Signals Embedded in the Radial Velocity Noise\*
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Correlations Between the Stellar, Planetary, and Debris Components of Exoplanet Systems Observed by Herschel⋆
A&A 565, A15 (2014) Astronomy DOI: 10.1051/0004-6361/201323058 & c ESO 2014 Astrophysics Correlations between the stellar, planetary, and debris components of exoplanet systems observed by Herschel J. P. Marshall1,2, A. Moro-Martín3,4, C. Eiroa1, G. Kennedy5,A.Mora6, B. Sibthorpe7, J.-F. Lestrade8, J. Maldonado1,9, J. Sanz-Forcada10,M.C.Wyatt5,B.Matthews11,12,J.Horner2,13,14, B. Montesinos10,G.Bryden15, C. del Burgo16,J.S.Greaves17,R.J.Ivison18,19, G. Meeus1, G. Olofsson20, G. L. Pilbratt21, and G. J. White22,23 (Affiliations can be found after the references) Received 15 November 2013 / Accepted 6 March 2014 ABSTRACT Context. Stars form surrounded by gas- and dust-rich protoplanetary discs. Generally, these discs dissipate over a few (3–10) Myr, leaving a faint tenuous debris disc composed of second-generation dust produced by the attrition of larger bodies formed in the protoplanetary disc. Giant planets detected in radial velocity and transit surveys of main-sequence stars also form within the protoplanetary disc, whilst super-Earths now detectable may form once the gas has dissipated. Our own solar system, with its eight planets and two debris belts, is a prime example of an end state of this process. Aims. The Herschel DEBRIS, DUNES, and GT programmes observed 37 exoplanet host stars within 25 pc at 70, 100, and 160 μm with the sensitiv- ity to detect far-infrared excess emission at flux density levels only an order of magnitude greater than that of the solar system’s Edgeworth-Kuiper belt. Here we present an analysis of that sample, using it to more accurately determine the (possible) level of dust emission from these exoplanet host stars and thereafter determine the links between the various components of these exoplanetary systems through statistical analysis. -

The HARPS Search for Earth-Like Planets in the Habitable Zone I
A&A 534, A58 (2011) Astronomy DOI: 10.1051/0004-6361/201117055 & c ESO 2011 Astrophysics The HARPS search for Earth-like planets in the habitable zone I. Very low-mass planets around HD 20794, HD 85512, and HD 192310, F. Pepe1,C.Lovis1, D. Ségransan1,W.Benz2, F. Bouchy3,4, X. Dumusque1, M. Mayor1,D.Queloz1, N. C. Santos5,6,andS.Udry1 1 Observatoire de Genève, Université de Genève, 51 ch. des Maillettes, 1290 Versoix, Switzerland e-mail: [email protected] 2 Physikalisches Institut Universität Bern, Sidlerstrasse 5, 3012 Bern, Switzerland 3 Institut d’Astrophysique de Paris, UMR7095 CNRS, Université Pierre & Marie Curie, 98bis Bd Arago, 75014 Paris, France 4 Observatoire de Haute-Provence/CNRS, 04870 St. Michel l’Observatoire, France 5 Centro de Astrofísica da Universidade do Porto, Rua das Estrelas, 4150-762 Porto, Portugal 6 Departamento de Física e Astronomia, Faculdade de Ciências, Universidade do Porto, Portugal Received 8 April 2011 / Accepted 15 August 2011 ABSTRACT Context. In 2009 we started an intense radial-velocity monitoring of a few nearby, slowly-rotating and quiet solar-type stars within the dedicated HARPS-Upgrade GTO program. Aims. The goal of this campaign is to gather very-precise radial-velocity data with high cadence and continuity to detect tiny signatures of very-low-mass stars that are potentially present in the habitable zone of their parent stars. Methods. Ten stars were selected among the most stable stars of the original HARPS high-precision program that are uniformly spread in hour angle, such that three to four of them are observable at any time of the year. -
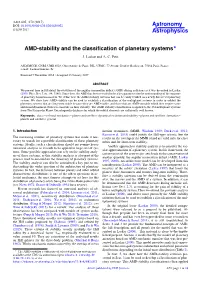
AMD-Stability and the Classification of Planetary Systems
A&A 605, A72 (2017) DOI: 10.1051/0004-6361/201630022 Astronomy c ESO 2017 Astrophysics& AMD-stability and the classification of planetary systems? J. Laskar and A. C. Petit ASD/IMCCE, CNRS-UMR 8028, Observatoire de Paris, PSL, UPMC, 77 Avenue Denfert-Rochereau, 75014 Paris, France e-mail: [email protected] Received 7 November 2016 / Accepted 23 January 2017 ABSTRACT We present here in full detail the evolution of the angular momentum deficit (AMD) during collisions as it was described in Laskar (2000, Phys. Rev. Lett., 84, 3240). Since then, the AMD has been revealed to be a key parameter for the understanding of the outcome of planetary formation models. We define here the AMD-stability criterion that can be easily verified on a newly discovered planetary system. We show how AMD-stability can be used to establish a classification of the multiplanet systems in order to exhibit the planetary systems that are long-term stable because they are AMD-stable, and those that are AMD-unstable which then require some additional dynamical studies to conclude on their stability. The AMD-stability classification is applied to the 131 multiplanet systems from The Extrasolar Planet Encyclopaedia database for which the orbital elements are sufficiently well known. Key words. chaos – celestial mechanics – planets and satellites: dynamical evolution and stability – planets and satellites: formation – planets and satellites: general 1. Introduction motion resonances (MMR, Wisdom 1980; Deck et al. 2013; Ramos et al. 2015) could justify the Hill-type criteria, but the The increasing number of planetary systems has made it nec- results on the overlap of the MMR island are valid only for close essary to search for a possible classification of these planetary orbits and for short-term stability. -

The Hd 40307 Planetary System: Super-Earths Or Mini-Neptunes?
The Astrophysical Journal, 695:1006–1011, 2009 April 20 doi:10.1088/0004-637X/695/2/1006 C 2009. The American Astronomical Society. All rights reserved. Printed in the U.S.A. THE HD 40307 PLANETARY SYSTEM: SUPER-EARTHS OR MINI-NEPTUNES? Rory Barnes1, Brian Jackson1, Sean N. Raymond2,4, Andrew A. West3, and Richard Greenberg1 1 Lunar and Planetary Laboratory, University of Arizona, Tucson, AZ 85721, USA 2 Center for Astrophysics and Space Astronomy, University of Colorado, Boulder, CO 80309, USA 3 Astronomy Department, University of California, 601 Campbell Hall, Berkeley, CA 94720-3411, USA Received 2008 July 9; accepted 2009 January 15; published 2009 April 6 ABSTRACT Three planets with minimum masses less than 10 M⊕ orbit the star HD 40307, suggesting these planets may be rocky. However, with only radial velocity data, it is impossible to determine if these planets are rocky or gaseous. Here we exploit various dynamical features of the system in order to assess the physical properties of the planets. Observations allow for circular orbits, but a numerical integration shows that the eccentricities must be at least 10−4. Also, planets b and c are so close to the star that tidal effects are significant. If planet b has tidal parameters similar to the terrestrial planets in the solar system and a remnant eccentricity larger than 10−3, then, going back in time, the system would have been unstable within the lifetime of the star (which we estimate to be 6.1 ± 1.6 Gyr). Moreover, if the eccentricities are that large and the inner planet is rocky, then its tidal heating may be an order of magnitude greater than extremely volcanic Io, on a per unit surface area basis. -

The HARPS Search for Southern Extra-Solar Planets�,
A&A 493, 639–644 (2009) Astronomy DOI: 10.1051/0004-6361:200810451 & c ESO 2009 Astrophysics The HARPS search for southern extra-solar planets, XIII. A planetary system with 3 super-Earths (4.2, 6.9, and 9.2 M⊕) M. Mayor1,S.Udry1,C.Lovis1,F.Pepe1,D.Queloz1,W.Benz2, J.-L. Bertaux3, F. Bouchy4, C. Mordasini2, and D. Segransan1 1 Observatoire de Genève, Université de Genève, 51 Ch. des Maillettes, 1290 Sauverny, Switzerland e-mail: [email protected] 2 Physikalisches Institut, Universität Bern, Silderstrasse 5, 3012 Bern, Switzerland 3 Service d’Aéronomie du CNRS/IPSL, Université de Versailles Saint-Quentin, BP 3, 91371 Verrières-le-Buisson, France 4 Institut d’Astrophysique de Paris, CNRS, Université Pierre et Marie Curie, 98bis Bd Arago, 75014 Paris, France Received 23 June 2008 / Accepted 1 August 2008 ABSTRACT We report the detection of a planetary system with three Super-Earths orbiting HD 40307. HD 40307 is a K2 V metal-deficient star at a distance of only 13 parsec, which is part of the HARPS GTO high-precision planet-search programme. The three planets on circular orbits have very low minimum masses of 4.2, 6.9, and 9.2 Earth masses and periods of 4.3, 9.6, and 20.5 days, respectively. The planet with the shortest period is the lowest mass planet detected to-date orbiting a main sequence star. The detection of the correspondingly low amplitudes of the induced radial-velocity variations is secured completely by the 135 high-quality HARPS observations illustrated by the radial-velocity residuals around the 3-Keplerian solution of only 0.85 ms−1. -
Analysis of Exoplanetary Transit Light Curves Joshua Adam Carter
Analysis of Exoplanetary Transit Light Curves by Joshua Adam Carter B.S., Physics, University of North Carolina at Chapel Hill, 2004 B.S., Mathematics, University of North Carolina at Chapel Hill, 2004 Submitted to the Department of Physics in partial fulfillment of the requirements for the degree oft MASSACHUSETTS INSTITUTE Doctor of Philosophy at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY ARCHIVES September 2009 © Massachusetts Institute of Technology 2009. All rights reserved. Author ................ .............. Department of Physics 31, 2009 7A .August Certified by....... Joshua N. Winn Assistant Professor of Physics Class of 1942 Career Development Professor Thesis Supervisor A Accepted by ............................ TlW rs J. Greytak Lester Wolfe Professor of Physics Associate Department Head for Education Analysis of Exoplanetary Transit Light Curves by Joshua Adam Carter Submitted to the Department of Physics on August 31, 2009, in partial fulfillment of the requirements for the degree of Doctor of Philosophy Abstract This Thesis considers the scenario in which an extra-solar planet (exoplanet) passes in front of its star relative to our observing perspective. In this event, the light curve measured for the host star features a systematic drop in flux occurring once every orbital period as the exoplanet covers a portion of the stellar disk. This exoplanetary transit light curve provides a wealth of information about both the planet and star. In this Thesis we consider the transit light curve as a tool for characterizing the exoplanet. The Thesis can divided into two parts. In the first part, comprised of the second and third chapters, I assess what ob- servables describing the exoplanet (and host) may be measured, how well they can be measured, and what effect systematics in the light curve can have on our estimation of these parameters. -

Pricelist Abstraction (Jean-Marie Gitard (Mr STRANGE))
Artmajeur JEAN-MARIE GITARD (MR STRANGE) (FRANCE) ARTMAJEUR.COM/JEANMARIEGITARD Pricelist: Abstraction 22 Artworks Image Title Status Price Spirale For Sale $318.14 Digital Arts, 98x82x0.1 cm ©2020 Ref 13786553 artmajeur.link/l94q4U HERAKLION For Sale $365.45 Digital Arts, 75x100x0.1 cm ©2019 Ref 13659182 artmajeur.link/velV6l PHAEDRA 112 Ca For Sale $259.01 Digital Arts, 50x50x0.1 cm ©2020 Ref 13609553 artmajeur.link/zOOdl6 GLIESE 668 Cc Limited Edition For Sale $259.01 Digital Arts, 50x50x0.1 cm ©2018 Ref 13609547 artmajeur.link/tVScWB KOI-1686.01 For Sale $353.62 Digital Arts, 80x80x0.1 cm ©2018 Ref 12809219 artmajeur.link/lqEm9T 1 / 4 Image Title Status Price LHS 1723 b For Sale $353.62 Digital Arts, 100x75x0.1 cm ©2018 Ref 12809207 artmajeur.link/iEB3Ph Kepler-438 b For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2019 Ref 12300905 artmajeur.link/8D7uGT Luyten b For Sale $365.45 Digital Arts, 100x75x0.1 cm ©2019 Ref 12300896 artmajeur.link/wnZk2l Proxima Centauri b For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2017 Ref 12283532 artmajeur.link/Y8zZkd Gliese 667 Cc For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2018 Ref 12283529 artmajeur.link/LMBNRI K2-72-e For Sale $353.62 Digital Arts, 96x80x0.1 cm ©2018 Ref 12283526 artmajeur.link/FZDM29 2 / 4 Image Title Status Price TRAPPIST-1d For Sale $353.62 Digital Arts, 100x75x0.1 cm ©2018 Ref 12274691 artmajeur.link/xSVnNP Tau Ceti e For Sale $353.62 Digital Arts, 75x100x0.1 cm ©2017 Ref 12274649 artmajeur.link/DbFvHV KOI-3010.01 For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2019 Ref 12274613 artmajeur.link/pGjEoY -

The Hunt for Sara Seager Astronomers Are fi Nding and Studying Worlds Just a Little Larger Than Ours
Closing in on Life-Bearing Planets Super-EarthsThe Hunt for sara seager Astronomers are fi nding and studying worlds just a little larger than ours. For thousands of years people What’s a Super-Earth? Super-Earths are unoffi cially defi ned as planets with have wondered if we are alone. masses between about 1 and 10 Earth masses. The term is largely reserved for planets that are rocky in nature rather Modern astronomers pose the than for planets that have icy interiors or signifi cant gas envelopes. Astronomers refer to the latter as exo-Nep- question in a slightly diff erent tunes. Because super-Earths and exo-Neptunes may be continuous and have an overlapping mass range, they are way, a way that can be answered often discussed together. Super-Earths are fascinating because they have no quantitatively, in stages, in the solar-system counterparts, because they represent our nearest-term hope for fi nding habitable planets, and near future: Are there planets because they should display a huge diversity of properties. The wide and almost continuous spread of giant exo- like Earth? Are they common? planet masses and orbits illustrates the random nature of planet formation and migration; this trend surely extends Do any of them have signs of to super-Earths as well. Indeed, even though about two dozen are known so far, their range of masses and orbits life? The hunt for life-sustain- supports this notion. Current detection methods are biased toward fi nding close-in super-Earths, so there’s ing exoplanets is accelerating as undoubtedly a huge population waiting to be discovered. -

On the Probability of Habitable Planets
On the probability of habitable planets. François Forget LMD, Institut Pierre Simon Laplace, CNRS, UPMC, Paris, France E-mail : [email protected] Published in “International Journal of Astrobiology” doi:10.1017/S1473550413000128, Cambridge University Press 2013. Abstract In the past 15 years, astronomers have revealed that a significant fraction of the stars should harbor planets and that it is likely that terrestrial planets are abundant in our galaxy. Among these planets, how many are habitable, i.e. suitable for life and its evolution? These questions have been discussed for years and we are slowly making progress. Liquid water remains the key criterion for habitability. It can exist in the interior of a variety of planetary bodies, but it is usually assumed that liquid water at the surface interacting with rocks and light is necessary for the emergence of a life able to modify its environment and evolve. A first key issue is thus to understand the climatic conditions allowing surface liquid water assuming a suitable atmosphere. This have been studied with global mean 1D models which has defined the “classical habitable zone”, the range of orbital distances within which worlds can maintain liquid water on their surfaces (Kasting et al. 1993). A new generation of 3D climate models based on universal equations and tested on bodies in the solar system is now available to explore with accuracy climate regimes that could locally allow liquid water. A second key issue is now to better understand the processes which control the composition and the evolution of the atmospheres of exoplanets, and in particular the geophysical feedbacks that seems to be necessary to maintain a continuously habitable climate. -
![Arxiv:2010.15164V2 [Astro-Ph.EP] 19 Nov 2020](https://docslib.b-cdn.net/cover/7854/arxiv-2010-15164v2-astro-ph-ep-19-nov-2020-3047854.webp)
Arxiv:2010.15164V2 [Astro-Ph.EP] 19 Nov 2020
Draft version November 20, 2020 Typeset using LATEX twocolumn style in AASTeX63 Science Extraction from TESS Observations of Known Exoplanet Hosts Stephen R. Kane,1 Jacob L. Bean,2 Tiago L. Campante,3,4 Paul A. Dalba,1, ∗ Tara Fetherolf,1 Teo Mocnik,5 Colby Ostberg,1 Joshua Pepper,6 Emilie R. Simpson,1 Margaret C. Turnbull,7 George R. Ricker,8 Roland Vanderspek,8 David W. Latham,9 Sara Seager,8,10,11 Joshua N. Winn,12 Jon M. Jenkins,13 Daniel Huber,14 and William J. Chaplin15, 16 1Department of Earth and Planetary Sciences, University of California, Riverside, CA 92521, USA 2Department of Astronomy & Astrophysics, University of Chicago, 5640 South Ellis Avenue, Chicago, IL 60637, USA 3Instituto de Astrof´ısica e Ciˆencias do Espa¸co, Universidade do Porto, Rua das Estrelas, 4150-762 Porto, Portugal 4Departamento de F´ısica e Astronomia, Faculdade de Ciˆencias da Universidade do Porto, Rua do Campo Alegre, s/n, 4169-007 Porto, Portugal 5Gemini Observatory, Northern Operations Center, 670 N. A’ohoku Place, Hilo, HI 96720, USA 6Department of Physics, Lehigh University, 16 Memorial Drive East, Bethlehem, PA 18015, USA 7SETI Institute, Carl Sagan Center for the Study of Life in the Universe, Off-Site: 2613 Waunona Way, Madison, WI 53713, USA 8Department of Physics and Kavli Institute for Astrophysics and Space Research, Massachusetts Institute of Technology, Cambridge, MA 02139, USA 9Center for Astrophysics | Harvard & Smithsonian, 60 Garden Street, Cambridge, MA 02138, USA 10Department of Earth, Atmospheric and Planetary Sciences, Massachusetts -

Determining the True Mass of Radial-Velocity Exoplanets with Gaia Nine Planet Candidates in the Brown Dwarf Or Stellar Regime and 27 Confirmed Planets? F
A&A 645, A7 (2021) Astronomy https://doi.org/10.1051/0004-6361/202039168 & © F. Kiefer et al. 2020 Astrophysics Determining the true mass of radial-velocity exoplanets with Gaia Nine planet candidates in the brown dwarf or stellar regime and 27 confirmed planets? F. Kiefer1,2, G. Hébrard1,3, A. Lecavelier des Etangs1, E. Martioli1,4, S. Dalal1, and A. Vidal-Madjar1 1 Institut d’Astrophysique de Paris, Sorbonne Université, CNRS, UMR 7095, 98 bis bd Arago, 75014 Paris, France e-mail: [email protected] 2 LESIA, Observatoire de Paris, Université PSL, CNRS, Sorbonne Université, Université de Paris, 5 place Jules Janssen, 92195 Meudon, France 3 Observatoire de Haute-Provence, CNRS, Université d’Aix-Marseille, 04870 Saint-Michel-l’Observatoire, France 4 Laboratório Nacional de Astrofísica, Rua Estados Unidos 154, 37504-364, Itajubá - MG, Brazil Received 12 August 2020 / Accepted 24 September 2020 ABSTRACT Mass is one of the most important parameters for determining the true nature of an astronomical object. Yet, many published exoplanets lack a measurement of their true mass, in particular those detected as a result of radial-velocity (RV) variations of their host star. For those examples, only the minimum mass, or m sin i, is known, owing to the insensitivity of RVs to the inclination of the detected orbit compared to the plane of the sky. The mass that is given in databases is generally that of an assumed edge-on system ( 90◦), but many ∼ other inclinations are possible, even extreme values closer to 0◦ (face-on). In such a case, the mass of the published object could be strongly underestimated by up to two orders of magnitude. -

The Universe Contents 3 HD 149026 B
History . 64 Antarctica . 136 Utopia Planitia . 209 Umbriel . 286 Comets . 338 In Popular Culture . 66 Great Barrier Reef . 138 Vastitas Borealis . 210 Oberon . 287 Borrelly . 340 The Amazon Rainforest . 140 Titania . 288 C/1861 G1 Thatcher . 341 Universe Mercury . 68 Ngorongoro Conservation Jupiter . 212 Shepherd Moons . 289 Churyamov- Orientation . 72 Area . 142 Orientation . 216 Gerasimenko . 342 Contents Magnetosphere . 73 Great Wall of China . 144 Atmosphere . .217 Neptune . 290 Hale-Bopp . 343 History . 74 History . 218 Orientation . 294 y Halle . 344 BepiColombo Mission . 76 The Moon . 146 Great Red Spot . 222 Magnetosphere . 295 Hartley 2 . 345 In Popular Culture . 77 Orientation . 150 Ring System . 224 History . 296 ONIS . 346 Caloris Planitia . 79 History . 152 Surface . 225 In Popular Culture . 299 ’Oumuamua . 347 In Popular Culture . 156 Shoemaker-Levy 9 . 348 Foreword . 6 Pantheon Fossae . 80 Clouds . 226 Surface/Atmosphere 301 Raditladi Basin . 81 Apollo 11 . 158 Oceans . 227 s Ring . 302 Swift-Tuttle . 349 Orbital Gateway . 160 Tempel 1 . 350 Introduction to the Rachmaninoff Crater . 82 Magnetosphere . 228 Proteus . 303 Universe . 8 Caloris Montes . 83 Lunar Eclipses . .161 Juno Mission . 230 Triton . 304 Tempel-Tuttle . 351 Scale of the Universe . 10 Sea of Tranquility . 163 Io . 232 Nereid . 306 Wild 2 . 352 Modern Observing Venus . 84 South Pole-Aitken Europa . 234 Other Moons . 308 Crater . 164 Methods . .12 Orientation . 88 Ganymede . 236 Oort Cloud . 353 Copernicus Crater . 165 Today’s Telescopes . 14. Atmosphere . 90 Callisto . 238 Non-Planetary Solar System Montes Apenninus . 166 How to Use This Book 16 History . 91 Objects . 310 Exoplanets . 354 Oceanus Procellarum .167 Naming Conventions . 18 In Popular Culture .