Thermodynamic Profiling Technologies Workshop Report to the National Science Foundation and the National Weather Service
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
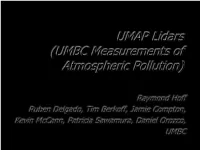
UMAP Lidars (UMBC Measurements of Atmospheric Pollution)
UMAP Lidars (UMBC Measurements of Atmospheric Pollution) Raymond Hoff Ruben Delgado, Tim Berkoff, Jamie Compton, Kevin McCann, Patricia Sawamura, Daniel Orozco, UMBC October 5 , 2010 DISCOVR-AQ Engel-Cox, J. et.al. 2004. Atmospheric Environment. Baltimore, MD Summer 2004 100 1.6 90 Old Town TEOMPM2.5 MODIS 1.4 80 MODIS AOD July 21 ) 1.2 3 70 Mixed down July 9 smoke 1 g/m 60 High altitude µ ( smoke 50 0.8 (g ) AOD 2.5 40 0.6 PM 30 0.4 20 0.2 MODISAerosol Optical Depth 10 0 0 07/01/04 07/08/04 07/15/04 07/22/04 07/29/04 08/05/04 08/12/04 08/19/04 08/26/04 Courtesy EPA/UWisconsin Conceptually simple idea Η α Extinction Profile and PBL H 100 1.6 Smoke mixing in Hourly PM2.5 90 Daily Average PM2.5 1.4 Maryland 80 MODIS AOD Lidar OD Total Column 20-22 July 2004 Lidar OD Below Boundary Layer 1.2 ) 70 3 60 1 (ug/m 50 0.8 2.5 40 0.6 PM 30 Depth Optical 0.4 20 10 0.2 0 0 07/19/04 07/20/04 07/21/04 07/22/04 07/23/04 Before upgrading: 2008 Existing ALEX - UV N2, H2O Raman lidar - 355, 389, 407 nm ELF - 532(⊥,), 1064 elastic lidar GALION needs QA/QC site for lidars in US Have all the wavelengths that people might use routinely Ability to cross-calibrate instruments Need to add MPL and LEOSPHERE Micropulse Lidar Leosphere UMBC Monitoring of Atmospheric Pollution (UMAP) (NASA Radiation Sciences Supported Project) Weblinks to instruments http://alg.umbc.edu/UMAP Data available 355 nm Leosphere retrieval (new) New instruments BAM and TEOM (PM2.5 continuously) TSI 3683 (3λ nephelometer) CIMEL (8λ AOD, size distribution) LICEL (new detector package for ALEX) MPL Shareware Concept Lidar and radiosonde measurements were also used to evaluate nearby ACARS PBLH estimates at RFK and BWI airports. -

Standard Methods for the Examination of Water and Wastewater
Standard Methods for the Examination of Water and Wastewater Part 1000 INTRODUCTION 1010 INTRODUCTION 1010 A. Scope and Application of Methods The procedures described in these standards are intended for the examination of waters of a wide range of quality, including water suitable for domestic or industrial supplies, surface water, ground water, cooling or circulating water, boiler water, boiler feed water, treated and untreated municipal or industrial wastewater, and saline water. The unity of the fields of water supply, receiving water quality, and wastewater treatment and disposal is recognized by presenting methods of analysis for each constituent in a single section for all types of waters. An effort has been made to present methods that apply generally. Where alternative methods are necessary for samples of different composition, the basis for selecting the most appropriate method is presented as clearly as possible. However, samples with extreme concentrations or otherwise unusual compositions or characteristics may present difficulties that preclude the direct use of these methods. Hence, some modification of a procedure may be necessary in specific instances. Whenever a procedure is modified, the analyst should state plainly the nature of modification in the report of results. Certain procedures are intended for use with sludges and sediments. Here again, the effort has been to present methods of the widest possible application, but when chemical sludges or slurries or other samples of highly unusual composition are encountered, the methods of this manual may require modification or may be inappropriate. Most of the methods included here have been endorsed by regulatory agencies. Procedural modification without formal approval may be unacceptable to a regulatory body. -
Science^Llfn for the Atmospheric Radiation Measurement Program (ARM)
DOE/ER-0670T RECEIVED WR2 5 896 Science^llfn for the Atmospheric Radiation Measurement Program (ARM) February 1996 United States Department of Energy Office of Energy Research Office of Health and Environmental Research Environmental Sciences Division DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsi• bility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Refer• ence herein to any specific commercial product, process, .or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recom• mendation, or favoring by the United States Government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. This report has been reproduced directly from die best available copy. Available to DOE and DOE Contractors from die Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401. Available to the public from die U.S. Department of Commerce, Technology Administration, National Technical Information Service, Springfield, VA 22161, (703) 487-4650. Primed with soy ink on recycled paper DOE/ER-0670T UC-402 Science Plan for the Atmospheric Radiation Measurement Program (ARM) February 1996 MAST United States Department of Energy Office of Energy Research Office of Health and Environmental Research Environmental Sciences Division Washington, DC 20585 DISTRIBUTION OF THIS DOCUMENT !§ UNLIMITED Executive Summary Executive Summary The purpose of this Atmospheric Radiation Measurement 4. -
Coupled Chemistry-Meteorology/ Climate Modelling (CCMM): Status and Relevance for Numerical Weather Prediction, Atmospheric Pollution and Climate Research
GAW Report No. 226 WWRP 2016-1 WCRP Report No. 9/2016 Coupled Chemistry-Meteorology/ Climate Modelling (CCMM): status and relevance for numerical weather prediction, atmospheric pollution and climate research (Geneva, Switzerland, 23-25 February 2015) WEATHER CLIMATE WATER CLIMATE WEATHER WMO-No. 1172 GAW Report No. 226 WWRP 2016-1 WCRP Report No. 9/2016 Coupled Chemistry-Meteorology/ Climate Modelling (CCMM): status and relevance for numerical weather prediction, atmospheric pollution and climate research (Geneva, Switzerland, 23-25 February 2015) WMO-No. 1172 2016 WMO-No. 1172 © World Meteorological Organization, 2016 The right of publication in print, electronic and any other form and in any language is reserved by WMO. Short extracts from WMO publications may be reproduced without authorization, provided that the complete source is clearly indicated. Editorial correspondence and requests to publish, reproduce or translate this publication in part or in whole should be addressed to: Chairperson, Publications Board World Meteorological Organization (WMO) 7 bis, avenue de la Paix Tel.: +41 (0) 22 730 84 03 P.O. Box 2300 Fax: +41 (0) 22 730 80 40 CH-1211 Geneva 2, Switzerland E-mail: [email protected] ISBN 978-92-63-11172-2 NOTE The designations employed in WMO publications and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of WMO concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of itsfrontiers or boundaries. The mention of specific companies or products does not imply that they are endorsed or recommended by WMO in preference to others of a similar nature which are not mentioned or advertised. -

Acp-16-4785-2016-Supplement.Pdf
Supplement of Atmos. Chem. Phys., 16, 4785–4797, 2016 http://www.atmos-chem-phys.net/16/4785/2016/ doi:10.5194/acp-16-4785-2016-supplement © Author(s) 2016. CC Attribution 3.0 License. Supplement of Introduction: Observations and Modeling of the Green Ocean Amazon (GoAmazon2014/5) S. T. Martin et al. Correspondence to: S. T. Martin ([email protected]) The copyright of individual parts of the supplement might differ from the CC-BY 3.0 licence. List of Supplementary Tables Table S1. Instrumentation deployed at T0a (ATTO) during the Intensive Operating Periods of GoAmazon2014/5. Table S2. Instrumentation deployed at T0e (EMPRAPA) during the Intensive Operating Periods of GoAmazon2014/5. Table S3. Instrumentation deployed at T0k (K34; ZF2) during the Intensive Operating Periods of GoAmazon2014/5. Table S4. Instrumentation deployed at T0t (TT34; ZF2) during the Intensive Operating Periods of GoAmazon2014/5. Table S5. Instrumentation deployed at T1p (Ponta Pelada) during the Intensive Operating Periods of GoAmazon2014/5. Table S6. Instrumentation deployed at T1 (INPA campus) during the Intensive Operating Periods of GoAmazon2014/5. Table S7. Instrumentation deployed at T2 (Tiwa) during the Intensive Operating Periods of GoAmazon2014/5. Table S8. University instrumentation deployed at T3 (Fazenda Agropecuária Exata) during the Intensive Operating Periods of GoAmazon2014/5. Table S9. MAOS instrumentation deployed at T3 (Fazenda Agropecuária Exata) during the Intensive Operating Periods of GoAmazon2014/5. Table S10. AMF-1 instrumentation deployed at T3 (Fazenda Agropecuária Exata) during the Intensive Operating Periods of GoAmazon2014/5. Table S11. Instrumentation deployed at T3u (UEA) during the Intensive Operating Periods of GoAmazon2014/5. -

South Central Coast Cooperative Aerometric Monitoring Program
Walter F. Dabberdt1 and South Central Coast Cooperative William Viezee2 Aerometric Monitoring Program (SCCCAMP) Abstract The SCCCAMP field measurement program, conducted 3 September to 7 October 1985, is the most comprehensive mesoscale photochemical study of its type ever undertaken. The study area encompasses 2 X 104 km2 of coastal and interior south-central California including the Santa Barbara Channel. A review of earlier experimental and analytical studies in the area is followed by the organizational framework and planning for this cooperative program. The experimental design and measurement systems are described. Existing ground-based meteoro- logical and air pollution networks were supplemented by additional surface aerometric stations, dual Doppler radars, rawinsondes, and a network of Doppler acoustic profilers. Airborne measurement platforms included one dual-channel lidar, three aerometric sampling aircraft,3 and a meteorological research aircraft. Gas tracer tests included 4-h releases of three perfluorocarbon gas tracers. Tracer measurements were FIG. 1. Topographic map of SCCCAMP region. made over two-day periods at 50 surface locations and aloft by aircraft with a near-realtime two-trap chromatographic system. Four multi-day The SCCCAMP area has been the focus of intensive at- intensive operational periods (IOP) are described, and illustrative re- mospheric research studies for more than two decades during sults from one IOP are presented when extremely high ozone concen- trations were observed at ground level (230 ppb) and aloft (290 ppb). which numerous meteorological, air pollution, and gas-tracer The availability of the composite data base is indicated. measurement and analysis programs have been conducted. Edinger (1963) used aircraft soundings to investigate the mod- ification of the marine boundary layer (MBL) as it is advected through the Santa Clara River Valley. -

WMO/GAW Aerosol Measurement Procedures, Guidelines and Recommendations
GAW Report No. 227 WMO/GAW Aerosol Measurement Procedures, Guidelines and Recommendations 2nd Edition 2016 WEATHER CLIMATE WATER CLIMATE WEATHER WMO-No. 1177 GAW Report No. 227 WMO/GAW Aerosol Measurement Procedures, Guidelines and Recommendations 2nd Edition 2016 WMO-No. 1177 2016 THIS REPORT SUPERSEDES GAW REPORT No. 153 EDITORIAL NOTE METEOTERM, the WMO terminology database, may be consulted at: http://www.wmo.int/pages/prog/lsp/meteoterm_wmo_en.html. Acronyms may also be found at: http://www.wmo.int/pages/themes/acronyms/index_en.html. © World Meteorological Organization, 2016 The right of publication in print, electronic and any other form and in any language is reserved by WMO. Short extracts from WMO publications may be reproduced without authorization, provided that the complete source is clearly indicated. Editorial correspondence and requests to publish, reproduce or translate this publication in part or in whole should be addressed to: Chairperson, Publications Board World Meteorological Organization (WMO) 7 bis, avenue de la Paix Tel.: +41 (0) 22 730 84 03 P.O. Box 2300 Fax: +41 (0) 22 730 80 40 CH-1211 Geneva 2, Switzerland E-mail: [email protected] ISBN 978-92-63-11177-7 NOTE The designations employed in WMO publications and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of WMO concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of itsfrontiers or boundaries. The mention of specific companies or products does not imply that they are endorsed or recommended by WMO in preference to others of a similar nature which are not mentioned or advertised. -

Connected Variations of Meteorological and Electrical Quantities of Surface Atmosphere Under the Influence of Heavy Rain
atmosphere Article Connected Variations of Meteorological and Electrical Quantities of Surface Atmosphere under the Influence of Heavy Rain Vladimir Kalchikhin 1,*, Alexey Kobzev 1 , Petr Nagorskiy 1,2, Mariya Oglezneva 1,2, Konstantin Pustovalov 1,2 , Sergei Smirnov 1 and Dmitriy Filatov 1 1 Institute of Monitoring of Climatic and Ecological Systems of the Siberian Branch of the Russian Academy of Sciences, 10/3, Academicheskii Ave., 634055 Tomsk, Russia; [email protected] (A.K.); [email protected] (P.N.); [email protected] (M.O.); [email protected] (K.P.); [email protected] (S.S.); [email protected] (D.F.) 2 Department of Meteorology and Climatology, National Research Tomsk State University, 36, Lenin Ave., 634050 Tomsk, Russia * Correspondence: [email protected]; Tel.: +7-3822-492024 (ext. 1056) Received: 15 October 2020; Accepted: 29 October 2020; Published: 4 November 2020 Abstract: The electrical state of the surface atmosphere changes significantly under the influence of cloudiness and atmospheric phenomena, including atmospheric precipitation. These features can be used for possible diagnostics of precipitation and improvement of their characteristics based on variations of atmospheric-electrical quantities in the surface layer. Studies of variations of meteorological and atmospheric-electrical quantities in the surface layer were carried out during the heavy rainfall associated with the cumulonimbus (Cb) clouds passage. Meteorological and atmospheric-electrical observations in the Geophysical Observatory of the Institute of Monitoring of Climatic and Ecological Systems are presented in this paper. Precipitation data are used to identify periods of heavy rainfall 5 mm/h. Information of weather stations and satellites is used to separate the heavy rainfall events by ≥ synoptic conditions like thunderstorms and showers of frontal or internal air masses. -

Summit Station Year-Round Measurements
2018 Summit Year-round Measurements – ICECAPS CONTACTS – Von Walden (PI) – [email protected]; primary contact for PAERI, general project inquiries Matthew Shupe (Co-I) – [email protected]; primary contact radiosondes, MMCR, MPL, Hotplate, POSS, TSI, SODAR David Turner (Co-I) – [email protected]; primary contact on Ceilometer, MWRs, Ralf Bennartz (Co-I) – [email protected]; primary contact on MASC Ryan Neely (Collaborator) – [email protected]; primary contact on CAPABL • ICECAPS Radiosondes – twice daily (00Z & 12Z) Vaisala RS41-SG/SGP model sondes measuring vertical profiles to ~25km altitude at ~5m resolution of: o winds o temperature o humidity • ICECAPS Polar Atmospheric Emitted Radiance Interferometer (PAERI) – passive calibrated infrared interferometer in the 3.3-25 micron window at 0.5 cm-1 resolution measuring spectral IR sky brightness temperatures and radiances to derive: o cloud ice/water content o cloud optical depth o cloud particle size o cloud radiative forcing o cloud temperature o cloud occurrence • ICECAPS Millimeter Cloud Radar (MMCR) – multimode 35 GHz Ka band, pulsed Doppler radar sensing signal from -50 to +20 dBZ measuring radar Doppler spectra and moments (reflectivity, mean Doppler velocity, spectrum width) of detected hydrometeors to derive: o cloud vertical boundaries o cloud occurrence o atmospheric winds o cloud particle size o cloud ice/water content o atmospheric turbulence • ICECAPS Microwave Radiometers (MWR) – two scanning passive radiometers measuring downwelling radiance at 22-31, -

Dear Editor and Referees, We Would Like to Thank The
Dear editor and referees, We would like to thank the referees for the valuable comments. There is a major concern that both referees share and we would like to address that in the first place, and then answer separately for each question. This major concern refers to the calibration process, and not including the 2-way transmission (Tp). From this, it derives the concern of performing the calibration during the event if the aerosol load is high. We must say that the calibration process and obtaining backscatter coefficient profiles are two separate processes but thanks to the referees comments we realized that not including the Tp, the process is less intuitive and harder to explain. We recalculated everything including the Tp calculated with the AOD and values for the calibration factor for each site are provided. The entire methodology section has changed. Each process is described in a subsection (calibration on section 3.1 and inversion and validation on section 3.2 and 3.2.1). The distinction between CL* and CL is no longer necessary, so equations has been modified accordingly. We hope that this new structure provides a better understanding of the methodology applied. We revised the manuscript according to the rest of suggestions and we replied to all the concern raised by the referees. Next paragraphs show comments and questions from referees (in red) and our response (in black). Concerning Referee #1: The authors state that the desert dust event was unusal. In what sense? Why it was unusual? Please add some comments. Valenzuela et al., (2012) presented a classification of dust events affecting southern Spain during the period 2005-2010. -

Redesigned Technical Study Plan Columbia River Gorge National Scenic Area Air Quality Study
Redesigned Technical Study Plan Columbia River Gorge National Scenic Area Air Quality Study ~7/25/2003~ Developing a Regional Air Quality Strategy for the Columbia River Gorge National Scenic Area Executive Summary In July of 2001, the Columbia River Gorge Technical Team and Interagency Coordination Team, with the assistance of national and global experts in air quality science, developed a phased, technical study plan for the Columbia River Gorge National Scenic Area. In 2003, WDOE, ODEQ and SWCAA asked the Technical Team to develop a “stand alone” study, leveraging other studies and within the available resources, that would: a) provide an assessment of the causes of visibility impairment in the Columbia River Gorge National Scenic Area; b) identify emission source regions, emission source categories, and individual emission sources significantly contributing to visibility impairment in the Gorge; c) provide predictive modeling tools or methods that will allow the evaluation of emission reduction strategies; d) provide an initial assessment of air quality benefits to the Gorge from upcoming state and federal air quality programs; and e) refine or adapt predictive modeling tools already being developed for visibility or other air quality programs, including but not limited to Regional Haze. Some of the existing state and federal air quality programs from which emission reduction is expected include: 1) Ozone Strategies: Ozone plan updates for Portland/Vancouver and Seattle. 2) New Source Review: New or expanding major point sources must evaluate air quality impacts on Class I areas. Given the Gorge’s proximity to the adjacent Class I areas, the Gorge NSA will benefit indirectly from the New Source Review program. -

History Group Newsletter 1, 2013, Pp.8-9
HISTORY GROUP NEWSLETTER News, views and a miscellany published by the Royal Meteorological Society’s Special Interest Group for the History of Meteorology and Physical Oceanography Issue No.3, 2013 CONTENTS Forthcoming events ....................................... 1 - Earth’s climate: past, present and future ..... 1 FORTHCOMING EVENTS - The history of weather ships ....................... 1 Meeting suggestions are greatly welcomed. What - Meteorology of D-Day revisited ................... 2 kind of meetings would you like arranged? Where Hubert Lamb centenary meeting ................... 3 would you like them to be held? Are any days of the Travels in the air modern style ...................... 7 week more convenient for you than others? Would My early days in the Met Office ................... 13 you support two-day meetings? Can you The year without a summer ......................... 14 recommend a venue that could host meetings? Recent publications ..................................... 14 Please send ideas and suggestions to Malcolm Weather still remains boisterous ................. 15 Walker (contact details on page 20). History of the Greenhouse Effect ................. 18 Here are dates for your diary. Anniversary dinner ...................................... 18 - - - - - - - - - - - - - - - - - What did a recording rain gauge cost? ......... 19 2013 members ............................................ 20 THE EARTH’S CLIMATE: PAST, PRESENT AND FUTURE Thursday 9 January 2014 - - - - - - - - - - - - - - - - - Institute of Physics,