Shape Analysis & Measurement
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Swimming in Spacetime: Motion by Cyclic Changes in Body Shape
RESEARCH ARTICLE tation of the two disks can be accomplished without external torques, for example, by fixing Swimming in Spacetime: Motion the distance between the centers by a rigid circu- lar arc and then contracting a tension wire sym- by Cyclic Changes in Body Shape metrically attached to the outer edge of the two caps. Nevertheless, their contributions to the zˆ Jack Wisdom component of the angular momentum are parallel and add to give a nonzero angular momentum. Cyclic changes in the shape of a quasi-rigid body on a curved manifold can lead Other components of the angular momentum are to net translation and/or rotation of the body. The amount of translation zero. The total angular momentum of the system depends on the intrinsic curvature of the manifold. Presuming spacetime is a is zero, so the angular momentum due to twisting curved manifold as portrayed by general relativity, translation in space can be must be balanced by the angular momentum of accomplished simply by cyclic changes in the shape of a body, without any the motion of the system around the sphere. external forces. A net rotation of the system can be ac- complished by taking the internal configura- The motion of a swimmer at low Reynolds of cyclic changes in their shape. Then, presum- tion of the system through a cycle. A cycle number is determined by the geometry of the ing spacetime is a curved manifold as portrayed may be accomplished by increasing by ⌬ sequence of shapes that the swimmer assumes by general relativity, I show that net translations while holding fixed, then increasing by (1). -
Art Concepts for Kids: SHAPE & FORM!
Art Concepts for Kids: SHAPE & FORM! Our online art class explores “shape” and “form” . Shapes are spaces that are created when a line reconnects with itself. Forms are three dimensional and they have length, width and depth. This sweet intro song teaches kids all about shape! Scratch Garden Value Song (all ages) https://www.youtube.com/watch?v=coZfbTIzS5I Another great shape jam! https://www.youtube.com/watch?v=6hFTUk8XqEc Cookie Monster eats his shapes! https://www.youtube.com/watch?v=gfNalVIrdOw&list=PLWrCWNvzT_lpGOvVQCdt7CXL ggL9-xpZj&index=10&t=0s Now for the activities!! Click on the links in the descriptions below for the step by step details. Ages 2-4 Shape Match https://busytoddler.com/2017/01/giant-shape-match-activity/ Shapes are an easy art concept for the littles. Lots of their environment gives play and art opportunities to learn about shape. This Matching activity involves tracing the outside shape of blocks and having littles match the block to the outline. It can be enhanced by letting your little ones color the shapes emphasizing inside and outside the shape lines. Block Print Shapes https://thepinterestedparent.com/2017/08/paul-klee-inspired-block-printing/ Printing is a great technique for young kids to learn. The motion is like stamping so you teach little ones to press and pull rather than rub or paint. This project requires washable paint and paper and block that are not natural wood (which would stain) you want blocks that are painted or sealed. Kids can look at Paul Klee art for inspiration in stacking their shapes into buildings, or they can chose their own design Ages 4-6 Lois Ehlert Shape Animals http://www.momto2poshlildivas.com/2012/09/exploring-shapes-and-colors-with-color.html This great project allows kids to play with shapes to make animals in the style of the artist Lois Ehlert. -

Geometric Modeling in Shape Space
Geometric Modeling in Shape Space Martin Kilian Niloy J. Mitra Helmut Pottmann Vienna University of Technology Figure 1: Geodesic interpolation and extrapolation. The blue input poses of the elephant are geodesically interpolated in an as-isometric- as-possible fashion (shown in green), and the resulting path is geodesically continued (shown in purple) to naturally extend the sequence. No semantic information, segmentation, or knowledge of articulated components is used. Abstract space, line geometry interprets straight lines as points on a quadratic surface [Berger 1987], and the various types of sphere geometries We present a novel framework to treat shapes in the setting of Rie- model spheres as points in higher dimensional space [Cecil 1992]. mannian geometry. Shapes – triangular meshes or more generally Other examples concern kinematic spaces and Lie groups which straight line graphs in Euclidean space – are treated as points in are convenient for handling congruent shapes and motion design. a shape space. We introduce useful Riemannian metrics in this These examples show that it is often beneficial and insightful to space to aid the user in design and modeling tasks, especially to endow the set of objects under consideration with additional struc- explore the space of (approximately) isometric deformations of a ture and to work in more abstract spaces. We will show that many given shape. Much of the work relies on an efficient algorithm to geometry processing tasks can be solved by endowing the set of compute geodesics in shape spaces; to this end, we present a multi- closed orientable surfaces – called shapes henceforth – with a Rie- resolution framework to solve the interpolation problem – which mannian structure. -

Shape Synthesis Notes
SHAPE SYNTHESIS OF HIGH-PERFORMANCE MACHINE PARTS AND JOINTS By John M. Starkey Based on notes from Walter L. Starkey Written 1997 Updated Summer 2010 2 SHAPE SYNTHESIS OF HIGH-PERFORMANCE MACHINE PARTS AND JOINTS Much of the activity that takes place during the design process focuses on analysis of existing parts and existing machinery. There is very little attention focused on the synthesis of parts and joints and certainly there is very little information available in the literature addressing the shape synthesis of parts and joints. The purpose of this document is to provide guidelines for the shape synthesis of high-performance machine parts and of joints. Although these rules represent good design practice for all machinery, they especially apply to high performance machines, which require high strength-to-weight ratios, and machines for which manufacturing cost is not an overriding consideration. Examples will be given throughout this document to illustrate this. Two terms which will be used are part and joint. Part refers to individual components manufactured from a single block of raw material or a single molding. The main body of the part transfers loads between two or more joint areas on the part. A joint is a location on a machine at which two or more parts are fastened together. 1.0 General Synthesis Goals Two primary principles which govern the shape synthesis of a part assert that (1) the size and shape should be chosen to induce a uniform stress or load distribution pattern over as much of the body as possible, and (2) the weight or volume of material used should be a minimum, consistent with cost, manufacturing processes, and other constraints. -

Geometry and Art LACMA | | April 5, 2011 Evenings for Educators
Geometry and Art LACMA | Evenings for Educators | April 5, 2011 ALEXANDER CALDER (United States, 1898–1976) Hello Girls, 1964 Painted metal, mobile, overall: 275 x 288 in., Art Museum Council Fund (M.65.10) © Alexander Calder Estate/Artists Rights Society (ARS), New York/ADAGP, Paris EOMETRY IS EVERYWHERE. WE CAN TRAIN OURSELVES TO FIND THE GEOMETRY in everyday objects and in works of art. Look carefully at the image above and identify the different, lines, shapes, and forms of both GAlexander Calder’s sculpture and the architecture of LACMA’s built environ- ment. What is the proportion of the artwork to the buildings? What types of balance do you see? Following are images of artworks from LACMA’s collection. As you explore these works, look for the lines, seek the shapes, find the patterns, and exercise your problem-solving skills. Use or adapt the discussion questions to your students’ learning styles and abilities. 1 Language of the Visual Arts and Geometry __________________________________________________________________________________________________ LINE, SHAPE, FORM, PATTERN, SYMMETRY, SCALE, AND PROPORTION ARE THE BUILDING blocks of both art and math. Geometry offers the most obvious connection between the two disciplines. Both art and math involve drawing and the use of shapes and forms, as well as an understanding of spatial concepts, two and three dimensions, measurement, estimation, and pattern. Many of these concepts are evident in an artwork’s composition, how the artist uses the elements of art and applies the principles of design. Problem-solving skills such as visualization and spatial reasoning are also important for artists and professionals in math, science, and technology. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -
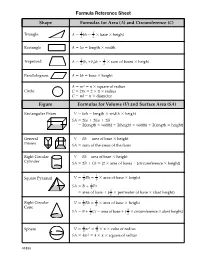
C) Shape Formulas for Volume (V) and Surface Area (SA
Formula Reference Sheet Shape Formulas for Area (A) and Circumference (C) Triangle ϭ 1 ϭ 1 ϫ ϫ A 2 bh 2 base height Rectangle A ϭ lw ϭ length ϫ width Trapezoid ϭ 1 + ϭ 1 ϫ ϫ A 2 (b1 b2)h 2 sum of bases height Parallelogram A ϭ bh ϭ base ϫ height A ϭ πr2 ϭ π ϫ square of radius Circle C ϭ 2πr ϭ 2 ϫ π ϫ radius C ϭ πd ϭ π ϫ diameter Figure Formulas for Volume (V) and Surface Area (SA) Rectangular Prism SV ϭ lwh ϭ length ϫ width ϫ height SA ϭ 2lw ϩ 2hw ϩ 2lh ϭ 2(length ϫ width) ϩ 2(height ϫ width) 2(length ϫ height) General SV ϭ Bh ϭ area of base ϫ height Prisms SA ϭ sum of the areas of the faces Right Circular SV ϭ Bh = area of base ϫ height Cylinder SA ϭ 2B ϩ Ch ϭ (2 ϫ area of base) ϩ (circumference ϫ height) ϭ 1 ϭ 1 ϫ ϫ Square Pyramid SV 3 Bh 3 area of base height ϭ ϩ 1 l SA B 2 P ϭ ϩ 1 ϫ ϫ area of base ( 2 perimeter of base slant height) Right Circular ϭ 1 ϭ 1 ϫ ϫ SV 3 Bh 3 area of base height Cone ϭ ϩ 1 l ϭ ϩ 1 ϫ ϫ SA B 2 C area of base ( 2 circumference slant height) ϭ 4 π 3 ϭ 4 ϫ π ϫ Sphere SV 3 r 3 cube of radius SA ϭ 4πr2 ϭ 4 ϫ π ϫ square of radius 41830 a41830_RefSheet_02MHS 1 8/29/01, 7:39 AM Equations of a Line Coordinate Geometry Formulas Standard Form: Let (x1, y1) and (x2, y2) be two points in the plane. -

Line, Color, Space, Light, and Shape: What Do They Do? What Do They Evoke?
LINE, COLOR, SPACE, LIGHT, AND SHAPE: WHAT DO THEY DO? WHAT DO THEY EVOKE? Good composition is like a suspension bridge; each line adds strength and takes none away… Making lines run into each other is not composition. There must be motive for the connection. Get the art of controlling the observer—that is composition. —Robert Henri, American painter and teacher The elements and principals of art and design, and how they are used, contribute mightily to the ultimate composition of a work of art—and that can mean the difference between a masterpiece and a messterpiece. Just like a reader who studies vocabulary and sentence structure to become fluent and present within a compelling story, an art appreciator who examines line, color, space, light, and shape and their roles in a given work of art will be able to “stand with the artist” and think about how they made the artwork “work.” In this activity, students will practice looking for design elements in works of art, and learn to describe and discuss how these elements are used in artistic compositions. Grade Level Grades 4–12 Common Core Academic Standards • CCSS.ELA-Writing.CCRA.W.3 • CCSS.ELA-Speaking and Listening.CCRA.SL.1 • CCSS.ELA-Literacy.CCSL.2 • CCSS.ELA-Speaking and Listening.CCRA.SL.4 National Visual Arts Standards Still Life with a Ham and a Roemer, c. 1631–34 Willem Claesz. Heda, Dutch • Artistic Process: Responding: Understanding Oil on panel and evaluating how the arts convey meaning 23 1/4 x 32 1/2 inches (59 x 82.5 cm) John G. -

Automatic Computation of Pebble Roundness Using Digital Imagery
Automatic computation of pebble roundness using digital imagery and discrete geometry Tristan Roussillon a, Herve´ Piegay´ b, Isabelle Sivignon c, Laure Tougne a, Franck Lavigne d aUniversity of Lyon, LIRIS, 5 Av Pierre-Mendes` France 69676 Bron bUniversity of Lyon, CNRS-UMR 5600 Environnement, Ville, Societ´ e,´ 15 Parvis Rene´ Descartes, 69364 Lyon cUniversity of Lyon, LIRIS, CNRS, 8 Bd Niels Bohr 69622 Villeurbanne dUniversity of Paris, CNRS-UMR 8591 Laboratoire de Geographie´ Physique, 1 place Aristide Briand, 92195 Meudon Abstract The shape of sedimentary particles is an important property, from which geographical hypotheses related to abrasion, distance of transport, river behavior, etc. can be formulated. In this paper, we use digital image analysis, especially discrete geometry, to automatically compute some shape parameters such as roundness i.e. a measure of how much the corners and edges of a particle have been worn away. In contrast to previous works in which traditional digital images analysis techniques such as Fourier transform (Diepenbroek et al., 1992, Sedimentology, 39) are used, we opted for a discrete geometry approach that allowed us to implement Wadell’s original index (Wadell, 1932, Journal of Geology, 40) which is known to be more accurate, but more time consuming to implement in the field (Pissart et al., 1998, G´eomorphologie: relief, processus, environnement, 3). Preprint submitted to Elsevier 23 October 2017 Our implementation of Wadell’s original index is highly correlated (92%) with the round- ness classes of Krumbein’s chart, used as a ground-truth (Krumbein, 1941, Journal of Sed- imentary Petrology, 11, 2). In addition, we show that other geometrical parameters, which are easier to compute, can be used to provide good approximations of roundness. -

Image Analysis: Evaluating Particle Shape
Image Analysis: Evaluating Particle Shape Jeffrey Bodycomb, Ph.D. HORIBA Scientific www.horiba.com/us/particle © 2011 HORIBA, Ltd. All rights reserved. Why Image Analysis? Verify/Supplement diffraction results (orthogonal technique) Replace sieves Need shape information, for example due to importance of powder flow These may have the same size (cross section), but behave very differently. © 2011 HORIBA, Ltd. All rights reserved. Why Image Analysis? Crystalline, acicular powders needs more than “equivalent diameter” We want to characterize a needle by the length (or better, length and width). © 2011 HORIBA, Ltd. All rights reserved. Why Image Analysis Pictures: contaminants, identification, degree of agglomeration Screen excipients, full morphology Root cause of error (tablet batches), combined w/other techniques Replace manual microscopy © 2011 HORIBA, Ltd. All rights reserved. Why Shape Information? Evaluating packing Evaluate flow of particles Evaluate flow around particles Retroreflection (optical properties) Properties of particles in aggregate (bulk) © 2011 HORIBA, Ltd. All rights reserved. Effect of Shape on Flow Yes, I assumed density doesn’t matter. Roundness is a measure based on particle perimeter. θc © 2011 HORIBA, Ltd. All rights reserved. Major Steps in Image Analysis Image Acquisition and enhancement Object/Phase detection Measurements © 2011 HORIBA, Ltd. All rights reserved. Two Approaches Dynamic: Static: particles flow past camera particles fixed on slide, stage moves slide 0.5 – 1000 microns 1 – 3000 microns 2000 microns w/1.25 objective © 2011 HORIBA, Ltd. All rights reserved. Size Parameters -> Shape Parameters Shape parameters are often calculated using size measures © 2011 HORIBA, Ltd. All rights reserved. Size Parameters Feret zMax (length) zPerpendicular to Max (width) zMin (width) zPerpendicular to Min (main length) Area zCircular Diameter zSpherical Diameter Perimeter Convex Perimeter © 2011 HORIBA, Ltd. -

Shape, Dimension, and Geometric Relationships Calendar Pacing 3 Times Per Checkpoint
Content Area Mathematics Grade/Course Preschool School Year 2018-19 Framework Number: Name 02: Shape, Dimension, and Geometric Relationships Calendar Pacing 3 times per checkpoint ULTIMATE CURRICULUM FRAMEWORK GOALS Ultimate Performance Task The most important performance we want learners to be able to do with the acquired content knowledge and skills of this framework is: ● to use their understanding of order and position to independently describe location. ● to describe attributes of a new shape in a new orientation or new setting. ● to explain how they independently organized various groups of objects. Transfer Goal(s) Students will be able to independently use their learning to … ● describe shape attributes and positioning in order to describe and understand the environment such as in following directions, organizing and arranging their space through critical thinking and problem solving. Meaning Goals BIG IDEAS / UNDERSTANDINGS ESSENTIAL QUESTIONS Students will understand that … Students will keep considering: ● they need to be able to describe the location of objects. ● How do we describe where something is? ● they need to be able to describe the characteristics of shapes ● How are these shapes the same or different? including three-dimensional shapes. ● What ways are objects sorted? IDEAS IMPORTANTES / CONOCIMIENTOS PREGUNTAS ESENCIALES Los estudiantes comprenderán que … Los estudiantes seguirán teniendo en cuenta: ● necesitarán poder describir la ubicación de objetos. ● ¿Cómo describimos la ubicación de las cosas? ● necesitaran describir las características de formas incluyendo ● ¿Cómo son las formas iguales o diferentes? formas tridimensionales. ● ¿En qué maneras se pueden ordenar los objetos? Acquisition Goals In order to reach the ULTIMATE GOALS, students must have acquired the following knowledge, skills, and vocabulary. -

Quick Guide to Precision Measuring Instruments
E4329 Quick Guide to Precision Measuring Instruments Coordinate Measuring Machines Vision Measuring Systems Form Measurement Optical Measuring Sensor Systems Test Equipment and Seismometers Digital Scale and DRO Systems Small Tool Instruments and Data Management Quick Guide to Precision Measuring Instruments Quick Guide to Precision Measuring Instruments 2 CONTENTS Meaning of Symbols 4 Conformance to CE Marking 5 Micrometers 6 Micrometer Heads 10 Internal Micrometers 14 Calipers 16 Height Gages 18 Dial Indicators/Dial Test Indicators 20 Gauge Blocks 24 Laser Scan Micrometers and Laser Indicators 26 Linear Gages 28 Linear Scales 30 Profile Projectors 32 Microscopes 34 Vision Measuring Machines 36 Surftest (Surface Roughness Testers) 38 Contracer (Contour Measuring Instruments) 40 Roundtest (Roundness Measuring Instruments) 42 Hardness Testing Machines 44 Vibration Measuring Instruments 46 Seismic Observation Equipment 48 Coordinate Measuring Machines 50 3 Quick Guide to Precision Measuring Instruments Quick Guide to Precision Measuring Instruments Meaning of Symbols ABSOLUTE Linear Encoder Mitutoyo's technology has realized the absolute position method (absolute method). With this method, you do not have to reset the system to zero after turning it off and then turning it on. The position information recorded on the scale is read every time. The following three types of absolute encoders are available: electrostatic capacitance model, electromagnetic induction model and model combining the electrostatic capacitance and optical methods. These encoders are widely used in a variety of measuring instruments as the length measuring system that can generate highly reliable measurement data. Advantages: 1. No count error occurs even if you move the slider or spindle extremely rapidly. 2. You do not have to reset the system to zero when turning on the system after turning it off*1.