NVIDIA Launches Tegra X1 Mobile Super Chip
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
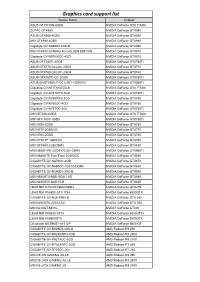
Graphics Card Support List
Graphics card support list Device Name Chipset ASUS GTXTITAN-6GD5 NVIDIA GeForce GTX TITAN ZOTAC GTX980 NVIDIA GeForce GTX980 ASUS GTX980-4GD5 NVIDIA GeForce GTX980 MSI GTX980-4GD5 NVIDIA GeForce GTX980 Gigabyte GV-N980D5-4GD-B NVIDIA GeForce GTX980 MSI GTX970 GAMING 4G GOLDEN EDITION NVIDIA GeForce GTX970 Gigabyte GV-N970IXOC-4GD NVIDIA GeForce GTX970 ASUS GTX780TI-3GD5 NVIDIA GeForce GTX780Ti ASUS GTX770-DC2OC-2GD5 NVIDIA GeForce GTX770 ASUS GTX760-DC2OC-2GD5 NVIDIA GeForce GTX760 ASUS GTX750TI-OC-2GD5 NVIDIA GeForce GTX750Ti ASUS ENGTX560-Ti-DCII/2D1-1GD5/1G NVIDIA GeForce GTX560Ti Gigabyte GV-NTITAN-6GD-B NVIDIA GeForce GTX TITAN Gigabyte GV-N78TWF3-3GD NVIDIA GeForce GTX780Ti Gigabyte GV-N780WF3-3GD NVIDIA GeForce GTX780 Gigabyte GV-N760OC-4GD NVIDIA GeForce GTX760 Gigabyte GV-N75TOC-2GI NVIDIA GeForce GTX750Ti MSI NTITAN-6GD5 NVIDIA GeForce GTX TITAN MSI GTX 780Ti 3GD5 NVIDIA GeForce GTX780Ti MSI N780-3GD5 NVIDIA GeForce GTX780 MSI N770-2GD5/OC NVIDIA GeForce GTX770 MSI N760-2GD5 NVIDIA GeForce GTX760 MSI N750 TF 1GD5/OC NVIDIA GeForce GTX750 MSI GTX680-2GB/DDR5 NVIDIA GeForce GTX680 MSI N660Ti-PE-2GD5-OC/2G-DDR5 NVIDIA GeForce GTX660Ti MSI N680GTX Twin Frozr 2GD5/OC NVIDIA GeForce GTX680 GIGABYTE GV-N670OC-2GD NVIDIA GeForce GTX670 GIGABYTE GV-N650OC-1GI/1G-DDR5 NVIDIA GeForce GTX650 GIGABYTE GV-N590D5-3GD-B NVIDIA GeForce GTX590 MSI N580GTX-M2D15D5/1.5G NVIDIA GeForce GTX580 MSI N465GTX-M2D1G-B NVIDIA GeForce GTX465 LEADTEK GTX275/896M-DDR3 NVIDIA GeForce GTX275 LEADTEK PX8800 GTX TDH NVIDIA GeForce 8800GTX GIGABYTE GV-N26-896H-B -

NVIDIA Quadro RTX for V-Ray Next
NVIDIA QUADRO RTX V-RAY NEXT GPU Image courtesy of © Dabarti Studio, rendered with V-Ray GPU Quadro RTX Accelerates V-Ray Next GPU Rendering Solutions for V-Ray Next GPU V-Ray Next GPU taps into the power of NVIDIA® Quadro® NVIDIA Quadro® provides a wide range of RTX-enabled RTX™ to speed up production rendering with dedicated RT solutions for desktop, mobile, server-based rendering, and Cores for ray tracing and Tensor Cores for AI-accelerated virtual workstations with NVIDIA Quadro Virtual Data denoising.¹ With up to 18X faster rendering than CPU-based Center Workstation (Quadro vDWS) software.2 With up to 96 solutions and enhanced performance with NVIDIA NVLink™, gigabytes (GB) of GPU memory available,3 Quadro RTX V-Ray Next GPU with RTX support provides incredible provides the power you need for the largest professional performance improvements for your rendering workloads. graphics and rendering workloads. “ Accelerating artist productivity is always our top Benchmark: V-Ray Next GPU Rendering Performance Increase on Quadro RTX GPUs priority, so we’re quick to take advantage of the latest ray-tracing hardware breakthroughs. By Quadro RTX 6000 x2 1885 ™ Quadro RTX 6000 104 supporting NVIDIA RTX in V-Ray GPU, we’re Quadro RTX 4000 783 bringing our customers an exciting new boost in PU 1 0 2 4 6 8 10 12 14 16 18 20 their GPU production rendering speeds.” Relatve Performance – Phillip Miller, Vice President, Product Management, Chaos Group Desktop performance Tests run on 1x Xeon old 6154 3 Hz (37 Hz Turbo), 64 B DDR4 RAM Wn10x64 Drver verson 44128 Performance results may vary dependng on the scene NVIDIA Quadro professional graphics solutions are verified and recommended for the most demanding projects by Chaos Group. -
GPU-Based Deep Learning Inference
Whitepaper GPU-Based Deep Learning Inference: A Performance and Power Analysis November 2015 1 Contents Abstract ......................................................................................................................................................... 3 Introduction .................................................................................................................................................. 3 Inference versus Training .............................................................................................................................. 4 GPUs Excel at Neural Network Inference ..................................................................................................... 5 Inference Optimizations in Caffe and cuDNN 4 ........................................................................................ 5 Experimental Setup and Testing Methodology ........................................................................................ 7 Inference on Small and Large GPUs .......................................................................................................... 8 Conclusion ................................................................................................................................................... 10 References .................................................................................................................................................. 10 2 Abstract Deep learning methods are revolutionizing various areas of machine perception. On a -

Co-Optimizing Performance and Memory Footprint Via Integrated CPU/GPU Memory Management, an Implementation on Autonomous Driving Platform
Co-Optimizing Performance and Memory Footprint Via Integrated CPU/GPU Memory Management, an Implementation on Autonomous Driving Platform Soroush Bateni*, Zhendong Wang*, Yuankun Zhu, Yang Hu, and Cong Liu The University of Texas at Dallas Abstract—Cutting-edge embedded system applications, such as launches the OpenVINO toolkit for the edge-based deep self-driving cars and unmanned drone software, are reliant on learning inference on its integrated HD GPUs [4]. integrated CPU/GPU platforms for their DNNs-driven workload, Despite the advantages in SWaP features presented by the such as perception and other highly parallel components. In this work, we set out to explore the hidden performance im- integrated CPU/GPU architecture, our community still lacks plication of GPU memory management methods of integrated an in-depth understanding of the architectural and system CPU/GPU architecture. Through a series of experiments on behaviors of integrated GPU when emerging autonomous and micro-benchmarks and real-world workloads, we find that the edge intelligence workloads are executed, particularly in multi- performance under different memory management methods may tasking fashion. Specifically, in this paper we set out to explore vary according to application characteristics. Based on this observation, we develop a performance model that can predict the performance implications exposed by various GPU memory system overhead for each memory management method based management (MM) methods of the integrated CPU/GPU on application characteristics. Guided by the performance model, architecture. The reason we focus on the performance impacts we further propose a runtime scheduler. By conducting per-task of GPU MM methods are two-fold. -

Nvidia Cuda Getting Started Guide for Linux
NVIDIA CUDA GETTING STARTED GUIDE FOR LINUX DU-05347-001_v7.0 | March 2015 Installation and Verification on Linux Systems TABLE OF CONTENTS Chapter 1. Introduction.........................................................................................1 1.1. System Requirements.................................................................................... 1 1.1.1. x86 32-bit Support.................................................................................. 2 1.2. About This Document.................................................................................... 3 Chapter 2. Pre-installation Actions...........................................................................4 2.1. Verify You Have a CUDA-Capable GPU................................................................ 4 2.2. Verify You Have a Supported Version of Linux.......................................................4 2.3. Verify the System Has gcc Installed................................................................... 5 2.4. Choose an Installation Method......................................................................... 5 2.5. Download the NVIDIA CUDA Toolkit....................................................................6 2.6. Handle Conflicting Installation Methods.............................................................. 6 Chapter 3. Package Manager Installation....................................................................8 3.1. Overview.................................................................................................. -

A Low-Cost Deep Neural Network-Based Autonomous Car
DeepPicar: A Low-cost Deep Neural Network-based Autonomous Car Michael G. Bechtely, Elise McEllhineyy, Minje Kim?, Heechul Yuny y University of Kansas, USA. fmbechtel, elisemmc, [email protected] ? Indiana University, USA. [email protected] Abstract—We present DeepPicar, a low-cost deep neural net- task may be directly linked to the safety of the vehicle. This work based autonomous car platform. DeepPicar is a small scale requires a high computing capacity as well as the means to replication of a real self-driving car called DAVE-2 by NVIDIA. guaranteeing the timings. On the other hand, the computing DAVE-2 uses a deep convolutional neural network (CNN), which takes images from a front-facing camera as input and produces hardware platform must also satisfy cost, size, weight, and car steering angles as output. DeepPicar uses the same net- power constraints, which require a highly efficient computing work architecture—9 layers, 27 million connections and 250K platform. These two conflicting requirements complicate the parameters—and can drive itself in real-time using a web camera platform selection process as observed in [25]. and a Raspberry Pi 3 quad-core platform. Using DeepPicar, we To understand what kind of computing hardware is needed analyze the Pi 3’s computing capabilities to support end-to-end deep learning based real-time control of autonomous vehicles. for AI workloads, we need a testbed and realistic workloads. We also systematically compare other contemporary embedded While using a real car-based testbed would be most ideal, it computing platforms using the DeepPicar’s CNN-based real-time is not only highly expensive, but also poses serious safety control workload. -

Cuda C Programming Guide
CUDA C PROGRAMMING GUIDE PG-02829-001_v10.0 | October 2018 Design Guide CHANGES FROM VERSION 9.0 ‣ Documented restriction that operator-overloads cannot be __global__ functions in Operator Function. ‣ Removed guidance to break 8-byte shuffles into two 4-byte instructions. 8-byte shuffle variants are provided since CUDA 9.0. See Warp Shuffle Functions. ‣ Passing __restrict__ references to __global__ functions is now supported. Updated comment in __global__ functions and function templates. ‣ Documented CUDA_ENABLE_CRC_CHECK in CUDA Environment Variables. ‣ Warp matrix functions now support matrix products with m=32, n=8, k=16 and m=8, n=32, k=16 in addition to m=n=k=16. www.nvidia.com CUDA C Programming Guide PG-02829-001_v10.0 | ii TABLE OF CONTENTS Chapter 1. Introduction.........................................................................................1 1.1. From Graphics Processing to General Purpose Parallel Computing............................... 1 1.2. CUDA®: A General-Purpose Parallel Computing Platform and Programming Model.............3 1.3. A Scalable Programming Model.........................................................................4 1.4. Document Structure...................................................................................... 5 Chapter 2. Programming Model............................................................................... 7 2.1. Kernels......................................................................................................7 2.2. Thread Hierarchy........................................................................................ -

Developing & Deploying Autonomous Driving
DEVELOPING & DEPLOYING AUTONOMOUS DRIVING APPLICATIONS WITH THE NVIDIA DRIVE PX PLATFORM Shri Sundaram, Product Manager, DRIVE PX Platform DRIVE PX: AV Development Platform AV Developers: DRIVE PX as your tool AV HW/SW Ecosystem: DRIVE PX as your platform to reach developers 2 NVIDIA DRIVE PX Open AV Computing Platform for the Transportation Industry Powerful and scalable AV computer Deep Neural Network, Sensor Fusion and Computing Extensive I/O to interface with wide range of sensors and vehicle networks An open SW stack Level 3 to Level 5; ASIL-D functional safety 3 DRIVE PX DRIVING AV AI DRIVE Platform Engagements 400 350 300 250 Launched CES 2015 200 150 Spike in AV AI engagements after 100 50 we powered on discrete GPU 0 FY18 Q1 FY18 Q3 More than doubled in last 6 months Plus >145 AV Startups on NVIDIA DRIVE Source: NVIDIA statistics 4 AV DEVELOPMENT Path from Idea to Production IDEA DEVELOPMENT PROTOTYPE PRODUCTION Develop Test Deploy Perception Feature development Safety hardening OBJECTIVE Mapping/Localization Validation Performance tuning Path Planning SW upgrades Combination/More… PC PC DRIVE Platform TOOL Automotive Sensors Production SW OTA framework Scalable compute with discrete GPUs Ecosystem of sensors + other HW/SW peripherals TensorRT, CUDA, Open Source Frameworks 5 Autonomous Vehicle DEVELOPMENT FLOW Application Development 4 Using DRIVE PX Platform Test/Drive 3 1 Data Acquired Curated/Annotated Neural Network Deep Neural From Sensors Training Data Training Network Autonomous Vehicle Applications 2 1 Data Acquisition -

Diseño De Un Prototipo Electrónico Para El Control Automático De La Luz Alta De Un Vehículo Mediante Detección Inteligente De Otros Automóviles.”
Tecnológico de Costa Rica Escuela Ingeniería Electrónica Proyecto de Graduación “Diseño de un prototipo electrónico para el control automático de la luz alta de un vehículo mediante detección inteligente de otros automóviles.” Informe de Proyecto de Graduación para optar por el título de Ingeniero en Electrónica con el grado académico de Licenciatura Ronald Miranda Arce San Carlos, 2018 2 Declaración de autenticidad Yo, Ronald Miranda Arce, en calidad de estudiante de la carrera de ingeniería Electrónica, declaro que los contenidos de este informe de proyecto de graduación son absolutamente originales, auténticos y de exclusiva responsabilidad legal y académica del autor. Ronald Fernando Miranda Arce Santa Clara, San Carlos, Costa Rica Cédula: 207320032 3 Resumen Se presenta el diseño y prueba de un prototipo electrónico para el control automático de la luz alta de un vehículo mediante la detección inteligente de otros automóviles, de esta forma mejorar la experiencia de manejo y seguridad al conducir en la noche, disminuyendo el riesgo de accidentes por deslumbramiento en las carreteras. Se expone el uso de machine learning (máquina de aprendizaje automático) para el entrenamiento de una red neuronal, que permita el reconocimiento en profundidad de patrones, en este caso identificar el patrón que describe un vehículo cuando se acerca durante la noche. Se entrenó exitosamente una red neuronal capaz de identificar correctamente hasta un 89% de los casos ocurridos en las pruebas realizadas, generando las señales para controlar de forma automática los cambios de luz. 4 Summary The design and testing of an electronic prototype for the automatic control of the vehicle's high light through the intelligent detection of other automobiles is presented. -
NVIDIA Ampere GA102 GPU Architecture Whitepaper
NVIDIA AMPERE GA102 GPU ARCHITECTURE Second-Generation RTX Updated with NVIDIA RTX A6000 and NVIDIA A40 Information V2.0 Table of Contents Introduction 5 GA102 Key Features 7 2x FP32 Processing 7 Second-Generation RT Core 7 Third-Generation Tensor Cores 8 GDDR6X and GDDR6 Memory 8 Third-Generation NVLink® 8 PCIe Gen 4 9 Ampere GPU Architecture In-Depth 10 GPC, TPC, and SM High-Level Architecture 10 ROP Optimizations 11 GA10x SM Architecture 11 2x FP32 Throughput 12 Larger and Faster Unified Shared Memory and L1 Data Cache 13 Performance Per Watt 16 Second-Generation Ray Tracing Engine in GA10x GPUs 17 Ampere Architecture RTX Processors in Action 19 GA10x GPU Hardware Acceleration for Ray-Traced Motion Blur 20 Third-Generation Tensor Cores in GA10x GPUs 24 Comparison of Turing vs GA10x GPU Tensor Cores 24 NVIDIA Ampere Architecture Tensor Cores Support New DL Data Types 26 Fine-Grained Structured Sparsity 26 NVIDIA DLSS 8K 28 GDDR6X Memory 30 RTX IO 32 Introducing NVIDIA RTX IO 33 How NVIDIA RTX IO Works 34 Display and Video Engine 38 DisplayPort 1.4a with DSC 1.2a 38 HDMI 2.1 with DSC 1.2a 38 Fifth Generation NVDEC - Hardware-Accelerated Video Decoding 39 AV1 Hardware Decode 40 Seventh Generation NVENC - Hardware-Accelerated Video Encoding 40 NVIDIA Ampere GA102 GPU Architecture ii Conclusion 42 Appendix A - Additional GeForce GA10x GPU Specifications 44 GeForce RTX 3090 44 GeForce RTX 3070 46 Appendix B - New Memory Error Detection and Replay (EDR) Technology 49 Appendix C - RTX A6000 GPU Perf ormance 50 List of Figures Figure 1. -

Geforce® Gtx 680 2Gb Vcggtx680xpb
FILENAME: PNY-GeForce-GTX-680-2GB MODIFIED: April 25, 2013 12:02 PM GEFORCE® GTX 680 2GB VCGGTX680XPB Game-Changing Innovation PRODUCT SPECIFICATIONS: PRODUCT SPECIFICATIONS The GeForce® GTX 680 delivers more than just state-of-the-art features and technology. It gives you truly GPU GeForce® GTX 680 ® gaming-changing performance that taps into the power next generation GeForce Kepler-architecture to CUDA Cores 1536 redefine smooth, seamless, lifelike gaming. NVIDIA GPU Boost technology that dynamically maximize clock speeds to push performance to the new levels and bring out the best in every game. Ultra-smooth Core Speed 1006 MHz gaming with exciting new NVIDIA Adaptive V-Sync technology. Boost Speed 1058 MHz Memory Size 2048 MB GDDR5 PACKAGE INCLUDES REQUIREMENTS Memory • GeForce® GTX 680 2GB graphics card • PCI Express compliant motherboard with one 256 bit Interface • Quick Installation Guide dual-width x16 graphics slot • Installation DVD, which includes: • Two 6-pin PCI Express supplementary Memory 6.0 Gbps Detailed installation guide power connectors Frequency ® - NVIDIA Graphics Drivers • Minimum 550W or greater system power supply TDP 195W-Active - NVIDIA® GeForce® Demos (with a minimum 12V current rating of 38A) - PhysX™ System Software • 300 MB of available hard-disk space 2GB SLI 3-Way SLI • DVI-to-VGA adapter system memory (2GB or higher recommended) 4 Concurrent Screens*** Multi-Screen • 6-pin PCIe to Molex Power Adapter • Microsoft Windows 7, Windows Vista, or NVIDIA 3D Surround* Windows XP Operating System (32 or 64-bit) -

Introduction 3 Acknowledgement 3 Problem and Project Statement 3
Introduction 3 Acknowledgement 3 Problem and Project Statement 3 Operational environment 5 Intended uses and users 5 Assumptions and limitations 6 End Product 7 Specifications and analysis 9 Proposed Design 9 Design Analysis 10 Implementation details 10 Testing process and testing results 11 Placing your work in the context of: 21 • Related products 21 • Related literature If/When needed, you should resort to Appendices. 22 Appendix I – Operation Manual 23 Raspberry PI 3 Model B 23 Nvidia Drive PX2 29 Software Licensing 31 Appendix II: Alternative/ other initial versions of the design 32 1) The DSRC 32 2) The Mobile Wireless Data 32 3) The Arduino & XBEE 32 Appendix III: Other Considerations 34 Appendix IV: Code 35 Introduction 35 External Libraries 35 Native Libraries 35 Gather Component Information 35 Finding and Initializing Devices 36 Initialize The GPS 37 Parsing and Transmission 37 Introduction As part of our senior design we had to create the means for the communication between two vehicles. The information that had to be communicated was the latitude, longitude coordinates, and the time. For this we have come up with several solutions throughout our design and testing process. We looked into DSRC, Cellular Communication, Raspberry Pi’s over a LAN network, and Xbee transceivers. All these are viable options and several can complement the others pretty well. We will have more details in following sections. Acknowledgement First off, we would like to formally thank Dr. Hegde for guidance on our project and the insightful advice on how to approach and overcome different obstacles of our progress. Also we would like to thank Vishal as our project manager who made sure we stuck to our milestones and meeting with us every week to make sure we were working towards our goals.