A Power Coupling System for Electric Tracked Vehicles During High-Speed Steering with Optimization-Based Torque Distribution Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Caterpillar (CAT) Excavators, Dozers, & Motor Graders Machine.Market
D6R ® Series II Track-Type Tractor Cat® Engine C9 Operating Weights Standard Standard 18 300 kg Gross Power 141 kW/189 hp XL 18 700 kg Flywheel Power 123 kW/165 hp XW 19 900 kg XL/XW/LGP LGP 20 500 kg Gross Power 157 kW/210 hp Blade Capacity Range 3.18 m3 - 5.62 m3 Flywheel Power 138 kW/185 hp Courtesy of Machine.Market D6R Series II Track-Type Tractor The D6R Series II power, response and control deliver more production at lower cost-per-yard. Engine Advanced Modular Cooling System Drive Train ✔ The rugged, easy-to-service C9 engine (AMOCS) ✔ Matched with the electronic engine features an electronically controlled, AMOCS utilizes an exclusive two pass control, the Caterpillar® electronic direct injection fuel system for cooling system and increased cooling transmission control allows the power improved fuel efficiency and reduced surface area to provide significantly train to work more efficiently. pg. 6 emissions. The C9 meets EPA, EU more cooling efficiency than and JMOC emissions regulations. pg. 4 conventional cooling systems. ✔ Air-to-air aftercooler improves engine performance and reduces emissions. pg. 5 Structure Undercarriage Mainframe is heavy, strong and durable. With the elevated sprocket design, the Strong case, steel castings and final drives are located above the work reinforced frame rails provide durable area, isolating them from ground support to the undercarriage, elevated induced impacts. The different final drives and other integral frame undercarriage configurations allow you components. pg. 7 to match the machine to the application. pg. 12 Engineered for demanding work, the D6R Series II is designed to be productive in a variety of applications. -

Specifications
Specifications Model Unit T80 (Narrow) T80 (Standard) T80COMFORT CAB EDITION Engine Net Hp @2600 RPM* HP (kw) 78 (58) Horsepower PTO HP @2600 RPM* HP (kw) 66 (50) Type 4 - Cylinder Turbocharged Diesel Engine Engine Model 4TNV98T Displacement cu.in. (L) 203 (3.3) Fuel Capacity US gal. (L) 38 (146) Type Collar Shift with Hydraulic Shuttle Transmission Speed 12F /12R Max. Travel Speed mph (km/h) 10 (16) Brakes Wet Multi-Disk Steering System FDS (Forced Differential Steering) Type Fully Independent Power Takeoff Speed RPM 540 Type Open-Center Hydraulic System Hydraulic Implement Pump GPM (Lpm) 12.6 (48) Category 2/1 Rear 3-Point Hitch Lift Capacity @ OECD Frame lb. (kg) 4400 (2000) Type Rubber (with embedded metal core and wires) Tracks Track Width 11 (280) 18 (450) Overall Length in. (mm) 146 (3715) Overall Width in. (mm) 52 (1310) 65 (1650) Dimensions Overall Height in. (mm) 97 (2460) 96.5 (2445) Tractor Weight lb. (kg) 7055 (3200) 7407 (3360) Ground Pressure* psi (MPa) 4.9 (0.034) 3.2 (0.022) * Manufacturer’s Estimate Attachments in. 97 Weight Set - 66lbs x 8pcs 145 in. 65 in. 52 in. YANMAR AGRICULTURAL EQUIPMENT CO., LTD. HEAD OFFICE 1-32, Chayamachi, Kita-ku, Osaka 530-8321 JAPAN YANMAR AMERICA CORPORATION 101 INTERNATIONAL PKWY, ADAIRSVILLE, GA 30103 TEL: 770.877.9894 WWW.YANMARTRACTOR.COM The information in this brochure is accurate as of the date of printing and subject to change. All rights reserved by and belong to YANMAR®. Copyright 2014. Get on Track All Weather, Day or Night Driver’s Cab Inside the T80-CCE’s heated and air-conditioned Through its low compaction, outstanding mobility, easy operation, simple maintenance and lots of field-oriented driver’s station a floating deck system of anti-vibration rubber body mounts has been features, Yanmar’s T80 Comfort Cab Edition (CCE) rubber-track crawler brings new and innovative benefits incorporated to reduce both vibration and noise factors for the operator. -

Development and Analysis of a Multi-Link Suspension for Racing Applications
Development and analysis of a multi-link suspension for racing applications W. Lamers DCT 2008.077 Master’s thesis Coach: dr. ir. I.J.M. Besselink (Tu/e) Supervisor: Prof. dr. H. Nijmeijer (Tu/e) Committee members: dr. ir. R.M. van Druten (Tu/e) ir. H. Vun (PDE Automotive) Technische Universiteit Eindhoven Department Mechanical Engineering Dynamics and Control Group Eindhoven, May, 2008 Abstract University teams from around the world compete in the Formula SAE competition with prototype formula vehicles. The vehicles have to be developed, build and tested by the teams. The University Racing Eindhoven team from the Eindhoven University of Technology in The Netherlands competes with the URE04 vehicle in the 2007-2008 season. A new multi-link suspension has to be developed to improve handling, driver feedback and performance. Tyres play a crucial role in vehicle dynamics and therefore are tyre models fitted onto tyre measure- ment data such that they can be used to chose the tyre with the best characteristics, and to develop the suspension kinematics of the vehicle. These tyre models are also used for an analytic vehicle model to analyse the influence of vehicle pa- rameters such as its mass and centre of gravity height to develop a design strategy. Lowering the centre of gravity height is necessary to improve performance during cornering and braking. The development of the suspension kinematics is done by using numerical optimization techniques. The suspension kinematic objectives have to be approached as close as possible by relocating the sus- pension coordinates. The most important improvements of the suspension kinematics are firstly the harmonization of camber dependant kinematics which result in the optimal camber angles of the tyres during driving. -
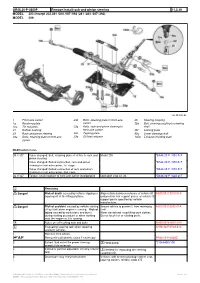
Remove/Install Rack-And-Pinion Steering 11.3.10 MODEL 203 (Except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209
AR46.20-P-0600P Remove/install rack-and-pinion steering 11.3.10 MODEL 203 (except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209 P46.20-2123-09 1 Front axle carrier 23b Bolts, retaining plate to front axle 25 Steering coupling 1g Retaining plate carrier 25a Bolt, steering coupling to steering 10a Tie rod joints 23g Bolts, rack-and-pinion steering to shaft 21 Rubber bushing front axle carrier 25f Locking plate 23 Rack-and-pinion steering 23n Tapping plate 80a Lower steering shaft 23a Bolts, retaining plate to front axle 23q Oil lines retainer 105d Exhaust shielding plate carrier Modification notes 29.11.07 Value changed: Bolt, retaining plate of oil line to rack-and- Model 203 *BA46.20-P-1001-01F pinion steering Value changed: Bolted connection, rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 1st stage Value changed: Bolted connection of rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 2nd stage 30.11.07 Torque, retaining plate to front axle carrier incorporated Operation step 23, 24 *BA46.20-P-1004-01F Removing Danger! Risk of death caused by vehicle slipping or Align vehicle between columns of vehicle lift AS00.00-Z-0010-01A toppling off of the lifting platform. and position four support plates at vehicle lift support points specified by vehicle manufacturer. Danger! Risk of accident caused by vehicle starting Secure vehicle to prevent it from moving by AS00.00-Z-0005-01A off by itself when engine is running. Risk of itself. -

The Project Design of the Tracked Vehicle Hydraulic Mechanical Differential Steering Zhaozhong Yang
2nd International Conference on Advances in Mechanical Engineering and Industrial Informatics (AMEII 2016) The Project Design of the Tracked Vehicle Hydraulic Mechanical Differential Steering Zhaozhong Yang1, a, Liwei Wang2, b, Caoyang Shi3, c 1,2troops 63981, Wuhan, 430311, China 3A Agent's Room, Zhangjiakou, 075041, China aemail: [email protected],bemail: [email protected], cemail:[email protected] Keywords: Tracked vehicle; The hydraulic mechanical differential steering; Design Abstract. Based on the principle of hydraulic mechanical stepless transmission is tracked vehicle hydraulic mechanical differential steering system can effectively improve the vehicle's steering can win, is has good prospects for development of a tracked vehicle steering model. Papers on tracked vehicle and its present situation and trend of development of the steering system, analysis of the hydraulic mechanical differential steering system structure, working principle, the vehicle steering lung can and on the basis of the research and application status at home and abroad, puts forward the main content of the steering system research and to solve the problem. In the output shunt transmission and input shunt two basic hydraulic mechanical transmission based on the analysis of the features, according to the requirements of the tracked vehicle steering, identified a new type of hydraulic mechanical differential steering system transmission scheme, this scheme has the advantages of simple structure and increasing the torsional speed down, caterpillar vehicle is suitable for agricultural use. Introduction Tracked vehicles, as a kind of "spread" the road vehicles, its unique travel system to make it a wheeled vehicle has many outstanding advantages: big traction, suitable for heavy duty operation, such as, rake and earthmoving operations; Grounding than the small, the farmland on the compaction, the extent of damage light; Across the ditch the bunds ability, etc. -

Design of Constant Velocity Coupling
Design of Constant Velocity Coupling Prof. A. A. Moghe1, Mr. Yuvraj Patil2, Mr. Mayur Pawar³, Mr. Akshaykumar Thaware4, Mr. Nitin Thorawade5 1Assistant Professor, 2,3,4,5UG Students Department of Mechanical Engineering Sppu, PVPIT, Pune, Mahrashtra, India ABSTRACT: A coupling is mechanical device used to connect two shafts together at their ends for the purpose of transmission of power. The basic role of couplings is to join two parts of rotating elements while permitting some degree of misalignment or end movement or both. Presently Oldham’s coupling and Universal joints are used for parallel offset power transmission and angular offset transmission. These joints have limitations on maximum offset distance, angle, speed and result in vibrations, noise and low efficiency (below 70%). These limitations can be overcome with Thompson constant velocity (CV) coupling which offers features like minimizing side loads, higher misalignment capabilities, more operating speeds, improved efficiency of transmission and many more. The constant velocity joint is an alteration in design that offers up to 18 mm parallel offset and 21-degree angular offset, at high speeds up to 2000 or 2500 rpm at 90% efficiency. This design lowers cost of production, space requirement and simply technology of manufacture as compared too present CVJ in market. This paper presents review on constant velocity joints/couplings design and optimization. Keywords: Thompson constant velocity joint, Optimization & design, Constant velocity couplings, Parallel Offset, Angular Offset, Power Transmission. [I] INTRODUCTION The basic function of a power transmission coupling is to transmit torque from an input/driving shaft to an output/driven shaft at a specified shaft speed. -

Public Auction
1 OF 5 New as 1 OF 7 New as 2010 2012 TION (5) CATERPILLAR, KOMATSU & KUBOTA Excavators, New as 2010 (7) KUBOTA, TEREX, INTERNATIONAL, CATERPILLAR & Other Track & Wheel Loaders Family Retiring After 75 Successful Years 1 OF 5 MIKE DELUCIO & SON, INC. 3436 Chester Blvd. in Richmond, Indiana 47374 FRIDAY, DECEMBER 11TH STARTING AT 10AM Inspection: Day prior to auction from 9AM - 4PM PUBLIC AUC Low Hours, Low Miles, Always Under Roof (5) CASE, FORD & NEW HOLLAND Backhoes 3 OF 13 1 OF 2 (13) CATERPILLAR, CASE, INTERNATIONAL & JOHN DEERE Dozers (2) MACK CH613 & R688ST Truck Tractors 2004 1 OF 5 1 OF 9 2004 MACK Granite T/A Roll Off Truck (5) BOMAG, CATERPILLAR, RAYCO & Other Compactors 1 OF 10 1 OF 9 New as 2010 (10) LOAD KING, FELLING, TALBERT & Other Trailers (9) GMC, CHEVROLET & FORD Service (9) MACK, PETERBILT, CHEVROLET & Other Dump Trucks & Pickup Trucks, New as 2010 MIKE DELUCIO & SON, INC. / 3436 CHESTER BLVD. IN RICHMOND, INDIANA 47374 2008 3,337 2007 1,065 HOURS HOURS 2008 CATERPILLAR 320D LRR Acert C6.4 Excavator 2007 KOMATSU PC138USLC-E0 Excavator CATERPILLAR M312 Wheel Excavator 2005 CATERPILLAR D8N Dozer 2005 CATERPILLAR D7R Series II Dozer 2003 CATERPILLAR D6N LGP DOZER 2004 2,580 3,361 HOURS HOURS 2004 CATERPILLAR D6RXL Series II Dozer 2002 CATERPILLAR D6MXL Dozer CATERPILLAR D6MXL Dozer 2011 832 2012 997 HOURS HOURS 2011 KUBOTA SVL75 Compact Track Loader 2012 TEREX PT-80 Compact Track Loader INTERNATIONAL DRESSER 540 Wheel Loader Low as 3,225 EXCAVATORS 4,175 HOURS 2008 CAT 320D LRR Acert C6.4, 9’-6” Stick, Hyd. -
Installation and Operating Manual
Installation and Operating Manual (Translation of the original installation and operating manual) T… (with GPK) Turbo Coupling with Constant Fill, Connecting Coupling Type GPK (All-metal Disk Pack Coupling) including design as per Directive 2014/34/EU (ATEX directive) Version 10 , 2017-06-01 3626-011700 en, Protection Class 0: public Serial No. 1) Coupling type 2) Year of manufacture Mass (weight) kg Power transmission kW Input speed rpm mineral oil Operating fluid water Filling volume dm3 (liters) Number of screws z 3) Nominal response temperature of °C fusible plugs Connecting coupling type GPK Sound pressure level LPA,1m dB Installation position horizontal (max. 7°) Drive via outer wheel 1) Please indicate the serial number in any correspondence ( Chapter 18). 2) T...: oil / TW...: water. 3) Determine and record the number of screws z ( Chapter 10.1). Please consult Voith Turbo in case that the data on the cover sheet are incomplete. Turbo Coupling with constant fill (Connecting Coupling Type GPK) Contact Contact Voith Turbo GmbH & Co. KG Division Industry Voithstr. 1 74564 Crailsheim, GERMANY Tel. + 49 7951 32 599 Fax + 49 7951 32 554 [email protected] www.voith.com/fluid-couplings 3626-011700 en This document describes the state of de- 011700 sign of the product at the time of the - editorial deadline on 2017-06-01. / 3626 / 10 01 - 06 Copyright © by - Voith Turbo GmbH & Co. KG / 2017 / This document is protected by copyright. public 0: It must not be translated, duplicated (mechanically or electronically) in whole or in part, nor passed on to third parties without the publisher's written approval. -

Power Steering
Module-3 POWER STEERING Introduction: The steering system of a vehicle is one of its key components. In a hydraulic power steering system, the effort required to turn the wheel of a vehicle by the rotation of the steering wheel is reduced with the help of hydraulic assistance. Power steering is an advanced form of steering system in which the overall effort required by the driver is reduced through an increase in the force applied on the steering wheel with the help of either electric or hydraulic assistance. In a normal steering mechanism, in comparison to the power steering mechanism, there is no hydraulic or electrical assistance to reduce the effort of turning the steering wheel. The rest of the mechanical components and their working remain the same between the two steering systems, minus the parts which are exclusive to a power steering system. Three main types of power steering: • Hydraulic Power Steering: In a hydraulic power steering system, the effort required to turn the wheel of a vehicle by the rotation of the steering wheel is reduced with the help of hydraulic assistance. When the steering wheel is turned, a hydraulic pump, which draws power from the vehicle’s engine, starts to pump hydraulic fluid through the system’s lines. This high-pressure hydraulic fluid then enters a cylinder and exerts force on the cylinder piston. This piston then pushes the hydraulic fluid ahead of it through the system’s lines, which in turn exerts pressure on the rack and pinion, coupling arrangement, multiplying the input force several times and resulting in the rotation of the vehicle’s front wheels. -

OK Shaft Couplings Contents
OK shaft couplings Contents The clever connection 3 OK couplings explained 4 OKCX and OKFX – friction-coated shaft coupling from SKF 6 More than 50 000 connections 8 Shaft couplings OKC 045 – 090 9 OKC 100 – 190 10 OKC 200 – 400 11 OKC 410 – 490 12 OKC 500 – 520 12 OKC 530 – 1000 13 Friction-coated shaft couplings OKCX 100 – 210 14 OKCX 220 – 490 15 OKCX 500 – 690 16 OKCX 700 – 900 17 Flange couplings OKF 100 – 300 18 OKF 310 – 700 19 Hydraulic rings and propeller nuts OKTC 245 – 790 20 Your individual offer 21 Tailor-made OK couplings 22 Power transmission capacity 23 Shafts 24 Conversion tables 24 Hollow shafts for OKC couplings 25 Hollow shafts for OKF couplings 25 Modular equipment for mounting and dismounting 26 Oil 28 Approved by all leading classiication societies 28 Locating device for outer sleeve and nut 29 Mounting arrangements for OK couplings 29 The SKF Supergrip Bolt cuts downtime 30 22 The clever connection When using OK couplings for shaft connections, you are gaining ben- When the outer sleeve has reached its inal position, an interference eit from the advantages of our powerful oil injection method it is created just as if the outer sleeve had been heated and shrunk on But no heat is required, and the coupling can be removed as eas- Preparation of the shaft is simple There are no keyways to machine, ily as it was mounted no taper and no thrust ring This powerful use of friction enables the OK coupling to transmit When mounting OK coupling, a thin inner sleeve with a tapered outer torque and axial loads over the entire -
Getting Started with Lotus Suspension Analysis
VERSION 5.01 GETTING STARTED WITH LOTUS SUSPENSION ANALYSIS VERSION 5.04 The information in this document is furnished for informational use only, may be revised from time to time, and should not be construed as a commitment by Lotus Cars Ltd or any associated or subsidiary company. Lotus Cars Ltd assumes no responsibility or liability for any errors or inaccuracies that may appear in this document. This document contains proprietary and copyrighted information. Lotus Cars Ltd permits licensees of Lotus Cars Ltd software products to print out or copy this document or portions thereof solely for internal use in connection with the licensed software. No part of this document may be copied for any other purpose or distributed or translated into any other language without the prior written permission of Lotus Cars Ltd. ©2015 by Lotus Cars Ltd. All rights reserved. CONTENTS 1 - INTRODUCING LOTUS SUSPENSION ANALYSIS 1.1 Overview ..................................................................................1 1.2 What is Lotus Suspension Analysis? .......................................2 1.3 Normal Uses of Lotus Suspension Analysis.............................2 1.4 Overall Concepts......................................................................2 1.5 Coordinate system ...................................................................3 1.6 Default Sign convention ...........................................................3 1.7 About the Tutorials ...................................................................4 2 - GETTING STARTED -
High Precision Rack and Pinion Main Features High Precision High Loading High Speed Low Noise Long Life-Time Quick Delivery
High Precision Rack and Pinion Main Features High Precision High Loading High Speed Low Noise Long Life-Time Quick Delivery APEX is the ONLY ONE manufacturer worldwide who produces rack strictly according to specifications regarding : Geometrical Tolerance of all Dimensions Defined Straightness, Parallelism and Perpendicularity Helical Angle and Pressure Angle with Tolerance Defined Surface Roughness of Teeth Defined Hardness and Thickness of the Hardened Layer on the Teeth. APEX is also the ONLY ONE of the world leading brands who designs and produces rack, pinion and gearbox by its own, and provides well coordinated high-quality transmission sets to fulfill different industrial requirements. 1 Content Requirement of High-Precision Rack Page 3 Declaration of Tolerance 7 Induction Hardening for Rack 11 Heat-Treatment for Pinion 12 Rack Quality and Application 13 Rack Order Code 14 Rack with Helical Teeth 15 Rack with Helical Teeth ( with Linear-Guide Interface, 90° Type ) 27 Rack with Helical Teeth ( with Linear-Guide Interface, 180° Type ) 28 APEX High Precision Pinion 29 APEX Pinion with Curvic Plate 30 Pinion Order Code 31 Pinion with Helical Teeth ( Curvic Plate / EN ISO 9409-1-A ) 32 Pinion with Helical Teeth ( Welded Plate / EN ISO 9409-1-A ) 37 Pinion with Helical Teeth ( Teeth Plate / EN ISO 9409-1-A ) 43 Pinion with Helical Teeth ( DIN 5480 / Spline ) 48 Pinion with Helical Teeth ( Keyway for APEX AF- / PII-Series ) 50 Pinion with Helical Teeth ( Keyway ) 52 Pinion with Helical Teeth ( Long Shaft with Keyway for Hollow-Shaft )