Augmentation: Range Trees (PDF)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1 Suffix Trees
This material takes about 1.5 hours. 1 Suffix Trees Gusfield: Algorithms on Strings, Trees, and Sequences. Weiner 73 “Linear Pattern-matching algorithms” IEEE conference on automata and switching theory McCreight 76 “A space-economical suffix tree construction algorithm” JACM 23(2) 1976 Chen and Seifras 85 “Efficient and Elegegant Suffix tree construction” in Apos- tolico/Galil Combninatorial Algorithms on Words Another “search” structure, dedicated to strings. Basic problem: match a “pattern” (of length m) to “text” (of length n) • goal: decide if a given string (“pattern”) is a substring of the text • possibly created by concatenating short ones, eg newspaper • application in IR, also computational bio (DNA seqs) • if pattern avilable first, can build DFA, run in time linear in text • if text available first, can build suffix tree, run in time linear in pattern. • applications in computational bio. First idea: binary tree on strings. Inefficient because run over pattern many times. • fractional cascading? • realize only need one character at each node! Tries: • used to store dictionary of strings • trees with children indexed by “alphabet” • time to search equal length of query string • insertion ditto. • optimal, since even hashing requires this time to hash. • but better, because no “hash function” computed. • space an issue: – using array increases stroage cost by |Σ| – using binary tree on alphabet increases search time by log |Σ| 1 – ok for “const alphabet” – if really fussy, could use hash-table at each node. • size in worst case: sum of word lengths (so pretty much solves “dictionary” problem. But what about substrings? • Relevance to DNA searches • idea: trie of all n2 substrings • equivalent to trie of all n suffixes. -

Managing Unbounded-Length Keys in Comparison-Driven Data
Managing Unbounded-Length Keys in Comparison-Driven Data Structures with Applications to On-Line Indexing∗ Amihood Amir Gianni Franceschini Department of Computer Science Dipartimento di Informatica Bar-Ilan University, Israel Universita` di Pisa, Italy and Department of Computer Science John Hopkins University, Baltimore MD Roberto Grossi Tsvi Kopelowitz Dipartimento di Informatica Department of Computer Science Universita` di Pisa, Italy Bar-Ilan University, Israel Moshe Lewenstein Noa Lewenstein Department of Computer Science Department of Computer Science Bar-Ilan University, Israel Netanya College, Israel arXiv:1306.0406v1 [cs.DS] 3 Jun 2013 ∗Parts of this paper appeared as extended abstracts in [3, 20]. 1 Abstract This paper presents a general technique for optimally transforming any dynamic data struc- ture that operates on atomic and indivisible keys by constant-time comparisons, into a data structure that handles unbounded-length keys whose comparison cost is not a constant. Exam- ples of these keys are strings, multi-dimensional points, multiple-precision numbers, multi-key data (e.g. records), XML paths, URL addresses, etc. The technique is more general than what has been done in previous work as no particular exploitation of the underlying structure of is required. The only requirement is that the insertion of a key must identify its predecessor or its successor. Using the proposed technique, online suffix tree construction can be done in worst case time O(log n) per input symbol (as opposed to amortized O(log n) time per symbol, achieved by previously known algorithms). To our knowledge, our algorithm is the first that achieves O(log n) worst case time per input symbol. -

Interval Trees Storing and Searching Intervals
Interval Trees Storing and Searching Intervals • Instead of points, suppose you want to keep track of axis-aligned segments: • Range queries: return all segments that have any part of them inside the rectangle. • Motivation: wiring diagrams, genes on genomes Simpler Problem: 1-d intervals • Segments with at least one endpoint in the rectangle can be found by building a 2d range tree on the 2n endpoints. - Keep pointer from each endpoint stored in tree to the segments - Mark segments as you output them, so that you don’t output contained segments twice. • Segments with no endpoints in range are the harder part. - Consider just horizontal segments - They must cross a vertical side of the region - Leads to subproblem: Given a vertical line, find segments that it crosses. - (y-coords become irrelevant for this subproblem) Interval Trees query line interval Recursively build tree on interval set S as follows: Sort the 2n endpoints Let xmid be the median point Store intervals that cross xmid in node N intervals that are intervals that are completely to the completely to the left of xmid in Nleft right of xmid in Nright Another view of interval trees x Interval Trees, continued • Will be approximately balanced because by choosing the median, we split the set of end points up in half each time - Depth is O(log n) • Have to store xmid with each node • Uses O(n) storage - each interval stored once, plus - fewer than n nodes (each node contains at least one interval) • Can be built in O(n log n) time. • Can be searched in O(log n + k) time [k = # -

Advanced Data Structures
Advanced Data Structures PETER BRASS City College of New York CAMBRIDGE UNIVERSITY PRESS Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo Cambridge University Press The Edinburgh Building, Cambridge CB2 8RU, UK Published in the United States of America by Cambridge University Press, New York www.cambridge.org Information on this title: www.cambridge.org/9780521880374 © Peter Brass 2008 This publication is in copyright. Subject to statutory exception and to the provision of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published in print format 2008 ISBN-13 978-0-511-43685-7 eBook (EBL) ISBN-13 978-0-521-88037-4 hardback Cambridge University Press has no responsibility for the persistence or accuracy of urls for external or third-party internet websites referred to in this publication, and does not guarantee that any content on such websites is, or will remain, accurate or appropriate. Contents Preface page xi 1 Elementary Structures 1 1.1 Stack 1 1.2 Queue 8 1.3 Double-Ended Queue 16 1.4 Dynamical Allocation of Nodes 16 1.5 Shadow Copies of Array-Based Structures 18 2 Search Trees 23 2.1 Two Models of Search Trees 23 2.2 General Properties and Transformations 26 2.3 Height of a Search Tree 29 2.4 Basic Find, Insert, and Delete 31 2.5ReturningfromLeaftoRoot35 2.6 Dealing with Nonunique Keys 37 2.7 Queries for the Keys in an Interval 38 2.8 Building Optimal Search Trees 40 2.9 Converting Trees into Lists 47 2.10 -

Search Trees
Lecture III Page 1 “Trees are the earth’s endless effort to speak to the listening heaven.” – Rabindranath Tagore, Fireflies, 1928 Alice was walking beside the White Knight in Looking Glass Land. ”You are sad.” the Knight said in an anxious tone: ”let me sing you a song to comfort you.” ”Is it very long?” Alice asked, for she had heard a good deal of poetry that day. ”It’s long.” said the Knight, ”but it’s very, very beautiful. Everybody that hears me sing it - either it brings tears to their eyes, or else -” ”Or else what?” said Alice, for the Knight had made a sudden pause. ”Or else it doesn’t, you know. The name of the song is called ’Haddocks’ Eyes.’” ”Oh, that’s the name of the song, is it?” Alice said, trying to feel interested. ”No, you don’t understand,” the Knight said, looking a little vexed. ”That’s what the name is called. The name really is ’The Aged, Aged Man.’” ”Then I ought to have said ’That’s what the song is called’?” Alice corrected herself. ”No you oughtn’t: that’s another thing. The song is called ’Ways and Means’ but that’s only what it’s called, you know!” ”Well, what is the song then?” said Alice, who was by this time completely bewildered. ”I was coming to that,” the Knight said. ”The song really is ’A-sitting On a Gate’: and the tune’s my own invention.” So saying, he stopped his horse and let the reins fall on its neck: then slowly beating time with one hand, and with a faint smile lighting up his gentle, foolish face, he began.. -
Computational Geometry: 1D Range Tree, 2D Range Tree, Line
Computational Geometry Lecture 17 Computational geometry Algorithms for solving “geometric problems” in 2D and higher. Fundamental objects: point line segment line Basic structures: point set polygon L17.2 Computational geometry Algorithms for solving “geometric problems” in 2D and higher. Fundamental objects: point line segment line Basic structures: triangulation convex hull L17.3 Orthogonal range searching Input: n points in d dimensions • E.g., representing a database of n records each with d numeric fields Query: Axis-aligned box (in 2D, a rectangle) • Report on the points inside the box: • Are there any points? • How many are there? • List the points. L17.4 Orthogonal range searching Input: n points in d dimensions Query: Axis-aligned box (in 2D, a rectangle) • Report on the points inside the box Goal: Preprocess points into a data structure to support fast queries • Primary goal: Static data structure • In 1D, we will also obtain a dynamic data structure supporting insert and delete L17.5 1D range searching In 1D, the query is an interval: First solution using ideas we know: • Interval trees • Represent each point x by the interval [x, x]. • Obtain a dynamic structure that can list k answers in a query in O(k lg n) time. L17.6 1D range searching In 1D, the query is an interval: Second solution using ideas we know: • Sort the points and store them in an array • Solve query by binary search on endpoints. • Obtain a static structure that can list k answers in a query in O(k + lg n) time. Goal: Obtain a dynamic structure that can list k answers in a query in O(k + lg n) time. -

Optimal Finger Search Trees in the Pointer Machine
Alcom-FT Technical Report Series ALCOMFT-TR-02-77 Optimal Finger Search Trees in the Pointer Machine Gerth Stølting Brodal∗ George Lagogiannis† Christos Makris† Athanasios Tsakalidis† Kostas Tsichlas† Abstract We develop a new finger search tree with worst-case constant update time in the Pointer Machine (PM) model of computation. This was a major problem in the field of Data Structures and was tantalizingly open for over twenty years while many attempts by researchers were made to solve it. The result comes as a consequence of the innovative mechanism that guides the rebalancing operations combined with incremental multiple splitting and fusion techniques over nodes. Keywords balanced trees, update operations, finger search trees, data structures, complexity 1 Introduction The balanced search tree is one of the most common data structures used in algorithms. Assuming that the update position is known, balanced search trees with O(1) amortized update time have been presented long ago ([6, 14]). It has also been known ([6, 16]) that updates can be performed in O(1) structural changes, but the nodes to be changed have to be searched in Ω(log n) time. Levcopoulos and Overmars ([13]) presented an algorithm achieving O(1) worst case update time by using a global splitting lemma that is based on a pebble game combined with the bucketing technique of Overmars ([14]). Instead of storing single keys in the leaves of the search tree, each leaf can store a list of several keys. Unfortunately, the buckets in [13] have size O(log2 n), so they need a two level hierarchy of lists in order to guarantee O(log n) query time within the buckets. -
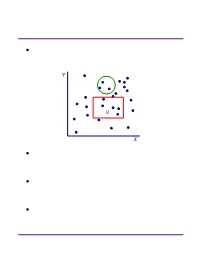
Range Searching
Range Searching ² Data structure for a set of objects (points, rectangles, polygons) for efficient range queries. Y Q X ² Depends on type of objects and queries. Consider basic data structures with broad applicability. ² Time-Space tradeoff: the more we preprocess and store, the faster we can solve a query. ² Consider data structures with (nearly) linear space. Subhash Suri UC Santa Barbara Orthogonal Range Searching ² Fix a n-point set P . It has 2n subsets. How many are possible answers to geometric range queries? Y 5 Some impossible rectangular ranges 6 (1,2,3), (1,4), (2,5,6). 1 4 Range (1,5,6) is possible. 3 2 X ² Efficiency comes from the fact that only a small fraction of subsets can be formed. ² Orthogonal range searching deals with point sets and axis-aligned rectangle queries. ² These generalize 1-dimensional sorting and searching, and the data structures are based on compositions of 1-dim structures. Subhash Suri UC Santa Barbara 1-Dimensional Search ² Points in 1D P = fp1; p2; : : : ; png. ² Queries are intervals. 15 71 3 7 9 21 23 25 45 70 72 100 120 ² If the range contains k points, we want to solve the problem in O(log n + k) time. ² Does hashing work? Why not? ² A sorted array achieves this bound. But it doesn’t extend to higher dimensions. ² Instead, we use a balanced binary tree. Subhash Suri UC Santa Barbara Tree Search 15 7 24 3 12 20 27 1 4 9 14 17 22 25 29 1 3 4 7 9 12 14 15 17 20 22 24 25 27 29 31 u v xlo =2 x hi =23 ² Build a balanced binary tree on the sorted list of points (keys). -

Bulk Updates and Cache Sensitivity in Search Trees
BULK UPDATES AND CACHE SENSITIVITY INSEARCHTREES TKK Research Reports in Computer Science and Engineering A Espoo 2009 TKK-CSE-A2/09 BULK UPDATES AND CACHE SENSITIVITY INSEARCHTREES Doctoral Dissertation Riku Saikkonen Dissertation for the degree of Doctor of Science in Technology to be presented with due permission of the Faculty of Information and Natural Sciences, Helsinki University of Technology for public examination and debate in Auditorium T2 at Helsinki University of Technology (Espoo, Finland) on the 4th of September, 2009, at 12 noon. Helsinki University of Technology Faculty of Information and Natural Sciences Department of Computer Science and Engineering Teknillinen korkeakoulu Informaatio- ja luonnontieteiden tiedekunta Tietotekniikan laitos Distribution: Helsinki University of Technology Faculty of Information and Natural Sciences Department of Computer Science and Engineering P.O. Box 5400 FI-02015 TKK FINLAND URL: http://www.cse.tkk.fi/ Tel. +358 9 451 3228 Fax. +358 9 451 3293 E-mail: [email protected].fi °c 2009 Riku Saikkonen Layout: Riku Saikkonen (except cover) Cover image: Riku Saikkonen Set in the Computer Modern typeface family designed by Donald E. Knuth. ISBN 978-952-248-037-8 ISBN 978-952-248-038-5 (PDF) ISSN 1797-6928 ISSN 1797-6936 (PDF) URL: http://lib.tkk.fi/Diss/2009/isbn9789522480385/ Multiprint Oy Espoo 2009 AB ABSTRACT OF DOCTORAL DISSERTATION HELSINKI UNIVERSITY OF TECHNOLOGY P.O. Box 1000, FI-02015 TKK http://www.tkk.fi/ Author Riku Saikkonen Name of the dissertation Bulk Updates and Cache Sensitivity in Search Trees Manuscript submitted 09.04.2009 Manuscript revised 15.08.2009 Date of the defence 04.09.2009 £ Monograph ¤ Article dissertation (summary + original articles) Faculty Faculty of Information and Natural Sciences Department Department of Computer Science and Engineering Field of research Software Systems Opponent(s) Prof. -

Space-Efficient Data Structures, Streams, and Algorithms
Andrej Brodnik Alejandro López-Ortiz Venkatesh Raman Alfredo Viola (Eds.) Festschrift Space-Efficient Data Structures, Streams, LNCS 8066 and Algorithms Papers in Honor of J. Ian Munro on the Occasion of His 66th Birthday 123 Lecture Notes in Computer Science 8066 Commenced Publication in 1973 Founding and Former Series Editors: Gerhard Goos, Juris Hartmanis, and Jan van Leeuwen Editorial Board David Hutchison Lancaster University, UK Takeo Kanade Carnegie Mellon University, Pittsburgh, PA, USA Josef Kittler University of Surrey, Guildford, UK Jon M. Kleinberg Cornell University, Ithaca, NY, USA Alfred Kobsa University of California, Irvine, CA, USA Friedemann Mattern ETH Zurich, Switzerland John C. Mitchell Stanford University, CA, USA Moni Naor Weizmann Institute of Science, Rehovot, Israel Oscar Nierstrasz University of Bern, Switzerland C. Pandu Rangan Indian Institute of Technology, Madras, India Bernhard Steffen TU Dortmund University, Germany Madhu Sudan Microsoft Research, Cambridge, MA, USA Demetri Terzopoulos University of California, Los Angeles, CA, USA Doug Tygar University of California, Berkeley, CA, USA Gerhard Weikum Max Planck Institute for Informatics, Saarbruecken, Germany Andrej Brodnik Alejandro López-Ortiz Venkatesh Raman Alfredo Viola (Eds.) Space-Efficient Data Structures, Streams, and Algorithms Papers in Honor of J. Ian Munro on the Occasion of His 66th Birthday 13 Volume Editors Andrej Brodnik University of Ljubljana, Faculty of Computer and Information Science Ljubljana, Slovenia and University of Primorska, -

I/O-Efficient Spatial Data Structures for Range Queries
I/O-Efficient Spatial Data Structures for Range Queries Lars Arge Kasper Green Larsen MADALGO,∗ Department of Computer Science, Aarhus University, Denmark E-mail: [email protected],[email protected] 1 Introduction Range reporting is a one of the most fundamental topics in spatial databases and computational geometry. In this class of problems, the input consists of a set of geometric objects, such as points, line segments, rectangles etc. The goal is to preprocess the input set into a data structure, such that given a query range, one can efficiently report all input objects intersecting the range. The ranges most commonly considered are axis-parallel rectangles, halfspaces, points, simplices and balls. In this survey, we focus on the planar orthogonal range reporting problem in the external memory model of Aggarwal and Vitter [2]. Here the input consists of a set of N points in the plane, and the goal is to support reporting all points inside an axis-parallel query rectangle. We use B to denote the disk block size in number of points. The cost of answering a query is measured in the number of I/Os performed and the space of the data structure is measured in the number of disk blocks occupied, hence linear space is O(N=B) disk blocks. Outline. In Section 2, we set out by reviewing the classic B-tree for solving one- dimensional orthogonal range reporting, i.e. given N points on the real line and a query interval q = [q1; q2], report all T points inside q. In Section 3 we present optimal solutions for planar orthogonal range reporting, and finally in Section 4, we briefly discuss related range searching problems. -

Parallel Range, Segment and Rectangle Queries with Augmented Maps
Parallel Range, Segment and Rectangle Queries with Augmented Maps Yihan Sun Guy E. Blelloch Carnegie Mellon University Carnegie Mellon University [email protected] [email protected] Abstract The range, segment and rectangle query problems are fundamental problems in computational geometry, and have extensive applications in many domains. Despite the significant theoretical work on these problems, efficient implementations can be complicated. We know of very few practical implementations of the algorithms in parallel, and most implementations do not have tight theoretical bounds. In this paper, we focus on simple and efficient parallel algorithms and implementations for range, segment and rectangle queries, which have tight worst-case bound in theory and good parallel performance in practice. We propose to use a simple framework (the augmented map) to model the problem. Based on the augmented map interface, we develop both multi-level tree structures and sweepline algorithms supporting range, segment and rectangle queries in two dimensions. For the sweepline algorithms, we also propose a parallel paradigm and show corresponding cost bounds. All of our data structures are work-efficient to build in theory (O(n log n) sequential work) and achieve a low parallel depth (polylogarithmic for the multi-level tree structures, and O(n) for sweepline algorithms). The query time is almost linear to the output size. We have implemented all the data structures described in the paper using a parallel augmented map library. Based on the library each data structure only requires about 100 lines of C++ code. We test their performance on large data sets (up to 108 elements) and a machine with 72-cores (144 hyperthreads).