Geometric Modeling in Shape Space
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Swimming in Spacetime: Motion by Cyclic Changes in Body Shape
RESEARCH ARTICLE tation of the two disks can be accomplished without external torques, for example, by fixing Swimming in Spacetime: Motion the distance between the centers by a rigid circu- lar arc and then contracting a tension wire sym- by Cyclic Changes in Body Shape metrically attached to the outer edge of the two caps. Nevertheless, their contributions to the zˆ Jack Wisdom component of the angular momentum are parallel and add to give a nonzero angular momentum. Cyclic changes in the shape of a quasi-rigid body on a curved manifold can lead Other components of the angular momentum are to net translation and/or rotation of the body. The amount of translation zero. The total angular momentum of the system depends on the intrinsic curvature of the manifold. Presuming spacetime is a is zero, so the angular momentum due to twisting curved manifold as portrayed by general relativity, translation in space can be must be balanced by the angular momentum of accomplished simply by cyclic changes in the shape of a body, without any the motion of the system around the sphere. external forces. A net rotation of the system can be ac- complished by taking the internal configura- The motion of a swimmer at low Reynolds of cyclic changes in their shape. Then, presum- tion of the system through a cycle. A cycle number is determined by the geometry of the ing spacetime is a curved manifold as portrayed may be accomplished by increasing by ⌬ sequence of shapes that the swimmer assumes by general relativity, I show that net translations while holding fixed, then increasing by (1). -
Art Concepts for Kids: SHAPE & FORM!
Art Concepts for Kids: SHAPE & FORM! Our online art class explores “shape” and “form” . Shapes are spaces that are created when a line reconnects with itself. Forms are three dimensional and they have length, width and depth. This sweet intro song teaches kids all about shape! Scratch Garden Value Song (all ages) https://www.youtube.com/watch?v=coZfbTIzS5I Another great shape jam! https://www.youtube.com/watch?v=6hFTUk8XqEc Cookie Monster eats his shapes! https://www.youtube.com/watch?v=gfNalVIrdOw&list=PLWrCWNvzT_lpGOvVQCdt7CXL ggL9-xpZj&index=10&t=0s Now for the activities!! Click on the links in the descriptions below for the step by step details. Ages 2-4 Shape Match https://busytoddler.com/2017/01/giant-shape-match-activity/ Shapes are an easy art concept for the littles. Lots of their environment gives play and art opportunities to learn about shape. This Matching activity involves tracing the outside shape of blocks and having littles match the block to the outline. It can be enhanced by letting your little ones color the shapes emphasizing inside and outside the shape lines. Block Print Shapes https://thepinterestedparent.com/2017/08/paul-klee-inspired-block-printing/ Printing is a great technique for young kids to learn. The motion is like stamping so you teach little ones to press and pull rather than rub or paint. This project requires washable paint and paper and block that are not natural wood (which would stain) you want blocks that are painted or sealed. Kids can look at Paul Klee art for inspiration in stacking their shapes into buildings, or they can chose their own design Ages 4-6 Lois Ehlert Shape Animals http://www.momto2poshlildivas.com/2012/09/exploring-shapes-and-colors-with-color.html This great project allows kids to play with shapes to make animals in the style of the artist Lois Ehlert. -

Discussion on Application for Interior Space Design and the Application of Interior Design Style
3rd International Conference on Education, Management and Computing Technology (ICEMCT 2016) Discussion on Application for Interior Space Design and the Application of Interior Design Style Xiaodong Zhang Institute of Environmental art design, Hebei Institute of Fine Art, Shijiazhuang hebei, 050700, China Keywords: interior design, psychological space, design style Abstract. Interior design is the essence of the interior space design, including physical space design and psychological space design two levels. Interior design style is an important issue for interior designers and owners. Through analysis and Research on the relationships between design and interior design style of interior space, summed up the "interior space design to create a style of interior design" and "interior design style shape the psychological space two obvious characteristics. Interior Space Design and Its Content The Meaning of Interior Space Design. Interior space design is a creative activity of human transformation of living space, through the interior space design can make human living environment become more comfortable [1]. Although the "interior space design" theory is not a long time, but has been constantly being human practice. Since ancient times, human beings have been in the pursuit of the security of living space. Full, comfortable and beautiful. People in the primitive society in the cave laying leaves, weeds and skins and in the walls of the cave with color drawing lines and patterns, and so on for living space transformation, which all belong to the indoor space design. Interior space design is not only focused on solving the relationship between people and nature, but also more and more focus on solving the problem of the relationship between people and society, so that people in the community better work and life. -

Analyzing Space Dimensions in Video Games
SBC { Proceedings of SBGames 2019 | ISSN: 2179-2259 Art & Design Track { Full Papers Analyzing Space Dimensions in Video Games Leandro Ouriques Geraldo Xexéo Eduardo Mangeli Programa de Engenharia de Sistemas e Programa de Engenharia de Sistemas e Programa de Engenharia de Sistemas e Computação, COPPE/UFRJ Computação, COPPE/UFRJ Computação, COPPE/UFRJ Center for Naval Systems Analyses Departamento de Ciência da Rio de Janeiro, Brazil (CASNAV), Brazilian Nay Computação, IM/UFRJ E-mail: [email protected] Rio de Janeiro, Brazil Rio de Janeiro, Brazil E-mail: [email protected] E-mail: [email protected] Abstract—The objective of this work is to analyze the role of types of game space without any visualization other than space in video games, in order to understand how game textual. However, in 2018, Matsuoka et al. presented a space affects the player in achieving game goals. Game paper on SBGames that analyzes the meaning of the game spaces have evolved from a single two-dimensional screen to space for the player, explaining how space commonly has huge, detailed and complex three-dimensional environments. significance in video games, being bound to the fictional Those changes transformed the player’s experience and have world and, consequently, to its rules and narrative [5]. This encouraged the exploration and manipulation of the space. led us to search for a better understanding of what is game Our studies review the functions that space plays, describe space. the possibilities that it offers to the player and explore its characteristics. We also analyze location-based games where This paper is divided in seven parts. -

Shape Synthesis Notes
SHAPE SYNTHESIS OF HIGH-PERFORMANCE MACHINE PARTS AND JOINTS By John M. Starkey Based on notes from Walter L. Starkey Written 1997 Updated Summer 2010 2 SHAPE SYNTHESIS OF HIGH-PERFORMANCE MACHINE PARTS AND JOINTS Much of the activity that takes place during the design process focuses on analysis of existing parts and existing machinery. There is very little attention focused on the synthesis of parts and joints and certainly there is very little information available in the literature addressing the shape synthesis of parts and joints. The purpose of this document is to provide guidelines for the shape synthesis of high-performance machine parts and of joints. Although these rules represent good design practice for all machinery, they especially apply to high performance machines, which require high strength-to-weight ratios, and machines for which manufacturing cost is not an overriding consideration. Examples will be given throughout this document to illustrate this. Two terms which will be used are part and joint. Part refers to individual components manufactured from a single block of raw material or a single molding. The main body of the part transfers loads between two or more joint areas on the part. A joint is a location on a machine at which two or more parts are fastened together. 1.0 General Synthesis Goals Two primary principles which govern the shape synthesis of a part assert that (1) the size and shape should be chosen to induce a uniform stress or load distribution pattern over as much of the body as possible, and (2) the weight or volume of material used should be a minimum, consistent with cost, manufacturing processes, and other constraints. -

Chapter 6: Design and Design Frameworks: Investing in KBC and Economic Performance
323 | DESIGN AND DESIGN FRAMEWORKS: INVESTMENT IN KBC AND ECONOMIC PERFORMANCE CHAPTER 6. DESIGN AND DESIGN FRAMEWORKS: INVESTMENT IN KBC AND ECONOMIC PERFORMANCE This chapter addresses the nature and the economic impact of design by looking at design-related intellectual property and how businesses protect their knowledge based capital. The chapter reviews the nature and various definitions of design and how design-related IP, specifically registered designs, relates to other formal IP mechanisms such as patents, trademarks, and copyright. It looks at the primary areas of design activity in a subset of OECD countries and investigates the similarities and differences of the constituent design IP regimes as well as the various treaties governing international design IP regulation. The review continues with an examination of how design-related IP functions in comparison to and in conjunction with other formal and informal IP protection mechanisms and what factors motivate firms to choose and appropriate combinations of protection mechanisms. By examining historical patterns of design registrations in a variety of ways, this chapter identifies trends, at the national level, of how firms perceive the importance of design-related IP. Analysis of national origins of registrations in both the European Community and the United States provides an indicator of the activity of those countries’ businesses relative to their proximities to the markets. It explores the existence of possible alternative indicators for design activity and of industry-specific variations across the sample set. The chapter concludes with a review of input and output measures as stated in the limited set of studies that have endeavoured to establish or quantify the value and/or benefit of design and design-related IP. -

Geometry and Art LACMA | | April 5, 2011 Evenings for Educators
Geometry and Art LACMA | Evenings for Educators | April 5, 2011 ALEXANDER CALDER (United States, 1898–1976) Hello Girls, 1964 Painted metal, mobile, overall: 275 x 288 in., Art Museum Council Fund (M.65.10) © Alexander Calder Estate/Artists Rights Society (ARS), New York/ADAGP, Paris EOMETRY IS EVERYWHERE. WE CAN TRAIN OURSELVES TO FIND THE GEOMETRY in everyday objects and in works of art. Look carefully at the image above and identify the different, lines, shapes, and forms of both GAlexander Calder’s sculpture and the architecture of LACMA’s built environ- ment. What is the proportion of the artwork to the buildings? What types of balance do you see? Following are images of artworks from LACMA’s collection. As you explore these works, look for the lines, seek the shapes, find the patterns, and exercise your problem-solving skills. Use or adapt the discussion questions to your students’ learning styles and abilities. 1 Language of the Visual Arts and Geometry __________________________________________________________________________________________________ LINE, SHAPE, FORM, PATTERN, SYMMETRY, SCALE, AND PROPORTION ARE THE BUILDING blocks of both art and math. Geometry offers the most obvious connection between the two disciplines. Both art and math involve drawing and the use of shapes and forms, as well as an understanding of spatial concepts, two and three dimensions, measurement, estimation, and pattern. Many of these concepts are evident in an artwork’s composition, how the artist uses the elements of art and applies the principles of design. Problem-solving skills such as visualization and spatial reasoning are also important for artists and professionals in math, science, and technology. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -
Intelligent Design Creationism and the Constitution
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Washington University St. Louis: Open Scholarship Washington University Law Review Volume 83 Issue 1 2005 Is It Science Yet?: Intelligent Design Creationism and the Constitution Matthew J. Brauer Princeton University Barbara Forrest Southeastern Louisiana University Steven G. Gey Florida State University Follow this and additional works at: https://openscholarship.wustl.edu/law_lawreview Part of the Constitutional Law Commons, Education Law Commons, First Amendment Commons, Religion Law Commons, and the Science and Technology Law Commons Recommended Citation Matthew J. Brauer, Barbara Forrest, and Steven G. Gey, Is It Science Yet?: Intelligent Design Creationism and the Constitution, 83 WASH. U. L. Q. 1 (2005). Available at: https://openscholarship.wustl.edu/law_lawreview/vol83/iss1/1 This Article is brought to you for free and open access by the Law School at Washington University Open Scholarship. It has been accepted for inclusion in Washington University Law Review by an authorized administrator of Washington University Open Scholarship. For more information, please contact [email protected]. Washington University Law Quarterly VOLUME 83 NUMBER 1 2005 IS IT SCIENCE YET?: INTELLIGENT DESIGN CREATIONISM AND THE CONSTITUTION MATTHEW J. BRAUER BARBARA FORREST STEVEN G. GEY* TABLE OF CONTENTS ABSTRACT ................................................................................................... 3 INTRODUCTION.................................................................................................. -
C) Shape Formulas for Volume (V) and Surface Area (SA
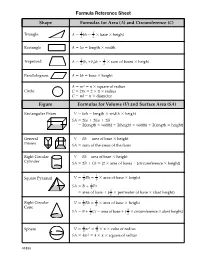
Formula Reference Sheet Shape Formulas for Area (A) and Circumference (C) Triangle ϭ 1 ϭ 1 ϫ ϫ A 2 bh 2 base height Rectangle A ϭ lw ϭ length ϫ width Trapezoid ϭ 1 + ϭ 1 ϫ ϫ A 2 (b1 b2)h 2 sum of bases height Parallelogram A ϭ bh ϭ base ϫ height A ϭ πr2 ϭ π ϫ square of radius Circle C ϭ 2πr ϭ 2 ϫ π ϫ radius C ϭ πd ϭ π ϫ diameter Figure Formulas for Volume (V) and Surface Area (SA) Rectangular Prism SV ϭ lwh ϭ length ϫ width ϫ height SA ϭ 2lw ϩ 2hw ϩ 2lh ϭ 2(length ϫ width) ϩ 2(height ϫ width) 2(length ϫ height) General SV ϭ Bh ϭ area of base ϫ height Prisms SA ϭ sum of the areas of the faces Right Circular SV ϭ Bh = area of base ϫ height Cylinder SA ϭ 2B ϩ Ch ϭ (2 ϫ area of base) ϩ (circumference ϫ height) ϭ 1 ϭ 1 ϫ ϫ Square Pyramid SV 3 Bh 3 area of base height ϭ ϩ 1 l SA B 2 P ϭ ϩ 1 ϫ ϫ area of base ( 2 perimeter of base slant height) Right Circular ϭ 1 ϭ 1 ϫ ϫ SV 3 Bh 3 area of base height Cone ϭ ϩ 1 l ϭ ϩ 1 ϫ ϫ SA B 2 C area of base ( 2 circumference slant height) ϭ 4 π 3 ϭ 4 ϫ π ϫ Sphere SV 3 r 3 cube of radius SA ϭ 4πr2 ϭ 4 ϫ π ϫ square of radius 41830 a41830_RefSheet_02MHS 1 8/29/01, 7:39 AM Equations of a Line Coordinate Geometry Formulas Standard Form: Let (x1, y1) and (x2, y2) be two points in the plane. -

Line, Color, Space, Light, and Shape: What Do They Do? What Do They Evoke?
LINE, COLOR, SPACE, LIGHT, AND SHAPE: WHAT DO THEY DO? WHAT DO THEY EVOKE? Good composition is like a suspension bridge; each line adds strength and takes none away… Making lines run into each other is not composition. There must be motive for the connection. Get the art of controlling the observer—that is composition. —Robert Henri, American painter and teacher The elements and principals of art and design, and how they are used, contribute mightily to the ultimate composition of a work of art—and that can mean the difference between a masterpiece and a messterpiece. Just like a reader who studies vocabulary and sentence structure to become fluent and present within a compelling story, an art appreciator who examines line, color, space, light, and shape and their roles in a given work of art will be able to “stand with the artist” and think about how they made the artwork “work.” In this activity, students will practice looking for design elements in works of art, and learn to describe and discuss how these elements are used in artistic compositions. Grade Level Grades 4–12 Common Core Academic Standards • CCSS.ELA-Writing.CCRA.W.3 • CCSS.ELA-Speaking and Listening.CCRA.SL.1 • CCSS.ELA-Literacy.CCSL.2 • CCSS.ELA-Speaking and Listening.CCRA.SL.4 National Visual Arts Standards Still Life with a Ham and a Roemer, c. 1631–34 Willem Claesz. Heda, Dutch • Artistic Process: Responding: Understanding Oil on panel and evaluating how the arts convey meaning 23 1/4 x 32 1/2 inches (59 x 82.5 cm) John G. -

An Overview of the Building Delivery Process
An Overview of the Building Delivery CHAPTER Process 1 (How Buildings Come into Being) CHAPTER OUTLINE 1.1 PROJECT DELIVERY PHASES 1.11 CONSTRUCTION PHASE: CONTRACT ADMINISTRATION 1.2 PREDESIGN PHASE 1.12 POSTCONSTRUCTION PHASE: 1.3 DESIGN PHASE PROJECT CLOSEOUT 1.4 THREE SEQUENTIAL STAGES IN DESIGN PHASE 1.13 PROJECT DELIVERY METHOD: DESIGN- BID-BUILD METHOD 1.5 CSI MASTERFORMAT AND SPECIFICATIONS 1.14 PROJECT DELIVERY METHOD: 1.6 THE CONSTRUCTION TEAM DESIGN-NEGOTIATE-BUILD METHOD 1.7 PRECONSTRUCTION PHASE: THE BIDDING 1.15 PROJECT DELIVERY METHOD: CONSTRUCTION DOCUMENTS MANAGEMENT-RELATED METHODS 1.8 PRECONSTRUCTION PHASE: THE SURETY BONDS 1.16 PROJECT DELIVERY METHOD: DESIGN-BUILD METHOD 1.9 PRECONSTRUCTION PHASE: SELECTING THE GENERAL CONTRACTOR AND PROJECT 1.17 INTEGRATED PROJECT DELIVERY METHOD DELIVERY 1.18 FAST-TRACK PROJECT SCHEDULING 1.10 CONSTRUCTION PHASE: SUBMITTALS AND CONSTRUCTION PROGRESS DOCUMENTATION Building construction is a complex, significant, and rewarding process. It begins with an idea and culminates in a structure that may serve its occupants for several decades, even centuries. Like the manufacturing of products, building construction requires an ordered and planned assembly of materials. It is, however, far more complicated than product manufacturing. Buildings are assembled outdoors by a large number of diverse constructors and artisans on all types of sites and are subject to all kinds of weather conditions. Additionally, even a modest-sized building must satisfy many performance criteria and legal constraints, requires an immense variety of materials, and involves a large network of design and production firms. Building construction is further complicated by the fact that no two buildings are identical; each one must be custom built to serve a unique function and respond to its specific context and the preferences of its owner, user, and occupant.