Automated Excavator, First Experiences in Germany
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Construction Equipment
CONSTRUCTION EQUIPMENT U.S. PRICE LIST COMPACT EXCAVATORS PL-200 MX SAP REVISION 11 EFFECTIVE JULY 1, 2014 THIS IS AN ELECTRONIC COPY ONLY – HARD COPIES WILL NOT BE DISTRIBUTED. This price list is intended for dealers with the Compact Excavators (MX) contract only. The prices included in this revision supersede any prices established prior to the effective date shown unless specifically identified in a price bulletin as superseding this price list. Below is a list of Family(s) and Model(s) that are included in this price list. Crawler Excavator (Mini) CX17B CX27B CX31B T4 FINAL CX36B T4 FINAL CX55B T4 FINAL PLEASE NOTE: Retain the price book pages of the discontinued series for your records. Copyright 2014 By CNH Industrial America LLC Page 1 of 44 (This page intentionally left blank) Page 2 of 44 General Information Prices shown herein are suggested prices only and in no way are they to be construed as limiting or restricting the dealer in his determination of the ultimate retail selling price. It is understood that the dealers are free to determine their selling price. Subject to any Federal, State or local laws. Where shown herein liquid capacities are U.S. measure unless otherwise noted. ADVANCE FREIGHT Advance freight will be added to the machinery invoice as a separate net charge for machinery shipped from field locations or from other than specified Ex Works locations. PRICES Prices are Ex Works factory, where the goods are manufactured, except where noted. For detailed information concerning prices, please refer to your OPERATING GUIDE. Prices and specifications are subject to change without notice. -

WARNING 3 TON HYDRAULIC EXCAVATOR The
WARNING 3 TON HYDRAULIC EXCAVATOR Any piece of equipment can be dangerous if not operated properly. YOU are responsible for the safe operation of this equipment. The operator must carefully read and follow any warnings, safety signs and instructions provided with or located on the equipment. Do not remove, defeat, deface or render inoperable any of the safety devices or warnings on this equipment. If any safety devices or warnings have been removed, defeated, defaced, or rendered inoperable, DO NOT USE THIS EQUIPMENT!!! WARNING: Operating, servicing, and maintaining this equipment can expose you to chemicals including engine exhaust, carbon monoxide and lead, which are known to the State of California to cause cancer and birth defects or other reproductive harm. To minimize your exposure, avoid breathing exhaust, do not idle the engine except as necessary, operate and service your equipment in a well-ventilated area and wear gloves or wash your hands frequently when servicing your equipment. For more information go to www.P65warnings.ca.gov WARNING! • Never operate power equipment of any kind if you are tired or if you are under the influence of alcohol, drugs, medication, or any substance that could affect your ability or judgment. Be alert! If you get tired while operating this equipment, take a break. Tiredness may result in loss of control. • Provide adequate ventilation when operating this equipment. Internal combustion engines consume oxygen and give off deadly carbon monoxide gas. • DANGER: This equipment has multiple pinch points that can cause dismemberment or death. Keep hands, feet and all other body parts clear at all times. -

John Deere Construction Equipment Fleet Sheet
EQUIPMENT FLEET 17G EXCAVATOR 345G LC EXCAVATOR 655K LOADER 304L LOADER 1720-kg (3,790 lb.) 35 700-kg (78,710 lb.) 116 kW (155 net hp) / 48 kW (65 net hp) / operating weight operating weight 1.6–1.9-m3 (2.1–2.4 cu. yd.) 0.8–1.6-m3 (1.0–2.1 cu. yd.) heaped bucket capacities heaped bucket capacities 26G EXCAVATOR 350G LC EXCAVATOR 2620–2770-kg (5,780– 36 131-kg (79,655 lb.) 755K LOADER 324L LOADER 6,110 lb.) operating weight operating weight 145 kW (194 net hp) / 52 kW (71 net hp) / 2.0–2.5-m3 (2.6–3.2 cu. yd.) 0.8–1.6-m3 (1.0–2.1 cu. yd.) heaped bucket capacities heaped bucket capacities 30G EXCAVATOR 380G LC EXCAVATOR 3105–3275-kg (6,850– 38 208-kg (84,234 lb.) 7,220 lb.) operating weight operating weight 317G COMPACT TRACK LOADER 344L LOADER 48.5 kW (65 gross hp) / 45.6 kW 76 kW (103 net hp) / (61 net hp) / 965-kg (2,125 lb.) 1.5–2.0-m3 (2.0–2.6 cu. yd.) rated operating capacity heaped bucket capacities 35G EXCAVATOR 470G LC EXCAVATOR 3520–3690-kg (7,760– 51 218-kg (112,916 lb.) 8,135 lb.) operating weight operating weight 325G COMPACT TRACK LOADER 444 P-TIER LOADER 54.8 kW (74 gross hp) / 52.5 kW 92 kW (124 net hp) / 3 670G LC EXCAVATOR (70 net hp) / 1176-kg (2,590 lb.) 1.9–3.4-m (2.5–4.5 cu. -
Working Everyday As a Bulldozer and Excavator Owner/Operator Is Tough
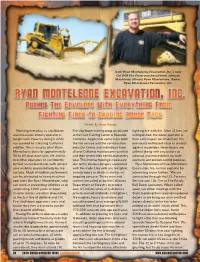
(Left) Ryan Monteleone Excavation, Inc.’s new Cat D6R Fire Dozer purchased from Johnson Machinery. (Above) Ryan Monteleone, Owner, Ryan Monteleone Excavation, Inc. Written By: Brian Hoover Working everyday as a bulldozer Fire’s bulldozer training program located fighting fire with fire. After all fires are and excavator owner/operator is at the Clark Training Center in Riverside, extinguished, the dozer operator is tough work. Now try doing it while California. Applicants come from both then called upon to rehabilitate the surrounded by a blazing California the fire service and the construction previously bulldozed areas to protect wildfire. This is exactly what Ryan industry. Crews and individuals from against mudslides. Here dozers are Monteleone does for approximately all over California must become certified utilized along with excavators to 30 to 60 days each year. He and his and then renew their certification every cleanup and move debris for both two other operators sit confidently year. This intense training is necessary cosmetic and erosion control purposes. behind an enclosed cab, with almost due to the obvious dangers associated Ryan Monteleone of Ryan Monteleone zero visibility, protected only by fire with this trade. Like with any firefighter, Excavation, Inc. further explains his curtains. Much of wildfire confinement serious injury or death is always an interesting niche further, “We are can be attributed to heavy machine ongoing concern. These men and contracted through the U.S. Forestry operators like Ryan Monteleone, who women are called on by the California Service and CAL Fire as Fire Ready can work at preventing wildfires at an Department of Forestry to protect Bull Dozer operators. -

Cat® 313F Hydraulic Excavator
Cat® 313F Hydraulic Excavator The Cat® 313F excavator is a reliable and versatile solution for your light to medium duty applications. Featuring a fuel-effi cient Cat C4.4 engine, robust frames and components, and a state-of-the-art hydraulic system, the 313F allows you to move material all day with speed and precision. Not all features are available in all regions. Consult your Cat dealer for specifi c confi gurations available in your region. High Performance • Change your oil without the use of tools with the incorporated engine oil drain valve. • The Cat C 4.4 engine can run on biodiesel up to B2 0 and meets U.S. EPA Tier 4 Final and EU Stage IV emission standards with an • Three levels of fuel filtration protect the engine from dir t y fuel. af ter treatment system that requires no maintenance or downtime. • Blowing out debris is easy with wide clearance bet ween the • Two power modes – eco and high power – help you manage fuel radiator, oil cooler, and air conditioning condenser. for the work you need to do. • E x tract fluid samples for analysis quickly and easily with SM • Reduce engine speed and minimize fuel consumption during no-load S·O·S por ts. or light-load conditions with automatic engine speed control (AEC). • Engine idle shutdown allows you to set inter vals so you don’t Reliability and Durability You Can Count On waste fuel; it also helps reduce emissions and wear and tear on • Count on your machine to withstand wear throughout the years. -
Backhoe Loader Specifications
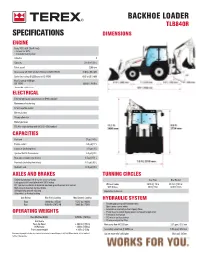
BACKHOE LOADER TLB840R SPECIFICATIONS DIMENSIONS ENGINE Deutz TCD 3.6 L4 (Tier 4 Final) – Torque rise 63% – Electronic fuel injection Cylinders 4 Capacity 219.6 in3 | 3.6 L Rated speed 2200 rpm Gross power @ 2200 rpm Cert. Rating to UN/ECE R120 74.0 hp | 55.4 kW Derived net rating @ 2200 rpm to ISO 14396 69.3 hp | 51.9 kW Max Torque @ 1300 rpm ISO 14396 288 lbf | 390 Nm * Nominal Non–certified Values ELECTRICAL External wiring and connectors meet IP69k standard Maintenance free battery 12 volt negative ground Battery isolator 95 amp alternator Blade type fuses 110 A/hr single battery with 920 CCA – EN Standard CAPACITIES Fuel tank 37 gal | 140 L Engine coolant 4.5 gal | 17 L Engine oil (including filter) 2.11 gal | 8 L Synchro Shuttle Transmission 5.3 gal | 20 L Rear axle (including final drives) 4.5 gal | 17.1 L Front axle (including final drives) 2.25 gal | 8.5 L Hydraulic tank 18.5 gal | 70 L AXLES AND BRAKES TURNING CIRCLES Outboard planetary final drives for easier servicing Over Tires Over Bucket Foot operated differential lock with 100% lockup 16° front axle oscillation to maintain maximum ground contact and traction Without brakes 25.75 ft | 7.9 m 35.75 ft | 10.9 m High capacity mounted wet disc brakes With brakes 23 ft | 7.0 m 32.6 ft | 10 m Self equalizing and self adjusting Depending on tire size Selectable 2 or 4 wheel braking Axle Ratings Max Static Loading Max Dynamic Loading HYDRAULIC SYSTEM Front 39342 lbs | 175 kN 15737 lbs | 90 kN Rear 42169 lbs | 187.5 kN 16861 lbs | 75 kN – Tandem gear pumps with inloader valve – Open centre -

Technical Specifications for 320 Hydraulic Excavator, AEXQ2161-01
320 Hydraulic Excavator Technical Specifications Engine Track Engine Model Cat® C4.4 ACERT™ Standard Track Shoe Width 790 mm 31 in Net Power (ISO 9249) 121 kW 162 hp Number of Shoes (each side) 49 Net Power (SAE J1349) 121 kW 162 hp Number of Track Rollers (each side) 8 Gross Power (ISO 14396/SAE J1995) 122 kW 164 hp Number of Carrier Rollers (each side) 2 Bore 105 mm 4 in Stroke 127 mm 5 in Drive Displacement 4.4 L 269 in3 Maximum Gradeability 35°/70% • The 320 meets U.S. EPA Tier 4 Final emission standards. Maximum Travel Speed 5.7 km/h 3.5 mph • Recommended for use up to 4500 m (14,764 ft) altitude with Maximum Drawbar Pull – 205 kN 45,996 lbf engine power derate above 3000 m (9,842.5 ft). Long Undercarriage • Net power advertised is the power available at the fl ywheel when the engine is equipped with fan, air cleaner, muffl er and alternator. Hydraulic System • Rating at 1,800 rpm. Main System – Maximum Flow 429 L/min 113 gal/min Engine rpm (Implement) (214.5 × (56.5 × 2 pumps) 2 pumps) Operation 1,650 rpm Swing System – Maximum Flow No swing pump Travel 1,800 rpm Maximum Pressure – Equipment – 35 000 kPa 5,075 psi Normal Swing Mechanism Maximum Pressure – Equipment – 38 000 kPa 5,510 psi Swing Speed 11.30 rpm Lift Mode Maximum Swing Torque 74 kN·m 54,440 lbf-ft Maximum Pressure – Travel 34 300 kPa 4,974 psi Maximum Pressure – Swing 26 800 kPa 3,886 psi Weights Boom Cylinder – Bore 120 mm 5 in Operating Weight 22 500 kg 49,600 lb Boom Cylinder – Stroke 1260 mm 50 in • Reach boom, R2.9 (9'6") stick, HD 1.19 m3 (1.56 yd3) bucket Stick Cylinder – Bore 140 mm 6 in and 790 mm (31 in) triple grouser shoes. -

Development of Pc210lci-10/Pc200i-10 Machine Control Hydraulic Excavator
Technical Paper Development of PC210LCi-10/PC200i-10 Machine Control Hydraulic Excavator Yuki Shimano Yoshiki Kami Kenichirou Shimokaze In recent years, the efficient construction work thanks to the computerized construction utilizing the ICT technology has been expanded in the market, which contains shortening of a construction period by abolishing the finishing stake which was necessary in the conventional construction work, improvement of execution accuracy, and execution progress management. From this trend, there are growing needs for construction machinery responding to it. When it comes to hydraulic excavators, machines installed with Machine Guidance (MG) have been commercialized including after-market products. However, finishing grading was somewhat dependent on skills of operators monitoring the display. Accordingly, we have developed the machine-controlled hydraulic excavator highly improved in construction efficiency, which enables machine control in a series of operations from rough digging to grading, thanks to the combination of the hydraulic control technology from Komatsu unique components and the GNSS surveying technology. This excavator has released on the computerized-construction-advanced markets of Japan, U.S. and Europe ahead of other competitors. Key Words: PC210LCi-10/PC200i-10, Machine Control Hydraulic Excavator, Automatic Grading Assist, Automatic Stop Control, ICT Construction, Construction Management, GNSS perform work at a construction site without finishing stake 1. Introduction according to the guidance while looking at the guidance monitor. Therefore, final finishing accuracy was largely Construction machinery utilizing GNSS surveying dependent on the skill of operator. technology contributes greatly to the reduction in man-hours We have developed an innovative 20-ton class MC through abolishing of finishing stake. -
BACKHOE LOADER Shift Productivity Into a Higher Gear
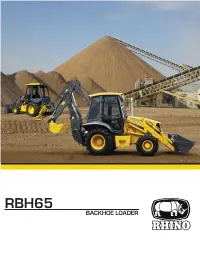
RBH65 BACKHOE LOADER Shift productivity into a higher gear. 1 2 3 Whether you're digging, trenching, back-filling or handling material, we have a Rhino Backhoe Loader to meet your needs. Rhino Backhoe Loaders set the industry standard for operator comfort, exceptional performance, versatility and jobsite efficiency. 1. The ergonomic, automotive style operator station helps you work comfortably and productively all day long. 2. Ergonomic excavator-style joystick controls provide precise control with low effort. 3. The operation smooth in all conditions, including load and carry, highway roading or simply moving around the job site. 2 Maximize versatility, end to end. 1 2 3 The Cummins engine provides cleaner, quieter operation while delivering supe- rior performance and durability. The Loader boom design provides supe- rior reach, enabling to easily dump to the center of most trucks, for quick and efficient loading. 1. The closed center hydraulic system matches pressure and flow to the job demands. 2. Rhino cylinders offer superior strength and dent resistance deliver longer component life and reduced risk of system contami- nation. Rhino Cylinders and Rods are designed to allow for a variety of service / repair options. 3. Increase the versatility of your machine with the large selection of backhoe attachments. 3 ENGINE Emission Rating (optional) Tier 2 (Tier 3, Tier4) Engine / Optional Cummins 4BT3.9 / 4BT4.5 / 3B.3 Displacement L (cu. In) 3.9(238) Net Power kW (Hp) @ 2,200 rpm 74(99) / 60(80) / 60(80) Net Peak Torque Nm (ft-lb) @ 1,500 rpm 360(266) Net Torque Rise 39% Lubrication Full-flow with spin-on filter Air Cleaner Dual-stage dry type with evacuator valve and restriction indicator on filter housing for service COOLING Fan Type Belt driven POWERTRAIN Transmission 4 speed Carraro powershift transmission with electric clutch on gear lever; electric clutch coutout switch on loader control Torque Converter Single stage, dual phase Max. -

Earthmoving Construction Automation with Military Applications: Past, Present and Future
35th International Symposium on Automation and Robotics in Construction (ISARC 2018) Earthmoving Construction Automation with Military Applications: Past, Present and Future Q.P. Haa, L. Yenb, and C. Balaguerc a Faculty of Engineering and IT, University of Technology Sydney, NSW 2007, Australia b Land Vehicles & Systems, Defence Science & Technology Group, SA 5111, Australia c Robotics Lab, Universidad Carlos III de Madrid, Spain E-mail: { [email protected] ; [email protected]; [email protected] } Abstract – Amongst increasing innovations in autonomy of construction plant, in both civilian and frontier engineering sciences, the advancements in military domains, to improve their efficiency, Robotic and Autonomous Systems (RAS) has productivity, quality and reliability [7]. brought about a new horizon in construction Robotic and autonomous systems tailored for the applications. There is evidence of the increasing military call upon the ability to integrate sensors, vision interest in RAS technologies in the civil construction imaging, actuators, end-effector manipulation, computer sector being reflected in construction efforts of many control and human interface for operations in military forces. In particular, Army or ground-based unstructured, difficult and hazardous conditions. Army forces are frequently called upon to conduct construction tasks for enhancing force protection construction tasks as part of military operations, include such earthmoving tasks as filling of protective tasks which could be partially or fully aided by the barriers (HESCO baskets), building dirt bunding employment of RAS technologies. Along with recent structures, as well as anti-tank ditches and trenching. advances in the Internet of Things (IoT) and cyber- For such tasks a variety of heavy construction physical system infrastructure, it is essential to machinery such as excavators, bulldozers, wheel loaders, examine the current maturity, technical feasibility, graders and articulated dump trucks etc. -

Resume PL Word 2.Pages
Hunner Moody 2661 North Goshen Rd, Goshen AL, 36035 334-372-6504 [email protected] Education: 1) Luverne High School • High School Diploma • Graduated 2010 2) Enterprise-Ozark Community College/Alabama Aviation Center • Airframe Technology Certificate • Graduated 2011 • Sheet Metal Experience • Knowledge of sheet metal tools such as: shears, brakes, slip rollers, rivet guns, and counter- sinks. • Experience reading and interpreting electrical diagrams. • Experience using calibrated measuring tools such as: calipers and depth guages. • Experience working with and forming aircraft fuel lines. • Experience assembling and rigging control cables for aircraft control systems. • Experience locating weight and center of gravity for loaded and unloaded aircraft. • Knowledge of aircraft brake systems. • Knowledge of aircraft hydraulic systems. Work Experience: 1) Troy Construction. 03/2020-07/2020 • Operator of heavy machinery such as Excavator, Bulldozer, Backhoe, etc. • Experience using safety equipment such as: safety glasses, gloves, and respirator. • Responsible for keeping all paperwork and documents recorded properly. • Participates in daily Job Safety Assessment meetings. • Participates in monthly company-wide Safety meetings. • Experience maintaining machinery such as: greasing when needed, adding oil or antifreeze, minor repairs, etc. • Experience reading and interpreting Right of Way drawing. • Very common to be away from home for months at a time. 2) Absolute Pipeline Integrity. 11/2018-09/2019 • Operator of heavy machinery such as Excavator, Bulldozer, Backhoe, etc. • Experience using safety equipment such as: safety glasses, gloves, and respirator. • Responsible for keeping all paperwork and documents recorded properly. • Participates in daily Job Safety Assessment meetings. • Participates in monthly company-wide Safety meetings. • Experience maintaining machinery such as: greasing when needed, adding oil or antifreeze, minor repairs, etc. -
Loader Backhoes/Tractor Loader
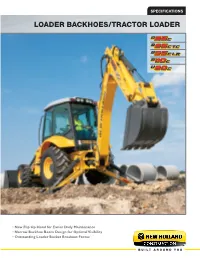
SPECIFICATIONS LOADER BACKHOES/TRACTOR LOADER • New Flip Up Hood for Easier Daily Maintenance • Narrow Backhoe Boom Design for Optimal Visibility • Outstanding Loader Bucket Breakout Forces B95C SPECIFICATIONS J O L B P D M N G 23° E C K F H A I DIMENSIONS A. Transport length, ft/in (mm) 23’ 0” (7030) G. Bucket Rollback B. Transport height, ft/in (mm) 12’ 6” (3810) At ground level 39˚ C. Wheelbase, in (mm) Raised 50˚ 2WD 85.6” (2175) H. Digging depth below grade, in (mm) 4” (100) 4WD 85.6” (2175) I. Transport width, ft/in (mm) 7’ 6” (2300) D. Height to top of cab, ft/in (mm) 9’ 5” (2870) J. Stabilizer spread, operating, ft/in (mm) 10’ 7” (3226) E. Ground Clearance, in (mm) 15.5” (394) K. Stabilizer spread, leveling angle 14˚ F. Blade width, ft/in (mm) 7’ 5” (2250) LOADER DIMENSIONS LOADER PERFORMANCE 1.1 cu yd Heavy-Duty 1.1 cu yd Heavy-Duty General Purpose General Purpose L. Max operating height, ft/in (mm) 14’ 0” (4276) Linkage geometry straight M. Height to hinge pin, ft/in (mm) 11’ 5” (3481) Bucket breakout force, lbf (daN) 14,253 (6340) N. Dump height, ft/in (mm) 9’ 2” (2784) Lift capacity to full height, lbs (kg) 11,118 (5043) O. Max dump angle 45˚ SAE heaped capacity, cu yd (m3) 1.1 (.88) P. Reach @ 45 degree dump angle, ft/in (mm) 2’ 5” (725) SAE struck capacity, cu yd (m3) .91 (.73) Max grading angle 116˚ Bucket weight, lbs (kg) 682 (309) Unit equipped with 12-16.5 front tire, 19.5L-24 rear tire Cutting width, in (mm) 88 (2250) Cycle Raise to full height 4.4 sec Dump time 1.2 sec Lower 2.7 sec WEIGHT ENGINE Base Unit 16,008 lbs Make and model FPT F5HFL413C*A With options added Type Tier IV interim certified, electronic high 2WD -386 lbs pressure common rail, 4-cycle diesel Canopy -397 lbs Aspiration Turbocharged Aftercooled 4x1 +969 lbs Governed RPM 2500 RPM 6x1 +1,408 lbs Number of cylinders 4 Std.