course 2 NASA Vision Why We Explore 4 Reach for How We Explore: A Capability-Driven Approach 6 new heights and reveal The International Space Station: Cornerstone the unknown, of Human Space Exploration 8 so that what we do and learn Destination: Cis-Lunar Space 10 will benefit all Destination: Near-Earth Asteroid 12 humankind. Destination: Moon 14 Destination: Mars 16 NASA Mission Capabilities: Foundations of Human Space Exploration 18 Drive advances Transportation Capabilities 20 in science, technology, Capabilities for Mission Operations 24 and exploration to enhance Habitation and Destination Capabilities 26 knowledge, Conclusion: Firsts from LEO to Mars 32 education, innovation, Acknowledgements 34 economic vitality, and stewardship of Earth. 1 Executive Summary: Charting the Course This report articulates NASA’s multi-destination human space exploration strategy using a capability-driven approach NASA is ensuring that the United States fosters a safe, robust, affordable, sustainable, and flexible space program by developing a set of core evolving capabilities instead of specialized, destination-specific hardware These core capabilities allow NASA the flexibility to conduct increasingly complex missions to a range of destinations over time By expanding human presence throughout the solar system, we increase our scientific knowledge, enable technological and economic growth, -

The Mutual Orbit, Mass, and Density of the Large Transneptunian Binary System Varda and Ilmarë
The Mutual Orbit, Mass, and Density of the Large Transneptunian Binary System Varda and Ilmarë W.M. Grundya, S.B. Porterb, S.D. Benecchic, H.G. Roea, K.S. Nolld, C.A. Trujilloe, A. Thirouina, J.A. Stansberryf, E. Barkerf, and H.F. Levisonb a. Lowell Observatory, 1400 Mars Hill Rd., Flagstaff AZ 86001. b. Southwest Research Institute, 1050 Walnut St. #300, Boulder CO 80302. c. Planetary Science Institute, 1700 E. Fort Lowell Suite 106, Tucson AZ 85719. d. NASA Goddard Space Flight Center, Greenbelt MD 20771. e. Gemini Observatory, 670 N. A'ohoku Place, Hilo HI 96720. f. Space Telescope Science Institute, 3700 San Martin Dr., Baltimore MD 21218. ―― In press in Icarus ―― Abstract From observations by the Hubble Space Telescope, Keck II Telescope, and Gemini North Telescope, we have determined the mutual orbit of the large transneptunian object (174567) Varda and its satellite Ilmarë. These two objects orbit one another in a highly inclined, circular or near-circular orbit with a period of 5.75 days and a semimajor axis of 4810 km. This orbit reveals the system mass to be (2.664 ± 0.064) × 1020 kg, slightly greater than the mass of the second most massive main-belt asteroid (4) Vesta. The dynamical mass can in turn be combined with estimates of the surface area of the system from Herschel Space Telescope thermal + 0.50 −3 observations to estimate a bulk density of 1.24−0.35 g cm . Varda and Ilmarë both have colors similar to the combined colors of the system, B–V = 0.886 ± 0.025 and V–I = 1.156 ± 0.029. -

The Kuiper Belt: Launch Opportunities from 2025 to 2040
Return to the Kuiper Belt: launch opportunities from 2025 to 2040 Amanda M. Zangari,* Tiffany J. Finley† and S. Alan Stern‡ Southwest Research Institute 1050 Walnut St, Suite 300, Boulder, CO 80302, USA and Mark B. Tapley§ Southwest Research Institute P.O. Drawer 28510 San Antonio, Texas 78228-0510 Nomenclature AU = astronomical unit, average Earth - Sun distance B = impact parameter C3 = excess launch energy ∆V = change in velocity required to alter a spacecraft's trajectory KBO = Kuiper Belt Object PC = plane crossing rp = planet radius rq = distance from a planet at periapse � = gravitational constant * planet mass �! = arrival velocity of a spacecraft � = angle between incoming and outgoing velocity vectors during a swingby * Research Scientist, Space Science and Engineering, [email protected] † Principal Engineer, Space Science and Engineering, AIAA Member, [email protected] † Principal Engineer, Space Science and Engineering, AIAA Member, [email protected] ‡ Associate Vice President-R&D, Space Science and Engineering, AIAA Member, [email protected] § Institute Engineer, Space Science and Engineering, AIAA Senior Member, [email protected] Preliminary spacecraft trajectories for 45 Kuiper Belt Objects (KBOs) and Pluto suitable for launch between 2025 and 2040 are presented. These 46 objects comprise all objects with H magnitude < 4.0 or which have received a name from the International Astronomical Union as of May 2018. Using a custom Lambert solver, trajectories are modeled after the New Horizons mission to Pluto-Charon, which consisted of a fast launch with a Jupiter gravity assist. In addition to searching for Earth-Jupiter-KBO trajectories, Earth-Saturn-KBO trajectories are examined, with the option to add on a flyby to either Uranus or Neptune. -
Movement and Maneuver in Deep Space: a Framework to Leverage Advanced Propulsion
Movement and Maneuver in Deep Space A Framework to Leverage Advanced Propulsion Brian E. Hans, Major, USAF Christopher D. Jefferson, Major, USAF Joshua M. Wehrle, Major, USAF Air University Steven L. Kwast, Lieutenant General, Commander and President Air Command and Staff College Thomas H. Deale, Brigadier General, Commandant Bart R. Kessler, PhD, Dean of Distance Learning Robert J. Smith, Jr., Colonel, PhD, Dean of Resident Programs Michelle E. Ewy, Lieutenant Colonel, PhD, Director of Research Liza D. Dillard, Major, Series Editor Peter Garretson, Lieutenant Colonel, Essay Advisor Selection Committee Kristopher J. Kripchak, Major Michael K. Hills, Lieutenant Colonel, PhD Barbara Salera, PhD Jonathan K. Zartman, PhD Please send inquiries or comments to Editor The Wright Flyer Papers Department of Research and Publications (ACSC/DER) Air Command and Staff College 225 Chennault Circle, Bldg. 1402 Maxwell AFB AL 36112-6426 Tel: (334) 953-3558 Fax: (334) 953-2269 E-mail: [email protected] AIR UNIVERSITY AIR COMMAND AND STAFF COLLEGE MOVEMENT AND MANEUVER IN DEEP SPACE A FRAMEWORK TO LEVERAGE ADVANCED PROPULSION Brian E. Hans, Major, USAF Christopher D. Jefferson, Major, USAF Joshua M. Wehrle, Major, USAF Wright Flyer Paper No. 67 Air University Press Curtis E. LeMay Center for Doctrine Development and Education Maxwell Air Force Base, Alabama Accepted by Air University Press April 2017 and published May 2019. Project Editor Dr. Stephanie Havron Rollins Copy Editor Carolyn B. Underwood Cover Art, Book Design, and Illustrations Leslie Fair Composition and Prepress Production Megan N. Hoehn AIR UNIVERSITY PRESS Director, Air University Press Lt Col Darin Gregg Air University Press Disclaimer 600 Chennault Circle, Building 1405 Maxwell AFB, AL 36112-6010 The views expressed in this academic research paper are those of https://www.airuniversity.af.edu/AUPress/ the author and do not reflect the official policy or position of the US government or the Department of Defense.