A Treatment of Differential Signaling and Its Design Requirements
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Modeling System Signal Integrity Uncertainty Considerations
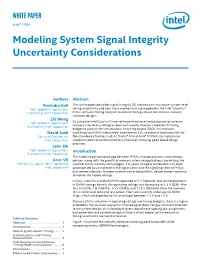
WHITE PAPER Intel® FPGA Modeling System Signal Integrity Uncertainty Considerations Authors Abstract Ravindra Gali This white paper describes signal integrity (SI) mechanisms that cause system-level High-Speed I/O Applications timing uncertainty and how these mechanisms are modeled in the Intel® Quartus® Engineering, Intel® Corporation Prime software Timing Analyzer to achieve timing closure for external memory interface designs. Zhi Wong By using the Intel Quartus Prime software to achieve timing closure for external High-Speed I/O Applications memory interfaces, a designer does not need to allocate a separate SI timing Engineering, Intel Corporation budget to account for simultaneous switching output (SSO), simultaneous Navid Azizi switching input (SSI), intersymbol interference (ISI), and board-level crosstalk for Software Engineeringr flip-chip device families such as Stratix® IV and Arria® II FPGAs for typical user Intel Corporation implementation of external memory interfaces following good board design practices. John Oh High-Speed I/O Applications Introduction Engineering, Intel Corporation The widening performance gap between FPGAs, microprocessors, and memory Arun VR devices, along with the growth of memory-intensive applications, are driving the Memory I/O Applications Engineering, need for faster memory technologies. This push to higher bandwidths has been Intel Corporation accompanied by an increase in the signal count and the signaling rates of FPGAs and memory devices. In order to attain faster bandwidths, device makers continue to reduce the supply voltage. Initially, industry-standard DIMMs operated at 5 V. However, due to improvements in DRAM storage density, the operating voltage was decreased to 3.3 V (SDR), then to 2.5V (DDR), 1.8 V (DDR2), 1.5 V (DDR3), and 1.35 V (DDR3) to allow the memory to run faster and consume less power. -

RS-485: Still the Most Robust Communication Table of Contents
TUTORIAL RS-485: Still the Most Robust Communication Table of Contents Abstract...........................................................................................................................1 RS-485 vs. RS-422..............................................................................................................................2 An In-Depth Look at RS-485...........................................................................................................3 Challenges of the Industrial Environment.....................................................................................5 Protecting Systems from Harsh Environments.........................................................................5 Conclusion......................................................................................................................10 References......................................................................................................................10 Abstract Despite the rise in popularity of wireless networks, wired serial networks continue to provide the most robust, reliable communication, especially in harsh environments. These well-engineered networks provide effective communication in industrial and building automation applications, which require immunity from noise, electrostatic discharge and voltage faults, all resulting in increased uptime. This tutorial reviews the RS-485 protocol and discusses why it is widely used in industrial applications and the common problems it solves. www.maximintegrated.com -
HD3SS214 8.1Gbps Displayport 1.4 2:1/1:2
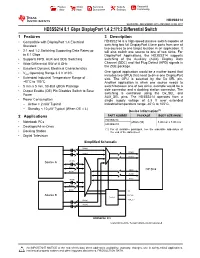
Product Order Technical Tools & Support & Folder Now Documents Software Community HD3SS214 SLAS907B –DECEMBER 2015–REVISED JUNE 2017 HD3SS214 8.1 Gbps DisplayPort 1.4 2:1/1:2 Differential Switch 1 Features 3 Description HD3SS214 is a high-speed passive switch capable of 1• Compatible with DisplayPort 1.4 Electrical Standard switching two full DisplayPort 4 lane ports from one of two sources to one target location in an application. It • 2:1 and 1:2 Switching Supporting Data Rates up will also switch one source to one of two sinks. For to 8.1 Gbps DisplayPort Applications, the HD3SS214 supports • Supports HPD, AUX and DDC Switching switching of the Auxiliary (AUX), Display Data • Wide Differential BW of 8 GHz Channel (DDC) and Hot Plug Detect (HPD) signals in the ZQE package. • Excellent Dynamic Electrical Characteristics • V Operating Range 3.3 V ±10% One typical application would be a mother board that DD includes two GPUs that need to drive one DisplayPort • Extended Industrial Temperature Range of sink. The GPU is selected by the Dx_SEL pin. -40°C to 105°C Another application is when one source needs to • 5 mm x 5 mm, 50-Ball ųBGA Package switch between one of two sinks, example would be a • Output Enable (OE) Pin Disables Switch to Save side connector and a docking station connector. The Power switching is controlled using the Dx_SEL and AUX_SEL pins. The HD3SS214 operates from a • Power Consumption single supply voltage of 3.3 V over extended – Active < 2 mW Typical industrial temperature range -40°C to 105°C. -

Displayport to TMDS Level Shifting Re-Driver Check for Samples: SN75DP139
SN75DP139 www.ti.com SLLS977D –APRIL 2009–REVISED JULY 2013 DisplayPort to TMDS Level Shifting Re-driver Check for Samples: SN75DP139 1FEATURES • DisplayPort Physical Layer Input Port to TMDS • Enhanced ESD: 10kV on All Pins Physical Layer Output Port • Enhanced Commercial Temperature Range: • Integrated TMDS Level Shifting Re-driver With 0°C to 85°C Receiver Equalization • 48 Pin 7 × 7 QFN (RGZ) Package • Supports Data Rates up to 3.4Gbps • 40 Pin 5 x 5 QFN (RSB) Package • Achieves HDMI 1.4b Compliance • 3D HDMI Support With TMDS Clock Rates up APPLICATIONS to 340MHz • Personal Computer Market • 4k x 2k Operation (30Hz, 24bpp) – DP/TMDS Dongle • Deep Color Supporting 36bpp – Desktop PC • Integrated I2C Logic Block for DVI/HDMI – Notebook PC Connector Recognition – Docking Station 2 • Integrated Active I C Buffer – Standalone Video Card DESCRIPTION The SN75DP139 is a Dual-Mode DisplayPort input to Transition-Minimized Differential Signaling (TMDS) output. The TMDS output has a built in level shifting re-driver supporting Digital Video Interface (DVI) 1.0 and High Definition Multimedia Interface (HDMI) 1.4b standards. The SN75DP139 is specified up to a maximum data rate of 3.4Gbps, supporting resolutions greater then 1920x1200 or HDTV 12 bit color depth at 1080p (progressive scan). SN75DP139 is compliant with the HDMI 1.4b specifications and supports optional protocol enhancements such as 3D graphics at resolutions demanding a pixel rate up to 340MHz. An integrated Active I2C buffer isolates the capacitive loading of the source system from that of the sink and interconnecting cable. This isolation improves overall signal integrity of the system and allows for considerable design margin within the source system for DVI / HDMI compliance testing. -
The Printed Circuit Designer's Guide To... Signal Integrity by Example
PEER REVIEWERS This book has been reviewed for technical accuracy by the following experts from the PCB industry. Happy Holden Consulting Technical Editor, I-Connect007 Happy Holden is the retired director of electronics and innovations for Gentex Corporation. Happy is the former chief technical officer for the world’s largest PCB fabricator, Hon Hai Precision Industries (Foxconn). Prior to Foxconn, Holden was the senior PCB technologist for Mentor Graphics and advanced technology manager at Nan Ya/ Westwood Associates and Merix. Happy previously worked at Hewlett-Packard for over 28 years as director of PCB R&D and manufacturing engineering manager. He has been involved in advanced PCB technologies for over 47 years. Eric Bogatin Eric Bogatin is currently the dean of the Teledyne LeCroy Signal Integrity Academy. Additionally, he is an adjunct professor at the University of Colorado- Boulder in the ECEE department, where he teaches a graduate class in signal integrity and is also the editor of Signal Integrity Journal. Bogatin received his BS in physics from MIT, and MS and PhD in physics from the University of Arizona in Tucson. Eric has held senior engineering and management positions at Bell Labs, Raychem, Sun Microsystems, Ansoft and Interconnect Devices. Bogatin has written six technical books in the field, and presented classes and lectures on signal integrity worldwide. MEET THE AUTHOR Fadi Deek Signal/Power Integrity Specialist Corporate Application Engineer In 2005, Fadi received his B.S. degree in computer and communications from the American University of Science and Technology (AUST) in Beirut, Lebanon. That same year, he joined Fidus Systems as a design engineer. -
LVDS Application and Data Handbook
LVDS Application and Data Handbook High-Performance Linear Products Technical Staff Literature Number: SLLD009 November 2002 Printed on Recycled Paper IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed. TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third–party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. -

Serial ATA Interface
Serial ATA Interface Frank R. Chu Senior Engineer Hitachi Global Storage Technologies June 2003 Why do we need a new interface? Limitations of parallel ATA Serial ATA was designed to overcome a number of limitations of parallel ATA. The most significant limitation of parallel ATA is the difficulty in increasing the data rate beyond 100MB/s. Parallel ATA uses a single-ended signaling system that is prone to induced noise. Increasing the parallel data rate beyond 100 MB/s would require a new signaling system that would not be backward compatible with existing systems. Desktop HDDs can be expected to outrun the 100 Mbytes/sec data rate in the next few years so a new system is needed. An additional limitation is that parallel ATA uses 5V signaling levels and upcoming silicon microelectronic processes are not compatible with 5V signaling. Serial ATA overcomes these issues by moving to 250mV differential signaling method. Differential signaling rejects induced noise. The 250mV differential signal level is compatible with future microelectronic fabrication processes. Parallel ATA Topology Serial ATA Topology Parallel ATA Topology Serial ATA Topology Operating system Operating System Serial ATA ATA Application 1 Application 1 Standard Adapter adapter Disk Driver Application 2 Driver Application 2 Drive Disk Application 3 Disk Disk Application 3 Drive drive drive Forecasts Indicate ATA Dominance ATA is the dominant HDD interface in the industry. The ATA interface market is expected to be approximately 190 million units in 2003, accounting for about 90% of all HDDs shipped, according to International Data Corporations (IDC) 2002/03 forecasts. By 2006, IDC projects ATA unit shipments will increase to beyond 310 million and continue to account for 90% of all HDDs shipments. -

High Speed Signal Integrity Analysis and Differential Signaling
High Speed Signal Integrity Analysis and Differential Signaling Project Report of EE201C: Modeling of VLSI Circuits and Systems Tongtong Yu, UID: 904025158 Zhiyuan Shen, UID: 803987916 Abstract— This course project is designated for independent electric mechanism of semiconductor circuit doesn’t change study of various topics relating to VLSI modeling. In our very much, so the concentration is on the interconnects and project, the first part is an extension of the class presentation packaging. where we introduced the basic idea of signal integrity. Here we address the philosophy behind frequency domain and time The impact of to the system can be classified to signal domain. Then, we give two examples of interconnects, a critical integrity, which refers to the contamination of signal’s in- issue related to signal integrity. The second part is about tegrity due to parasitic effects of interconnects and packaging, differential signaling used in high speed application. After compared with ideal case. This may result in unsatisfactory analyzing general principles, we simulate two parallel-trace performance. For example, we design the systems for 10Gbps; transmission line, which has practical meaning in real design case. Maybe this project is not fancy, but we believe all the however, due to this effect, it can only achieve 5Gbps. Also, fundamentals provided here and those reference list in the end this may produce inaccurate logic state and even logical are the best material for everyone who wants to go further in failure. This impact can be classified in two ways this area. 1) Delay, distortion and cross-talk directly happening on We would like to express our deepest gratitude to Prof. -
FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection
FUSB1500 / FUSB1501 — USB2.0 Full-Speed April 2011 FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection Features Description . Complies with USB2.0 Specification The FUSB1500 is a USB2.0 FS/LS transceiver with resistive charger detection. It is compliant with the . Supports 12Mbps and 1.5Mbps USB2.0 Speeds Universal Serial Bus Specification, Rev. 2.0 (USB2.0). - Single Ended (SE) Mode Signaling Ideal for portable electronic devices; such as mobile - Slew-Rate Controlled Differential Data Driver phones, digital still cameras, and personal digital - Differential Input Receiver with Wide Common- assistants; it allows USB Application Specific ICs Mode Range and High Input Sensitivity (ASICs) and Programmable Logic Devices (PLDs) with Low-Speed Transceiver with Charger Detection - Stable RCV Output during SE0 Condition power supply voltages from 1.65V to 3.6V to interface with the physical layer of the Universal Serial Bus. - Two Single-Ended Receivers with Hysteresis The FUSB1500 can be used as a USB device Supports I/O Voltage: 1.65V to 3.6V . transceiver or a USB host transceiver. It can transmit and receive serial data at both full-speed (12Mbps) and Applications low-speed (1.5Mbps) data rates. The FUSB1500 supports the SE Mode controller . Dual-Camera Applications for Cell Phones interface. Dual-LCD Applications for Cell Phones, Digital Camera Displays, and Viewfinders IMPORTANT NOTE: For additional performance information, please contact [email protected]. Ordering Information Operating Top Packing Part Number Temperature Package Mark Method Range FUSB 16-Pin, Molded Leadless Package (MLP), FUSB1500MHX -40 to +85°C Tape and Reel 1500 JEDEC MO217 Equivalent, 3mm Square © 2008 Fairchild Semiconductor Corporation www.fairchildsemi.com FUSB1500 • Rev. -
Ground-Referenced Signaling for Intra-Chip and Short-Reach Chip-To-Chip Interconnects
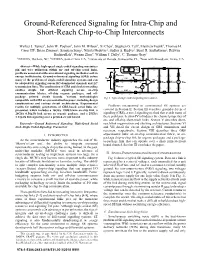
Ground-Referenced Signaling for Intra-Chip and Short-Reach Chip-to-Chip Interconnects Walker J. Turner1, John W. Poulton1, John M. Wilson1, Xi Chen2, Stephen G. Tell1, Matthew Fojtik1, Thomas H. Greer III1, Brian Zimmer2, Sanquan Song2, Nikola Nedovic2, Sudhir S. Kudva2, Sunil R. Sudhakaran2, Rizwan Bashirullah3, Wenxu Zhao4, William J. Dally2, C. Thomas Gray1 1NVIDIA, Durham, NC, 2NVIDIA, Santa Clara, CA, 3University of Florida, Gainesville, FL, 4Now with Broadcom, Irvine, CA Abstract—While high-speed single-ended signaling maximizes VDD pin and wire utilization within on- and off-chip serial links, VREF problems associated with conventional signaling methods result in R R energy inefficiencies. Ground-referenced signaling (GRS) solves DRIVE+ TERM TXDAT LINE many of the problems of single-ended signaling systems and can + RXDAT C CEXT + V be adapted for signaling across RC-dominated channels and LC - INT - DD RDRIVE- + transmission lines. The combination of GRS and clock forwarding VREF - enables simple but efficient signaling across on-chip GND communication fabrics, off-chip organic packages, and off- package printed circuit boards. Various methodologies Fig. 1. Typical single-ended signaling interconnect. compatible with GRS are presented in this paper, including design considerations and various circuit architectures. Experimental results for multiple generations of GRS-based serial links are Problems encountered in conventional SE systems are presented, which includes a 16Gb/s 170fJ/b/mm on-chip link, a covered in Section II. Section III describes ground-referenced 20Gb/s 0.58pJ/b link across an organic package, and a 25Gb/s signaling (GRS), a novel signaling method that avoids many of 1.17pJ/b link signaling over a printed-circuit board. -

Signal Integrity Analysis and Simulation Tools Include IBIS Models
High Frequency Products From September 2004 High Frequency Electronics Copyright ® 2004 Summit Technical Media, LLC HIGH-SPEED MODELS Signal Integrity Analysis and Simulation Tools Include IBIS Models By John Olah and Sanjeev Gupta, Agilent EEsof EDA, and Carlos Chavez-Dagostino, Altera Corporation ignal integrity is a several hybrid-domain simulation techniques, This issue’s cover highlights major concern for where the simulator is conversant in both the introduction of Agilent Sengineers working time and frequency domain and can combine Technologies’ ADS2004A, on high data rate designs. models suitable for either domain. This article which now includes Effects such as crosstalk, describes the types of models that need to be greatly enhanced capa- coupling and delays in taken together for high-speed signal integrity bilities for signal integrity transmission lines have a analysis, and illustrates their use in a simula- modeling in both time big impact on signal tion of a high-speed memory circuit. and frequency domains integrity. High-speed dig- ital board designers can Requirements for High-Speed now use design tools that combine time- Signal Integrity Simulations domain IC-specific I/O Buffer Information In broad terms, there are three important Specification (IBIS) models with accurate simulation requirements for analog high- transmission line models to get a better speed signal integrity characterization: understanding of the signal distortion due to coupling and delays. 1. A hybrid-domain simulator that handles time-domain and frequency-domain models Introduction 2. Accurate transmission line structures (best In terms of analog simulators, historically, described in the frequency-domain) there have been two main camps; time- 3. -

LVDS Owner's Manual
LVDS Owner’s Manual Including High-Speed CML and Signal Conditioning High-Speed Interface Technologies Overview 9-13 Network Topology 15-17 SerDes Architectures 19-29 Termination and Translation 31-38 Design and Layout Guidelines 39-45 Jitter Overview 47-58 Interconnect Media and Signal Conditioning 59-75 I/O Models 77-82 Solutions for Design Challenges 83-101 www.ti.com/LVDS 2008 2 LVDS Owner’s Manual Including High-Speed CML and Signal Conditioning Fourth Edition 2008 www.ti.com/LVDS 3 Contents Introduction ..........................................................................7 Design and Layout Guidelines ........................................39 5.1 PCB Transmission Lines ......................................................39 High-Speed Interface Technologies Overview..............9 5.2 Transmission Loss ................................................................40 1.1 Differential Signaling Technology .......................................9 5.3 PCB Vias .................................................................................41 1.2 LVDS – Low-Voltage Differential Signaling .....................10 5.4 Backplane Subsystem .........................................................42 1.3 CML – Current-Mode Logic .................................................11 5.5 Decoupling .............................................................................44 1.4 Low-Voltage Positive-Emitter-Coupled Logic .................12 1.5 Selecting An Optimal Technology .....................................12 Jitter Overview ..................................................................47