Health Monitoring System with Hybrid Laser Sensor Networks and Cloud
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Annual Report 2018 Annual Report 2018 3 Awards & Accolades
Stock Code: 12 ANNUAL REPORT 2 0 18 Corporate Profile Founded in 1976 by its Chairman, Dr The Honourable Lee Shau Kee, GBM, Henderson Land Development Company Limited is a leading property group with a focus on Hong Kong and mainland China. Its core businesses comprise property development and property investment. In addition, it has direct equity interests in a listed subsidiary, Henderson Investment Limited, and three listed associates, The Hong Kong and China Gas Company Limited (which in turn has equity stakes in a listed subsidiary, Towngas China Company Limited), Hong Kong Ferry (Holdings) Company Limited and Miramar Hotel and Investment Company, Limited. Henderson Land has been listed in Hong Kong since 1981 where it is one of the largest property groups. As at 31 December 2018, Henderson Land had a market capitalisation of HK$172 billion and the combined market capitalisation of the Company, its listed subsidiary and its associates was about HK$453 billion. The Company is vertically integrated, with project management, construction, property management, and financial services supporting its core businesses. In all aspects of its operations, Henderson Land strives to add value for its shareholders, customers and the community through its commitment to excellence in product quality and service delivery as well as a continuous focus on sustainability and the environment. Contents Inside front Corporate Profile 2 Land Bank – Hong Kong and Mainland China 4 Awards & Accolades 6 Group Structure 7 Highlights of 2018 Final Results 10 Chairman’s -

5G for Trains
5G for Trains Bharat Bhatia Chair, ITU-R WP5D SWG on PPDR Chair, APT-AWG Task Group on PPDR President, ITU-APT foundation of India Head of International Spectrum, Motorola Solutions Inc. Slide 1 Operations • Train operations, monitoring and control GSM-R • Real-time telemetry • Fleet/track maintenance • Increasing track capacity • Unattended Train Operations • Mobile workforce applications • Sensors – big data analytics • Mass Rescue Operation • Supply chain Safety Customer services GSM-R • Remote diagnostics • Travel information • Remote control in case of • Advertisements emergency • Location based services • Passenger emergency • Infotainment - Multimedia communications Passenger information display • Platform-to-driver video • Personal multimedia • In-train CCTV surveillance - train-to- entertainment station/OCC video • In-train wi-fi – broadband • Security internet access • Video analytics What is GSM-R? GSM-R, Global System for Mobile Communications – Railway or GSM-Railway is an international wireless communications standard for railway communication and applications. A sub-system of European Rail Traffic Management System (ERTMS), it is used for communication between train and railway regulation control centres GSM-R is an adaptation of GSM to provide mission critical features for railway operation and can work at speeds up to 500 km/hour. It is based on EIRENE – MORANE specifications. (EUROPEAN INTEGRATED RAILWAY RADIO ENHANCED NETWORK and Mobile radio for Railway Networks in Europe) GSM-R Stanadardisation UIC the International -
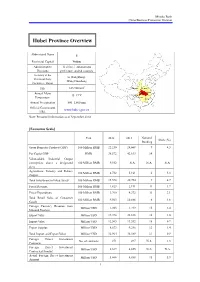
Hubei Province Overview
Mizuho Bank China Business Promotion Division Hubei Province Overview Abbreviated Name E Provincial Capital Wuhan Administrative 12 cities, 1 autonomous Divisions prefecture, and 64 counties Secretary of the Li Hongzhong; Provincial Party Wang Guosheng Committee; Mayor 2 Size 185,900 km Shaanxi Henan Annual Mean Hubei Anhui 15–17°C Chongqing Temperature Hunan Jiangxi Annual Precipitation 800–1,600 mm Official Government www.hubei.gov.cn URL Note: Personnel information as of September 2014 [Economic Scale] Unit 2012 2013 National Share (%) Ranking Gross Domestic Product (GDP) 100 Million RMB 22,250 24,668 9 4.3 Per Capita GDP RMB 38,572 42,613 14 - Value-added Industrial Output (enterprises above a designated 100 Million RMB 9,552 N.A. N.A. N.A. size) Agriculture, Forestry and Fishery 100 Million RMB 4,732 5,161 6 5.3 Output Total Investment in Fixed Assets 100 Million RMB 15,578 20,754 9 4.7 Fiscal Revenue 100 Million RMB 1,823 2,191 11 1.7 Fiscal Expenditure 100 Million RMB 3,760 4,372 11 3.1 Total Retail Sales of Consumer 100 Million RMB 9,563 10,886 6 4.6 Goods Foreign Currency Revenue from Million USD 1,203 1,219 15 2.4 Inbound Tourism Export Value Million USD 19,398 22,838 16 1.0 Import Value Million USD 12,565 13,552 18 0.7 Export Surplus Million USD 6,833 9,286 12 1.4 Total Import and Export Value Million USD 31,964 36,389 17 0.9 Foreign Direct Investment No. -

China Clean Energy Study Tour for Urban Infrastructure Development
China Clean Energy Study Tour for Urban Infrastructure Development BUSINESS ROUNDTABLE Tuesday, August 13, 2019 Hyatt Centric Fisherman’s Wharf Hotel • San Francisco, CA CONNECT WITH USTDA AGENDA China Urban Infrastructure Development Business Roundtable for U.S. Industry Hosted by the U.S. Trade and Development Agency (USTDA) Tuesday, August 13, 2019 ____________________________________________________________________ 9:30 - 10:00 a.m. Registration - Banquet AB 9:55 - 10:00 a.m. Administrative Remarks – KEA 10:00 - 10:10 a.m. Welcome and USTDA Overview by Ms. Alissa Lee - Country Manager for East Asia and the Indo-Pacific - USTDA 10:10 - 10:20 a.m. Comments by Mr. Douglas Wallace - Director, U.S. Department of Commerce Export Assistance Center, San Francisco 10:20 - 10:30 a.m. Introduction of U.S.-China Energy Cooperation Program (ECP) Ms. Lucinda Liu - Senior Program Manager, ECP Beijing 10:30 a.m. - 11:45 a.m. Delegate Presentations 10:30 - 10:45 a.m. Presentation by Professor ZHAO Gang - Director, Chinese Academy of Science and Technology for Development 10:45 - 11:00 a.m. Presentation by Mr. YAN Zhe - General Manager, Beijing Public Transport Tram Corporation 11:00 - 11:15 a.m. Presentation by Mr. LI Zhongwen - Head of Safety Department, Shenzhen Metro 11:15 - 11:30 a.m. Tea/Coffee Break 11:30 - 11:45 a.m. Presentation by Ms. WANG Jianxin - Deputy General Manager, Tianjin Metro Operation Corporation 11:45 a.m. - 12:00 p.m. Presentation by Mr. WANG Changyu - Director of General Engineer's Office, Wuhan Metro Group 12:00 - 12:15 p.m. -

Use Style: Paper Title
2019 4th International Conference on Education and Social Development (ICESD 2019) ISBN: 978-1-60595-621-3 Wuhan Subway Economic Development in the Perspective of "Innovation, Coordination, Green, Open, Sharing" Concept 1,a 2,b, Fang WANG and Xiao-sheng LEI * 1Hubei University of Traditional Chinese Medicine, Wuhan, Hubei, China 2Hubei University of Traditional Chinese Medicine, Wuhan, Hubei, China [email protected], [email protected] *Corresponding author Keywords: Development Concept, Wuhan, Subway Economy. Abstract. Since the 18th congress of the communist party of China, the "innovation, coordination, green, open and shared" development concept has been a profound change in the overall situation of China's development. In this context, the Wuhan Metro has developed rapidly, This paper analyzes the current situation, characteristics and influence of the development of subway economy in Wuhan from the perspective of development concept, and puts forward some suggestions for the future development of subway economy. Introduction For a long time, China has faced problems such as uneven, inadequate, uncoordinated and unsustainable development, and it has already faced the "ceiling dilemma". In recent years, China is facing the downward pressure of the economy. In order to change the development mode and solve the development problems, the 18th National Congress put forward five development concepts of “innovation, coordination, green, openness and sharing”, which have important guidance for the future development of social economy. Xiong'an New District is an innovative, coordinated, green ecological, open and co-constructed shared future urban model. Wuhan, following the glory of history, is becoming a reactivated city, and it must follow this development philosophy. -

METROS/U-BAHN Worldwide
METROS DER WELT/METROS OF THE WORLD STAND:31.12.2020/STATUS:31.12.2020 ّ :جمهورية مرص العرب ّية/ÄGYPTEN/EGYPT/DSCHUMHŪRIYYAT MISR AL-ʿARABIYYA :القاهرة/CAIRO/AL QAHIRAH ( حلوان)HELWAN-( المرج الجديد)LINE 1:NEW EL-MARG 25.12.2020 https://www.youtube.com/watch?v=jmr5zRlqvHY DAR EL-SALAM-SAAD ZAGHLOUL 11:29 (RECHTES SEITENFENSTER/RIGHT WINDOW!) Altamas Mahmud 06.11.2020 https://www.youtube.com/watch?v=P6xG3hZccyg EL-DEMERDASH-SADAT (LINKES SEITENFENSTER/LEFT WINDOW!) 12:29 Mahmoud Bassam ( المنيب)EL MONIB-( ش ربا)LINE 2:SHUBRA 24.11.2017 https://www.youtube.com/watch?v=-UCJA6bVKQ8 GIZA-FAYSAL (LINKES SEITENFENSTER/LEFT WINDOW!) 02:05 Bassem Nagm ( عتابا)ATTABA-( عدىل منصور)LINE 3:ADLY MANSOUR 21.08.2020 https://www.youtube.com/watch?v=t7m5Z9g39ro EL NOZHA-ADLY MANSOUR (FENSTERBLICKE/WINDOW VIEWS!) 03:49 Hesham Mohamed ALGERIEN/ALGERIA/AL-DSCHUMHŪRĪYA AL-DSCHAZĀ'IRĪYA AD-DĪMŪGRĀTĪYA ASCH- َ /TAGDUDA TAZZAYRIT TAMAGDAYT TAỴERFANT/ الجمهورية الجزائرية الديمقراطيةالشعبية/SCHA'BĪYA ⵜⴰⴳⴷⵓⴷⴰ ⵜⴰⵣⵣⴰⵢⵔⵉⵜ ⵜⴰⵎⴰⴳⴷⴰⵢⵜ ⵜⴰⵖⴻⵔⴼⴰⵏⵜ : /DZAYER TAMANEỴT/ دزاير/DZAYER/مدينة الجزائر/ALGIER/ALGIERS/MADĪNAT AL DSCHAZĀ'IR ⴷⵣⴰⵢⴻⵔ ⵜⴰⵎⴰⵏⴻⵖⵜ PLACE DE MARTYRS-( ع ني نعجة)AÏN NAÂDJA/( مركز الحراش)LINE:EL HARRACH CENTRE ( مكان دي مارت بز) 1 ARGENTINIEN/ARGENTINA/REPÚBLICA ARGENTINA: BUENOS AIRES: LINE:LINEA A:PLACA DE MAYO-SAN PEDRITO(SUBTE) 20.02.2011 https://www.youtube.com/watch?v=jfUmJPEcBd4 PIEDRAS-PLAZA DE MAYO 02:47 Joselitonotion 13.05.2020 https://www.youtube.com/watch?v=4lJAhBo6YlY RIO DE JANEIRO-PUAN 07:27 Así es BUENOS AIRES 4K 04.12.2014 https://www.youtube.com/watch?v=PoUNwMT2DoI -

Ozone and Fine Particle in the Western Yangtze River Delta: an Overview Of
Atmos. Chem. Phys. Discuss., 13, C673–C680, 2013 Atmospheric www.atmos-chem-phys-discuss.net/13/C673/2013/ Chemistry © Author(s) 2013. This work is distributed under and Physics the Creative Commons Attribute 3.0 License. Discussions Interactive comment on “Ozone and fine particle in the western Yangtze River Delta: an overview of 1-yr data at the SORPES station” by A. J. Ding et al. Anonymous Referee #1 Received and published: 19 March 2013 General comments: The manuscript shows a 1 year data series of trace gases and PM2.5 observations in the recently set up SORPES station in East China. The site is under influence of urban and biomass burning emissions, being an interesting location to study the interactions between surface emissions and pollution transport. The dataset is of good quality and the data analysis consistent. I recommend publication in ACP after minor revisions, according to the following comments. Specific comments: 1. Section 2.1: You did not mention the construction works in the campus (Herman et C673 al., 2013). This could be a significant source or aerosols. Please discuss the potential impact on your results. 2. Page 2840, lines 11-13: It would be great to give the reader an idea of spatial distances, either by adding a length scale to Figure 1c, or by mentioning distances in the text. 3. Page 2840, line 19: what was the measurement height? 40 m above ground level? Or 40 m above the surrounding landscape? 4. Section 2.1: How about meteorological measurements? What equipment was used, and which variables were measured? 5. -

High-Resolution (0.05°X0.05°) Nox Emissions in the Yangtze River Delta Inferred from OMI”
Review “High-resolution (0.05°x0.05°) NOx emissions in the Yangtze River delta inferred from OMI” The manuscript entitled ‘High-resolution (0.05◦×0.05◦) NOx emissions in the Yangtze River Delta inferred from OMI’ presents an inventive method to estimate NOx emissions on a high resolution from satellite observations. The topic is interesting and important. Important aspect is also the error analysis that has been described in detail. However, before the paper gets published, the manuscript can be improved a lot by adding more discussion of the results including the relation to other existing inventories, and the description of method should be rephrased in a clearer way. General remarks This inventory is presented as the only high resolution inventory for the YRD region, but in the MarcoPolo-Panda project, a high resolution emission inventory of 0.01 degree resolution has been developed for this region (see http://www.marcopolo-panda.eu/products/toolbox/emission-data/) Since the affiliations of the authors were also participating in the MarcoPolo-Panda project it is surprising that this inventory is not mentioned or used in their comparisons. Also Zhao et al. (2015) present a city-scale emission inventory with the resolution of 3kmx3km in Nanjing, in the Yangtze River Delta.: Zhao, Y., Qiu, L. P., Xu, R. Y., Xie, F. J., Zhang, Q., Yu, Y. Y., Nielsen, C. P., Qin, H. X., Wang, H. K., Wu, X. C., Li, W. Q., and Zhang, J.: Advantages of a city-scale emission inventory for urban air quality research and policy: the case of Nanjing, a typical industrial city in the Yangtze River Delta, China, Atmos. -

Capitamalls Asia Limited
CapitaMalls Asia Limited Asia’s Leading Mall Developer, Owner and Manager Singapore • China • Malaysia • Japan • India CMA Awarded Prime Site for Shopping Mall in Wuhan 15 January 2013 CMA Awarded Prime Site for Shopping Mall in Wuhan *Jan 2013* Disclaimer This presentation may contain forward-looking statements that involve assumptions, risks and uncertainties. Actual future performance, outcomes and results may differ materially from those expressed in forward- looking statements as a result of a number of risks, uncertainties and assumptions. Representative examples of these factors include (without limitation) general industry and economic conditions, interest rate trends, cost of capital and capital availability, competition from other developments or companies, shifts in expected levels of occupancy rate, property rental income, charge out collections, changes in operating expenses (including employee wages, benefits and training costs), governmental and public policy changes and the continued availability of financing in the amounts and the terms necessary to support future business. You are cautioned not to place undue reliance on these forward-looking statements, which are based on the current view of management on future events. The information contained in this presentation has not been independently verified. No representation or warranty expressed or implied is made as to, and no reliance should be placed on, the fairness, accuracy, completeness or correctness of the information or opinions contained in this presentation. Neither CapitaMalls Asia (“CMA”) or any of its affiliates, advisers or representatives shall have any liability whatsoever (in negligence or otherwise) for any loss howsoever arising, whether directly or indirectly, from any use, reliance or distribution of this presentation or its contents or otherwise arising in connection with this presentation. -

ANNUAL REPORT 2018 CHINA CITY INFRASTRUCTURE GROUP LIMITED Annual Report 2018
(Incorporated in the Cayman Islands with limited liability) Stock Code: 2349 ANNUAL REPORT 2018 CHINA CITY INFRASTRUCTURE GROUP LIMITED Annual Report 2018 CONTENTS Corporate Information 2 Corporate Profile 3 Chairman’s Statement 4 Management Discussion and Analysis 5 Directors’ and Senior Management Biographical Details 14 Directors’ Report 17 Environmental, Social and Governance Report 26 Corporate Governance Report 39 Independent Auditor’s Report 52 Consolidated Statement of Profit or Loss 61 Consolidated Statement of Profit or Loss and Other Comprehensive Income 62 Consolidated Statement of Financial Position 63 Consolidated Statement of Changes in Equity 65 Consolidated Statement of Cash Flows 67 Notes to the Consolidated Financial Statements 69 Financial Summary 173 Properties Particulars 174 1 CORPORATE INFORMATION CHINA CITY INFRASTRUCTURE GROUP LIMITED Annual Report 2018 CORPORATE INFORMATION BOARD OF DIRECTORS AUDITOR Executive Directors HLM CPA Limited Mr. Li Chao Bo Certified Public Accountants (Chairman and Chief Executive Officer) Mr. Ji Jiaming WEBSITE Ms. Wang Wenxia www.city-infrastructure.com (Vice Chairman and Chief Executive Officer) (resigned on 31 May 2018) REGISTERED OFFICE Cricket Square Non-executive Director Hutchins Drive Mr. Zhang Guiqing P.O. Box 2681 Grand Cayman, KY1-1111 Independent non-executive Directors Cayman Islands Mr. Wang Jian PRINCIPAL BANKERS Mr. Ng Chi Ho, Dennis Chiyu Banking Corporation Limited Mr. Ji Yehong No. 78 Des Voeux Road Central AUDIT COMMITTEE Hong Kong Mr. Ng Chi Ho, Dennis (Committee Chairman) DBS Bank (Hong Kong) Limited Mr. Wang Jian 16th Floor, The Center Mr. Ji Yehong No. 99 Queen’s Road Central Hong Kong REMUNERATION COMMITTEE Mr. Ji Yehong (Committee Chairman) The Hongkong and Shanghai Banking Mr. -

Minfeng Raw Water Conveyors Project
World Bank- APL3 Shanghai Urban Environment Project Public Disclosure Authorized Shanghai District Financing Vehicle (DFV) Subproject-- Minfeng Raw Water Conveyors Project Public Disclosure Authorized Environmental Assessment Executive Summary Public Disclosure Authorized Project owner: SHANGHAI CHENGTOU RAW WATER CO.LTD Loan management unit: SHANGHAI CHENGTOU ENVIRONMENT ASSET Public Disclosure Authorized MANAGEMENT CO.LTD. Preparation unit: SHANGHAI INVESTIGATION, DESIGN & RESEARCH INSTITUTE December 2014 EA Executive Summary of DFV Subproject –Minfeng Raw Water Conveyors Project Contents 1 INTRODUCTION .............................................................................................................. - 1- 2 PROJECT BACKGROUND AND DESCRIPTION .......................................................... - 3- 3 REGULATORY FRAMEWORK ANALYSIS.................................................................... - 8 - 3.1 Requirement of Safety Guarantee Policies of the World Bank ............................... - 8 - 3.2 Domestic Laws and Regulations ............................................................................. - 9 - 4 ALTERNATIVE COMPARISON ANALYSIS ................................................................. - 12 - 4.1 non-active Alternative Analysis .............................................................................. - 12 - 4.2 Water Supply Comparison ..................................................................................... - 14 - 4.3 Alternative Comparison Analysis of Water Conveyance -

2019-Shanghai Basic Facts
SHANGHAI BASIC FACTS 2019 Editorial Board Adviser: Zhou Huilin, Zhu Yonglei Editors-in-Chief: Xu Wei, Zhou Ya, Tang Huihao Deputy Editors-in-Chief: Yin Xin, Chen Yongqi, Qian Fei Editor: Cao Meifang SHANGHAI BASIC FACTS 2019 Compiled by: Information Office of Shanghai Municipality Shanghai Municipal Statistics Bureau ZHONGXI BOOK COMPANY SHANGHAI Located at the estuary of the Yangtze River in eastern China and facing the Pacific Ocean, Shanghai sprawls across an area of over 6,340.5 square kilometers with a population of 24.2378 million in 2018. Shanghai is China’s most thriving economic center, with GDP per capita climbing to US$20,398 by the end of 2018. Shanghai is a pioneer in China’s reform and opening- up, as well as innovation. A total of 670 multinational enterprises have set up regional headquarters in the city, and 441 foreign- invested R&D centers have also been established here. Shanghai is one of the world’s financial centers with its financial markets generating a total transaction volume of 1,645.78 trillion yuan and trading volumes of several products ranked top among global markets. An RMB products center, which matches the currency’s international status, has taken form in the city. Shanghai is an important shipping center, handling 730.4794 million tons of goods in 2018. On top of that, its international container volume reached 42.0102 million TEUs, the highest in the world for nine straight years. When it comes to the number of cruise ship passengers, the city ranked fourth in the world. Some 771,600 flights were processed at Shanghai Pudong and Hongqiao international airports, reaching 117.6343 million inbound and outbound trips.