Real Effects of Pseudo-Forces!
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the History of the Radiation Reaction1 Kirk T
On the History of the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 6, 2017; updated March 18, 2020) 1 Introduction Apparently, Kepler considered the pointing of comets’ tails away from the Sun as evidence for radiation pressure of light [2].2 Following Newton’s third law (see p. 83 of [3]), one might suppose there to be a reaction of the comet back on the incident light. However, this theme lay largely dormant until Poincar´e (1891) [37, 41] and Planck (1896) [46] discussed the effect of “radiation damping” on an oscillating electric charge that emits electromagnetic radiation. Already in 1892, Lorentz [38] had considered the self force on an extended, accelerated charge e, finding that for low velocity v this force has the approximate form (in Gaussian units, where c is the speed of light in vacuum), independent of the radius of the charge, 3e2 d2v 2e2v¨ F = = . (v c). (1) self 3c3 dt2 3c3 Lorentz made no connection at the time between this force and radiation, which connection rather was first made by Planck [46], who considered that there should be a damping force on an accelerated charge in reaction to its radiation, and by a clever transformation arrived at a “radiation-damping” force identical to eq. (1). Today, Lorentz is often credited with identifying eq. (1) as the “radiation-reaction force”, and the contribution of Planck is seldom acknowledged. This note attempts to review the history of thoughts on the “radiation reaction”, which seems to be in conflict with the brief discussions in many papers and “textbooks”.3 2 What is “Radiation”? The “radiation reaction” would seem to be a reaction to “radiation”, but the concept of “radiation” is remarkably poorly defined in the literature. -

Relativity with a Preferred Frame. Astrophysical and Cosmological Implications Monday, 21 August 2017 15:30 (30 Minutes)
6th International Conference on New Frontiers in Physics (ICNFP2017) Contribution ID: 1095 Type: Talk Relativity with a preferred frame. Astrophysical and cosmological implications Monday, 21 August 2017 15:30 (30 minutes) The present analysis is motivated by the fact that, although the local Lorentz invariance is one of thecorner- stones of modern physics, cosmologically a preferred system of reference does exist. Modern cosmological models are based on the assumption that there exists a typical (privileged) Lorentz frame, in which the universe appear isotropic to “typical” freely falling observers. The discovery of the cosmic microwave background provided a stronger support to that assumption (it is tacitly assumed that the privileged frame, in which the universe appears isotropic, coincides with the CMB frame). The view, that there exists a preferred frame of reference, seems to unambiguously lead to the abolishmentof the basic principles of the special relativity theory: the principle of relativity and the principle of universality of the speed of light. Correspondingly, the modern versions of experimental tests of special relativity and the “test theories” of special relativity reject those principles and presume that a preferred inertial reference frame, identified with the CMB frame, is the only frame in which the two-way speed of light (the average speed from source to observer and back) is isotropic while it is anisotropic in relatively moving frames. In the present study, the existence of a preferred frame is incorporated into the framework of the special relativity, based on the relativity principle and universality of the (two-way) speed of light, at the expense of the freedom in assigning the one-way speeds of light that exists in special relativity. -

Frames of Reference
Galilean Relativity 1 m/s 3 m/s Q. What is the women velocity? A. With respect to whom? Frames of Reference: A frame of reference is a set of coordinates (for example x, y & z axes) with respect to whom any physical quantity can be determined. Inertial Frames of Reference: - The inertia of a body is the resistance of changing its state of motion. - Uniformly moving reference frames (e.g. those considered at 'rest' or moving with constant velocity in a straight line) are called inertial reference frames. - Special relativity deals only with physics viewed from inertial reference frames. - If we can neglect the effect of the earth’s rotations, a frame of reference fixed in the earth is an inertial reference frame. Galilean Coordinate Transformations: For simplicity: - Let coordinates in both references equal at (t = 0 ). - Use Cartesian coordinate systems. t1 = t2 = 0 t1 = t2 At ( t1 = t2 ) Galilean Coordinate Transformations are: x2= x 1 − vt 1 x1= x 2+ vt 2 or y2= y 1 y1= y 2 z2= z 1 z1= z 2 Recall v is constant, differentiation of above equations gives Galilean velocity Transformations: dx dx dx dx 2 =1 − v 1 =2 − v dt 2 dt 1 dt 1 dt 2 dy dy dy dy 2 = 1 1 = 2 dt dt dt dt 2 1 1 2 dz dz dz dz 2 = 1 1 = 2 and dt2 dt 1 dt 1 dt 2 or v x1= v x 2 + v v x2 =v x1 − v and Similarly, Galilean acceleration Transformations: a2= a 1 Physics before Relativity Classical physics was developed between about 1650 and 1900 based on: * Idealized mechanical models that can be subjected to mathematical analysis and tested against observation. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -
Power Sources Challenge
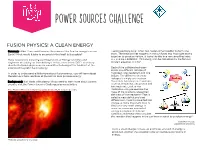
POWER SOURCES CHALLENGE FUSION PHYSICS! A CLEAN ENERGY Summary: What if we could harness the power of the Sun for energy here on Fusion reactions occur when two nuclei come together to form one Earth? What would it take to accomplish this feat? Is it possible? atom. The reaction that happens in the sun fuses two Hydrogen atoms together to produce Helium. It looks like this in a very simplified way: Many researchers including our Department of Energy scientists and H + H He + ENERGY. This energy can be calculated by the famous engineers are taking on this challenge! In fact, there is one DOE Laboratory Einstein equation, E = mc2. devoted to fusion physics and is committed to being at the forefront of the science of magnetic fusion energy. Each of the colliding hydrogen atoms is a different isotope of In order to understand a little more about fusion energy, you will learn about hydrogen, one deuterium and one the atom and how reactions at the atomic level produce energy. tritium. The difference in these isotopes is simply one neutron. Background: It all starts with plasma! If you need to learn more about plasma Deuterium has one proton and one physics, visit the Power Sources Challenge plasma activities. neutron, tritium has one proton and two neutrons. Look at the The Fusion Reaction that happens in the SUN looks like this: illustration—do you see how the mass of the products is less than the mass of the reactants? That is called a mass deficit and that difference in mass is converted into energy. -

PHYSICS of ARTIFICIAL GRAVITY Angie Bukley1, William Paloski,2 and Gilles Clément1,3
Chapter 2 PHYSICS OF ARTIFICIAL GRAVITY Angie Bukley1, William Paloski,2 and Gilles Clément1,3 1 Ohio University, Athens, Ohio, USA 2 NASA Johnson Space Center, Houston, Texas, USA 3 Centre National de la Recherche Scientifique, Toulouse, France This chapter discusses potential technologies for achieving artificial gravity in a space vehicle. We begin with a series of definitions and a general description of the rotational dynamics behind the forces ultimately exerted on the human body during centrifugation, such as gravity level, gravity gradient, and Coriolis force. Human factors considerations and comfort limits associated with a rotating environment are then discussed. Finally, engineering options for designing space vehicles with artificial gravity are presented. Figure 2-01. Artist's concept of one of NASA early (1962) concepts for a manned space station with artificial gravity: a self- inflating 22-m-diameter rotating hexagon. Photo courtesy of NASA. 1 ARTIFICIAL GRAVITY: WHAT IS IT? 1.1 Definition Artificial gravity is defined in this book as the simulation of gravitational forces aboard a space vehicle in free fall (in orbit) or in transit to another planet. Throughout this book, the term artificial gravity is reserved for a spinning spacecraft or a centrifuge within the spacecraft such that a gravity-like force results. One should understand that artificial gravity is not gravity at all. Rather, it is an inertial force that is indistinguishable from normal gravity experience on Earth in terms of its action on any mass. A centrifugal force proportional to the mass that is being accelerated centripetally in a rotating device is experienced rather than a gravitational pull. -

Physics 101 Today Chapter 5: Newton's Third
Physics 101 Today Chapter 5: Newton’s Third Law First, let’s clarify notion of a force : Previously defined force as a push or pull. Better to think of force as an interaction between two objects. You can’t push anything without it pushing back on you ! Whenever one object exerts a force on a second object, the second object exerts an equal and opposite force on the first. Newton’s 3 rd Law - often called “action-reaction ” Eg. Leaning against a wall. You push against the wall. The wall is also pushing on you, equally hard – normal/support force. Now place a piece of paper between the wall and hand. Push on it – it doesn’t accelerate must be zero net force. The wall is pushing equally as hard (normal force) on the paper in the opposite direction to your hand, resulting in zero Fnet . This is more evident when hold a balloon against the wall – it is squashed on both sides. Eg. You pull on a cart. It accelerates. The cart pulls back on you (you feel the rope get tighter). Can call your pull the “ action ” and cart’s pull the “ reaction ”. Or, the other way around. • Newton’s 3 rd law means that forces always come in action -reaction pairs . It doesn’t matter which is called the action and which is called the reaction. • Note: Action-reaction pairs never act on the same object Examples of action-reaction force pairs In fact it is the road’s push that makes the car go forward. Same when we walk – push back on floor, floor pushes us forward. -

HW 6, Question 1: Forces in a Rotating Frame
HW 6, Question 1: Forces in a Rotating Frame Consider a solid platform, like a \merry-go round", that rotates with respect to an inertial frame of reference. It is oriented in the xy plane such that the axis of rotation is in the z-direction, i.e. ! = !z^, which we can take to point out of the page. Now, let us also consider a person walking on the rotating platform, such that this person is walking radially outward on the platform with respect to their (non-inertial) reference frame with velocity v = vr^. In what follows for Question 1, directions in the non-inertial reference frame (i.e. the frame of the walking person) are defined in the following manner: the x0-direction points directly outward from the center of the merry-go round; the y0 points in the tangential direction of rotation in the plane of the platform; and the z0-direction points out of the page, and in the same direction as the z-direction for the inertial reference frame. (a) Identify all forces. Since the person's reference frame is non-inertial, we need to account for the various fictitious forces given the description above, as well as any other external/reaction forces. The angular rate of rotation is constant, and so the Euler force Feul = m(!_ × r) = ~0. The significant forces acting on the person are: 0 • the force due to gravity, Fg = mg = mg(−z^ ), 2 0 • the (fictitious) centrifugal force, Fcen = m! × (! × r) = m! rx^ , 0 • the (fictitious) Coriolis force, Fcor = 2mv × ! = 2m!v(−y^ ), • the normal force the person experiences from the rotating platform N = Nz^0, and • a friction force acting on the person, f, in the x0y0 plane. -
LECTURES 20 - 29 INTRODUCTION to CLASSICAL MECHANICS Prof
LECTURES 20 - 29 INTRODUCTION TO CLASSICAL MECHANICS Prof. N. Harnew University of Oxford HT 2017 1 OUTLINE : INTRODUCTION TO MECHANICS LECTURES 20-29 20.1 The hyperbolic orbit 20.2 Hyperbolic orbit : the distance of closest approach 20.3 Hyperbolic orbit: the angle of deflection, φ 20.3.1 Method 1 : using impulse 20.3.2 Method 2 : using hyperbola orbit parameters 20.4 Hyperbolic orbit : Rutherford scattering 21.1 NII for system of particles - translation motion 21.1.1 Kinetic energy and the CM 21.2 NII for system of particles - rotational motion 21.2.1 Angular momentum and the CM 21.3 Introduction to Moment of Inertia 21.3.1 Extend the example : J not parallel to ! 21.3.2 Moment of inertia : mass not distributed in a plane 21.3.3 Generalize for rigid bodies 22.1 Moment of inertia tensor 2 22.1.1 Rotation about a principal axis 22.2 Moment of inertia & energy of rotation 22.3 Calculation of moments of inertia 22.3.1 MoI of a thin rectangular plate 22.3.2 MoI of a thin disk perpendicular to plane of disk 22.3.3 MoI of a solid sphere 23.1 Parallel axis theorem 23.1.1 Example : compound pendulum 23.2 Perpendicular axis theorem 23.2.1 Perpendicular axis theorem : example 23.3 Example 1 : solid ball rolling down slope 23.4 Example 2 : where to hit a ball with a cricket bat 23.5 Example 3 : an aircraft landing 24.1 Lagrangian mechanics : Introduction 24.2 Introductory example : the energy method for the E of M 24.3 Becoming familiar with the jargon 24.3.1 Generalised coordinates 24.3.2 Degrees of Freedom 24.3.3 Constraints 3 24.3.4 Configuration -

The Experimental Verdict on Spacetime from Gravity Probe B
The Experimental Verdict on Spacetime from Gravity Probe B James Overduin Abstract Concepts of space and time have been closely connected with matter since the time of the ancient Greeks. The history of these ideas is briefly reviewed, focusing on the debate between “absolute” and “relational” views of space and time and their influence on Einstein’s theory of general relativity, as formulated in the language of four-dimensional spacetime by Minkowski in 1908. After a brief detour through Minkowski’s modern-day legacy in higher dimensions, an overview is given of the current experimental status of general relativity. Gravity Probe B is the first test of this theory to focus on spin, and the first to produce direct and unambiguous detections of the geodetic effect (warped spacetime tugs on a spin- ning gyroscope) and the frame-dragging effect (the spinning earth pulls spacetime around with it). These effects have important implications for astrophysics, cosmol- ogy and the origin of inertia. Philosophically, they might also be viewed as tests of the propositions that spacetime acts on matter (geodetic effect) and that matter acts back on spacetime (frame-dragging effect). 1 Space and Time Before Minkowski The Stoic philosopher Zeno of Elea, author of Zeno’s paradoxes (c. 490-430 BCE), is said to have held that space and time were unreal since they could neither act nor be acted upon by matter [1]. This is perhaps the earliest version of the relational view of space and time, a view whose philosophical fortunes have waxed and waned with the centuries, but which has exercised enormous influence on physics. -

Action Principle for Hydrodynamics and Thermodynamics, Including General, Rotational Flows
th December 15, 2014 Action Principle for Hydrodynamics and Thermodynamics, including general, rotational flows C. Fronsdal Depart. of Physics and Astronomy, University of California Los Angeles 90095-1547 USA ABSTRACT This paper presents an action principle for hydrodynamics and thermodynamics that includes general, rotational flows, thus responding to a challenge that is more that 100 years old. It has been lifted to the relativistic context and it can be used to provide a suitable source of rotating matter for Einstein’s equation, finally overcoming another challenge of long standing, the problem presented by the Bianchi identity. The new theory is a combination of Eulerian and Lagrangian hydrodynamics, with an extension to thermodynamics. In the first place it is an action principle for adia- batic systems, including the usual conservation laws as well as the Gibbsean variational principle. But it also provides a framework within which dissipation can be introduced in the usual way, by adding a viscosity term to the momentum equation, one of the Euler-Lagrange equations. The rate of the resulting energy dissipation is determined by the equations of motion. It is an ideal framework for the description of quasi-static processes. It is a major development of the Navier-Stokes-Fourier approach, the princi- pal advantage being a hamiltonian structure with a natural concept of energy as a first integral of the motion. Two velocity fields are needed, one the gradient of a scalar potential, the other the time derivative of a vector field (vector potential). Variation of the scalar potential gives the equation of continuity and variation of the vector potential yields the momentum equation. -

A Short History of Physics (Pdf)
A Short History of Physics Bernd A. Berg Florida State University PHY 1090 FSU August 28, 2012. References: Most of the following is copied from Wikepedia. Bernd Berg () History Physics FSU August 28, 2012. 1 / 25 Introduction Philosophy and Religion aim at Fundamental Truths. It is my believe that the secured part of this is in Physics. This happend by Trial and Error over more than 2,500 years and became systematic Theory and Observation only in the last 500 years. This talk collects important events of this time period and attaches them to the names of some people. I can only give an inadequate presentation of the complex process of scientific progress. The hope is that the flavor get over. Bernd Berg () History Physics FSU August 28, 2012. 2 / 25 Physics From Acient Greek: \Nature". Broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves. The universe is commonly defined as the totality of everything that exists or is known to exist. In many ways, physics stems from acient greek philosophy and was known as \natural philosophy" until the late 18th century. Bernd Berg () History Physics FSU August 28, 2012. 3 / 25 Ancient Physics: Remarkable people and ideas. Pythagoras (ca. 570{490 BC): a2 + b2 = c2 for rectangular triangle: Leucippus (early 5th century BC) opposed the idea of direct devine intervention in the universe. He and his student Democritus were the first to develop a theory of atomism. Plato (424/424{348/347) is said that to have disliked Democritus so much, that he wished his books burned.