Search Trees
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
CMSC 341 Data Structure Asymptotic Analysis Review
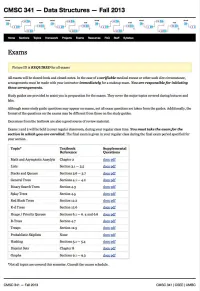
CMSC 341 Data Structure Asymptotic Analysis Review These questions will help test your understanding of the asymptotic analysis material discussed in class and in the text. These questions are only a study guide. Questions found here may be on your exam, although perhaps in a different format. Questions NOT found here may also be on your exam. 1. What is the purpose of asymptotic analysis? 2. Define “Big-Oh” using a formal, mathematical definition. 3. Let T1(x) = O(f(x)) and T2(x) = O(g(x)). Prove T1(x) + T2(x) = O (max(f(x), g(x))). 4. Let T(x) = O(cf(x)), where c is some positive constant. Prove T(x) = O(f(x)). 5. Let T1(x) = O(f(x)) and T2(x) = O(g(x)). Prove T1(x) * T2(x) = O(f(x) * g(x)) 6. Prove 2n+1 = O(2n). 7. Prove that if T(n) is a polynomial of degree x, then T(n) = O(nx). 8. Number these functions in ascending (slowest growing to fastest growing) Big-Oh order: Number Big-Oh O(n3) O(n2 lg n) O(1) O(lg0.1 n) O(n1.01) O(n2.01) O(2n) O(lg n) O(n) O(n lg n) O (n lg5 n) 1 9. Determine, for the typical algorithms that you use to perform calculations by hand, the running time to: a. Add two N-digit numbers b. Multiply two N-digit numbers 10. What is the asymptotic performance of each of the following? Select among: a. O(n) b. -

Compressed Suffix Trees with Full Functionality
Compressed Suffix Trees with Full Functionality Kunihiko Sadakane Department of Computer Science and Communication Engineering, Kyushu University Hakozaki 6-10-1, Higashi-ku, Fukuoka 812-8581, Japan [email protected] Abstract We introduce new data structures for compressed suffix trees whose size are linear in the text size. The size is measured in bits; thus they occupy only O(n log |A|) bits for a text of length n on an alphabet A. This is a remarkable improvement on current suffix trees which require O(n log n) bits. Though some components of suffix trees have been compressed, there is no linear-size data structure for suffix trees with full functionality such as computing suffix links, string-depths and lowest common ancestors. The data structure proposed in this paper is the first one that has linear size and supports all operations efficiently. Any algorithm running on a suffix tree can also be executed on our compressed suffix trees with a slight slowdown of a factor of polylog(n). 1 Introduction Suffix trees are basic data structures for string algorithms [13]. A pattern can be found in time proportional to the pattern length from a text by constructing the suffix tree of the text in advance. The suffix tree can also be used for more complicated problems, for example finding the longest repeated substring in linear time. Many efficient string algorithms are based on the use of suffix trees because this does not increase the asymptotic time complexity. A suffix tree of a string can be constructed in linear time in the string length [28, 21, 27, 5]. -

Amortized Analysis Worst-Case Analysis
Beyond Worst Case Analysis Amortized Analysis Worst-case analysis. ■ Analyze running time as function of worst input of a given size. Average case analysis. ■ Analyze average running time over some distribution of inputs. ■ Ex: quicksort. Amortized analysis. ■ Worst-case bound on sequence of operations. ■ Ex: splay trees, union-find. Competitive analysis. ■ Make quantitative statements about online algorithms. ■ Ex: paging, load balancing. Princeton University • COS 423 • Theory of Algorithms • Spring 2001 • Kevin Wayne 2 Amortized Analysis Dynamic Table Amortized analysis. Dynamic tables. ■ Worst-case bound on sequence of operations. ■ Store items in a table (e.g., for open-address hash table, heap). – no probability involved ■ Items are inserted and deleted. ■ Ex: union-find. – too many items inserted ⇒ copy all items to larger table – sequence of m union and find operations starting with n – too many items deleted ⇒ copy all items to smaller table singleton sets takes O((m+n) α(n)) time. – single union or find operation might be expensive, but only α(n) Amortized analysis. on average ■ Any sequence of n insert / delete operations take O(n) time. ■ Space used is proportional to space required. ■ Note: actual cost of a single insert / delete can be proportional to n if it triggers a table expansion or contraction. Bottleneck operation. ■ We count insertions (or re-insertions) and deletions. ■ Overhead of memory management is dominated by (or proportional to) cost of transferring items. 3 4 Dynamic Table: Insert Dynamic Table: Insert Dynamic Table Insert Accounting method. Initialize table size m = 1. ■ Charge each insert operation $3 (amortized cost). – use $1 to perform immediate insert INSERT(x) – store $2 in with new item IF (number of elements in table = m) ■ When table doubles: Generate new table of size 2m. -

Interval Trees Storing and Searching Intervals
Interval Trees Storing and Searching Intervals • Instead of points, suppose you want to keep track of axis-aligned segments: • Range queries: return all segments that have any part of them inside the rectangle. • Motivation: wiring diagrams, genes on genomes Simpler Problem: 1-d intervals • Segments with at least one endpoint in the rectangle can be found by building a 2d range tree on the 2n endpoints. - Keep pointer from each endpoint stored in tree to the segments - Mark segments as you output them, so that you don’t output contained segments twice. • Segments with no endpoints in range are the harder part. - Consider just horizontal segments - They must cross a vertical side of the region - Leads to subproblem: Given a vertical line, find segments that it crosses. - (y-coords become irrelevant for this subproblem) Interval Trees query line interval Recursively build tree on interval set S as follows: Sort the 2n endpoints Let xmid be the median point Store intervals that cross xmid in node N intervals that are intervals that are completely to the completely to the left of xmid in Nleft right of xmid in Nright Another view of interval trees x Interval Trees, continued • Will be approximately balanced because by choosing the median, we split the set of end points up in half each time - Depth is O(log n) • Have to store xmid with each node • Uses O(n) storage - each interval stored once, plus - fewer than n nodes (each node contains at least one interval) • Can be built in O(n log n) time. • Can be searched in O(log n + k) time [k = # -
Lecture 26 Fall 2019 Instructors: B&S Administrative Details
CSCI 136 Data Structures & Advanced Programming Lecture 26 Fall 2019 Instructors: B&S Administrative Details • Lab 9: Super Lexicon is online • Partners are permitted this week! • Please fill out the form by tonight at midnight • Lab 6 back 2 2 Today • Lab 9 • Efficient Binary search trees (Ch 14) • AVL Trees • Height is O(log n), so all operations are O(log n) • Red-Black Trees • Different height-balancing idea: height is O(log n) • All operations are O(log n) 3 2 Implementing the Lexicon as a trie There are several different data structures you could use to implement a lexicon— a sorted array, a linked list, a binary search tree, a hashtable, and many others. Each of these offers tradeoffs between the speed of word and prefix lookup, amount of memory required to store the data structure, the ease of writing and debugging the code, performance of add/remove, and so on. The implementation we will use is a special kind of tree called a trie (pronounced "try"), designed for just this purpose. A trie is a letter-tree that efficiently stores strings. A node in a trie represents a letter. A path through the trie traces out a sequence ofLab letters that9 represent : Lexicon a prefix or word in the lexicon. Instead of just two children as in a binary tree, each trie node has potentially 26 child pointers (one for each letter of the alphabet). Whereas searching a binary search tree eliminates half the words with a left or right turn, a search in a trie follows the child pointer for the next letter, which narrows the search• Goal: to just words Build starting a datawith that structure letter. -

Suffix Trees
JASS 2008 Trees - the ubiquitous structure in computer science and mathematics Suffix Trees Caroline L¨obhard St. Petersburg, 9.3. - 19.3. 2008 1 Contents 1 Introduction to Suffix Trees 3 1.1 Basics . 3 1.2 Getting a first feeling for the nice structure of suffix trees . 4 1.3 A historical overview of algorithms . 5 2 Ukkonen’s on-line space-economic linear-time algorithm 6 2.1 High-level description . 6 2.2 Using suffix links . 7 2.3 Edge-label compression and the skip/count trick . 8 2.4 Two more observations . 9 3 Generalised Suffix Trees 9 4 Applications of Suffix Trees 10 References 12 2 1 Introduction to Suffix Trees A suffix tree is a tree-like data-structure for strings, which affords fast algorithms to find all occurrences of substrings. A given String S is preprocessed in O(|S|) time. Afterwards, for any other string P , one can decide in O(|P |) time, whether P can be found in S and denounce all its exact positions in S. This linear worst case time bound depending only on the length of the (shorter) string |P | is special and important for suffix trees since an amount of applications of string processing has to deal with large strings S. 1.1 Basics In this paper, we will denote the fixed alphabet with Σ, single characters with lower-case letters x, y, ..., strings over Σ with upper-case or Greek letters P, S, ..., α, σ, τ, ..., Trees with script letters T , ... and inner nodes of trees (that is, all nodes despite of root and leaves) with lower-case letters u, v, ... -

Augmentation: Range Trees (PDF)
Lecture 9 Augmentation 6.046J Spring 2015 Lecture 9: Augmentation This lecture covers augmentation of data structures, including • easy tree augmentation • order-statistics trees • finger search trees, and • range trees The main idea is to modify “off-the-shelf” common data structures to store (and update) additional information. Easy Tree Augmentation The goal here is to store x.f at each node x, which is a function of the node, namely f(subtree rooted at x). Suppose x.f can be computed (updated) in O(1) time from x, children and children.f. Then, modification a set S of nodes costs O(# of ancestors of S)toupdate x.f, because we need to walk up the tree to the root. Two examples of O(lg n) updates are • AVL trees: after rotating two nodes, first update the new bottom node and then update the new top node • 2-3 trees: after splitting a node, update the two new nodes. • In both cases, then update up the tree. Order-Statistics Trees (from 6.006) The goal of order-statistics trees is to design an Abstract Data Type (ADT) interface that supports the following operations • insert(x), delete(x), successor(x), • rank(x): find x’s index in the sorted order, i.e., # of elements <x, • select(i): find the element with rank i. 1 Lecture 9 Augmentation 6.046J Spring 2015 We can implement the above ADT using easy tree augmentation on AVL trees (or 2-3 trees) to store subtree size: f(subtree) = # of nodes in it. Then we also have x.size =1+ c.size for c in x.children. -

Advanced Data Structures
Advanced Data Structures PETER BRASS City College of New York CAMBRIDGE UNIVERSITY PRESS Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo Cambridge University Press The Edinburgh Building, Cambridge CB2 8RU, UK Published in the United States of America by Cambridge University Press, New York www.cambridge.org Information on this title: www.cambridge.org/9780521880374 © Peter Brass 2008 This publication is in copyright. Subject to statutory exception and to the provision of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published in print format 2008 ISBN-13 978-0-511-43685-7 eBook (EBL) ISBN-13 978-0-521-88037-4 hardback Cambridge University Press has no responsibility for the persistence or accuracy of urls for external or third-party internet websites referred to in this publication, and does not guarantee that any content on such websites is, or will remain, accurate or appropriate. Contents Preface page xi 1 Elementary Structures 1 1.1 Stack 1 1.2 Queue 8 1.3 Double-Ended Queue 16 1.4 Dynamical Allocation of Nodes 16 1.5 Shadow Copies of Array-Based Structures 18 2 Search Trees 23 2.1 Two Models of Search Trees 23 2.2 General Properties and Transformations 26 2.3 Height of a Search Tree 29 2.4 Basic Find, Insert, and Delete 31 2.5ReturningfromLeaftoRoot35 2.6 Dealing with Nonunique Keys 37 2.7 Queries for the Keys in an Interval 38 2.8 Building Optimal Search Trees 40 2.9 Converting Trees into Lists 47 2.10 -
L11: Quadtrees CSE373, Winter 2020
L11: Quadtrees CSE373, Winter 2020 Quadtrees CSE 373 Winter 2020 Instructor: Hannah C. Tang Teaching Assistants: Aaron Johnston Ethan Knutson Nathan Lipiarski Amanda Park Farrell Fileas Sam Long Anish Velagapudi Howard Xiao Yifan Bai Brian Chan Jade Watkins Yuma Tou Elena Spasova Lea Quan L11: Quadtrees CSE373, Winter 2020 Announcements ❖ Homework 4: Heap is released and due Wednesday ▪ Hint: you will need an additional data structure to improve the runtime for changePriority(). It does not affect the correctness of your PQ at all. Please use a built-in Java collection instead of implementing your own. ▪ Hint: If you implemented a unittest that tested the exact thing the autograder described, you could run the autograder’s test in the debugger (and also not have to use your tokens). ❖ Please look at posted QuickCheck; we had a few corrections! 2 L11: Quadtrees CSE373, Winter 2020 Lecture Outline ❖ Heaps, cont.: Floyd’s buildHeap ❖ Review: Set/Map data structures and logarithmic runtimes ❖ Multi-dimensional Data ❖ Uniform and Recursive Partitioning ❖ Quadtrees 3 L11: Quadtrees CSE373, Winter 2020 Other Priority Queue Operations ❖ The two “primary” PQ operations are: ▪ removeMax() ▪ add() ❖ However, because PQs are used in so many algorithms there are three common-but-nonstandard operations: ▪ merge(): merge two PQs into a single PQ ▪ buildHeap(): reorder the elements of an array so that its contents can be interpreted as a valid binary heap ▪ changePriority(): change the priority of an item already in the heap 4 L11: Quadtrees CSE373, -

The Random Access Zipper: Simple, Purely-Functional Sequences
The Random Access Zipper: Simple, Purely-Functional Sequences Kyle Headley and Matthew A. Hammer University of Colorado Boulder [email protected], [email protected] Abstract. We introduce the Random Access Zipper (RAZ), a simple, purely-functional data structure for editable sequences. The RAZ com- bines the structure of a zipper with that of a tree: like a zipper, edits at the cursor require constant time; by leveraging tree structure, relocating the edit cursor in the sequence requires log time. While existing data structures provide these time bounds, none do so with the same simplic- ity and brevity of code as the RAZ. The simplicity of the RAZ provides the opportunity for more programmers to extend the structure to their own needs, and we provide some suggestions for how to do so. 1 Introduction The singly-linked list is the most common representation of sequences for func- tional programmers. This structure is considered a core primitive in every func- tional language, and morever, the principles of its simple design recur througout user-defined structures that are \sequence-like". Though simple and ubiquitous, the functional list has a serious shortcoming: users may only efficiently access and edit the head of the list. In particular, random accesses (or edits) generally require linear time. To overcome this problem, researchers have developed other data structures representing (functional) sequences, most notably, finger trees [8]. These struc- tures perform well, allowing edits in (amortized) constant time and moving the edit location in logarithmic time. More recently, researchers have proposed the RRB-Vector [14], offering a balanced tree representation for immutable vec- tors. -

Splay Trees Last Changed: January 28, 2017
15-451/651: Design & Analysis of Algorithms January 26, 2017 Lecture #4: Splay Trees last changed: January 28, 2017 In today's lecture, we will discuss: • binary search trees in general • definition of splay trees • analysis of splay trees The analysis of splay trees uses the potential function approach we discussed in the previous lecture. It seems to be required. 1 Binary Search Trees These lecture notes assume that you have seen binary search trees (BSTs) before. They do not contain much expository or backtround material on the basics of BSTs. Binary search trees is a class of data structures where: 1. Each node stores a piece of data 2. Each node has two pointers to two other binary search trees 3. The overall structure of the pointers is a tree (there's a root, it's acyclic, and every node is reachable from the root.) Binary search trees are a way to store and update a set of items, where there is an ordering on the items. I know this is rather vague. But there is not a precise way to define the gamut of applications of search trees. In general, there are two classes of applications. Those where each item has a key value from a totally ordered universe, and those where the tree is used as an efficient way to represent an ordered list of items. Some applications of binary search trees: • Storing a set of names, and being able to lookup based on a prefix of the name. (Used in internet routers.) • Storing a path in a graph, and being able to reverse any subsection of the path in O(log n) time. -

Lock-Free Search Data Structures: Throughput Modeling with Poisson Processes
Lock-Free Search Data Structures: Throughput Modeling with Poisson Processes Aras Atalar Chalmers University of Technology, S-41296 Göteborg, Sweden [email protected] Paul Renaud-Goud Informatics Research Institute of Toulouse, F-31062 Toulouse, France [email protected] Philippas Tsigas Chalmers University of Technology, S-41296 Göteborg, Sweden [email protected] Abstract This paper considers the modeling and the analysis of the performance of lock-free concurrent search data structures. Our analysis considers such lock-free data structures that are utilized through a sequence of operations which are generated with a memoryless and stationary access pattern. Our main contribution is a new way of analyzing lock-free concurrent search data structures: our execution model matches with the behavior that we observe in practice and achieves good throughput predictions. Search data structures are formed of basic blocks, usually referred to as nodes, which can be accessed by two kinds of events, characterized by their latencies; (i) CAS events originated as a result of modifications of the search data structure (ii) Read events that occur during traversals. An operation triggers a set of events, and the running time of an operation is computed as the sum of the latencies of these events. We identify the factors that impact the latency of such events on a multi-core shared memory system. The main challenge (though not the only one) is that the latency of each event mainly depends on the state of the caches at the time when it is triggered, and the state of caches is changing due to events that are triggered by the operations of any thread in the system.