Rt0 RANGE TREES and PRIORITY SEARCH TREES Hanan Samet
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Interval Trees Storing and Searching Intervals
Interval Trees Storing and Searching Intervals • Instead of points, suppose you want to keep track of axis-aligned segments: • Range queries: return all segments that have any part of them inside the rectangle. • Motivation: wiring diagrams, genes on genomes Simpler Problem: 1-d intervals • Segments with at least one endpoint in the rectangle can be found by building a 2d range tree on the 2n endpoints. - Keep pointer from each endpoint stored in tree to the segments - Mark segments as you output them, so that you don’t output contained segments twice. • Segments with no endpoints in range are the harder part. - Consider just horizontal segments - They must cross a vertical side of the region - Leads to subproblem: Given a vertical line, find segments that it crosses. - (y-coords become irrelevant for this subproblem) Interval Trees query line interval Recursively build tree on interval set S as follows: Sort the 2n endpoints Let xmid be the median point Store intervals that cross xmid in node N intervals that are intervals that are completely to the completely to the left of xmid in Nleft right of xmid in Nright Another view of interval trees x Interval Trees, continued • Will be approximately balanced because by choosing the median, we split the set of end points up in half each time - Depth is O(log n) • Have to store xmid with each node • Uses O(n) storage - each interval stored once, plus - fewer than n nodes (each node contains at least one interval) • Can be built in O(n log n) time. • Can be searched in O(log n + k) time [k = # -

CSE 326: Data Structures Binary Search Trees
Announcements (1/23/09) CSE 326: Data Structures • HW #2 due now • HW #3 out today, due at beginning of class next Binary Search Trees Friday. • Project 2A due next Wed. night. Steve Seitz Winter 2009 • Read Chapter 4 1 2 ADTs Seen So Far The Dictionary ADT • seitz •Data: Steve • Stack •Priority Queue Seitz –a set of insert(seitz, ….) CSE 592 –Push –Insert (key, value) pairs –Pop – DeleteMin •ericm6 Eric • Operations: McCambridge – Insert (key, value) CSE 218 •Queue find(ericm6) – Find (key) • ericm6 • soyoung – Enqueue Then there is decreaseKey… Eric, McCambridge,… – Remove (key) Soyoung Shin – Dequeue CSE 002 •… The Dictionary ADT is also 3 called the “Map ADT” 4 A Modest Few Uses Implementations insert find delete •Sets • Unsorted Linked-list • Dictionaries • Networks : Router tables • Operating systems : Page tables • Unsorted array • Compilers : Symbol tables • Sorted array Probably the most widely used ADT! 5 6 Binary Trees Binary Tree: Representation • Binary tree is A – a root left right – left subtree (maybe empty) A pointerpointer A – right subtree (maybe empty) B C B C B C • Representation: left right left right pointerpointer pointerpointer D E F D E F Data left right G H D E F pointer pointer left right left right left right pointerpointer pointerpointer pointerpointer I J 7 8 Tree Traversals Inorder Traversal void traverse(BNode t){ A traversal is an order for if (t != NULL) visiting all the nodes of a tree + traverse (t.left); process t.element; Three types: * 5 traverse (t.right); • Pre-order: Root, left subtree, right subtree 2 4 } • In-order: Left subtree, root, right subtree } (an expression tree) • Post-order: Left subtree, right subtree, root 9 10 Binary Tree: Special Cases Binary Tree: Some Numbers… Recall: height of a tree = longest path from root to leaf. -

Augmentation: Range Trees (PDF)
Lecture 9 Augmentation 6.046J Spring 2015 Lecture 9: Augmentation This lecture covers augmentation of data structures, including • easy tree augmentation • order-statistics trees • finger search trees, and • range trees The main idea is to modify “off-the-shelf” common data structures to store (and update) additional information. Easy Tree Augmentation The goal here is to store x.f at each node x, which is a function of the node, namely f(subtree rooted at x). Suppose x.f can be computed (updated) in O(1) time from x, children and children.f. Then, modification a set S of nodes costs O(# of ancestors of S)toupdate x.f, because we need to walk up the tree to the root. Two examples of O(lg n) updates are • AVL trees: after rotating two nodes, first update the new bottom node and then update the new top node • 2-3 trees: after splitting a node, update the two new nodes. • In both cases, then update up the tree. Order-Statistics Trees (from 6.006) The goal of order-statistics trees is to design an Abstract Data Type (ADT) interface that supports the following operations • insert(x), delete(x), successor(x), • rank(x): find x’s index in the sorted order, i.e., # of elements <x, • select(i): find the element with rank i. 1 Lecture 9 Augmentation 6.046J Spring 2015 We can implement the above ADT using easy tree augmentation on AVL trees (or 2-3 trees) to store subtree size: f(subtree) = # of nodes in it. Then we also have x.size =1+ c.size for c in x.children. -

Assignment 3: Kdtree ______Due June 4, 11:59 PM
CS106L Handout #04 Spring 2014 May 15, 2014 Assignment 3: KDTree _________________________________________________________________________________________________________ Due June 4, 11:59 PM Over the past seven weeks, we've explored a wide array of STL container classes. You've seen the linear vector and deque, along with the associative map and set. One property common to all these containers is that they are exact. An element is either in a set or it isn't. A value either ap- pears at a particular position in a vector or it does not. For most applications, this is exactly what we want. However, in some cases we may be interested not in the question “is X in this container,” but rather “what value in the container is X most similar to?” Queries of this sort often arise in data mining, machine learning, and computational geometry. In this assignment, you will implement a special data structure called a kd-tree (short for “k-dimensional tree”) that efficiently supports this operation. At a high level, a kd-tree is a generalization of a binary search tree that stores points in k-dimen- sional space. That is, you could use a kd-tree to store a collection of points in the Cartesian plane, in three-dimensional space, etc. You could also use a kd-tree to store biometric data, for example, by representing the data as an ordered tuple, perhaps (height, weight, blood pressure, cholesterol). However, a kd-tree cannot be used to store collections of other data types, such as strings. Also note that while it's possible to build a kd-tree to hold data of any dimension, all of the data stored in a kd-tree must have the same dimension. -

Advanced Data Structures
Advanced Data Structures PETER BRASS City College of New York CAMBRIDGE UNIVERSITY PRESS Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo Cambridge University Press The Edinburgh Building, Cambridge CB2 8RU, UK Published in the United States of America by Cambridge University Press, New York www.cambridge.org Information on this title: www.cambridge.org/9780521880374 © Peter Brass 2008 This publication is in copyright. Subject to statutory exception and to the provision of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published in print format 2008 ISBN-13 978-0-511-43685-7 eBook (EBL) ISBN-13 978-0-521-88037-4 hardback Cambridge University Press has no responsibility for the persistence or accuracy of urls for external or third-party internet websites referred to in this publication, and does not guarantee that any content on such websites is, or will remain, accurate or appropriate. Contents Preface page xi 1 Elementary Structures 1 1.1 Stack 1 1.2 Queue 8 1.3 Double-Ended Queue 16 1.4 Dynamical Allocation of Nodes 16 1.5 Shadow Copies of Array-Based Structures 18 2 Search Trees 23 2.1 Two Models of Search Trees 23 2.2 General Properties and Transformations 26 2.3 Height of a Search Tree 29 2.4 Basic Find, Insert, and Delete 31 2.5ReturningfromLeaftoRoot35 2.6 Dealing with Nonunique Keys 37 2.7 Queries for the Keys in an Interval 38 2.8 Building Optimal Search Trees 40 2.9 Converting Trees into Lists 47 2.10 -

Search Trees
Lecture III Page 1 “Trees are the earth’s endless effort to speak to the listening heaven.” – Rabindranath Tagore, Fireflies, 1928 Alice was walking beside the White Knight in Looking Glass Land. ”You are sad.” the Knight said in an anxious tone: ”let me sing you a song to comfort you.” ”Is it very long?” Alice asked, for she had heard a good deal of poetry that day. ”It’s long.” said the Knight, ”but it’s very, very beautiful. Everybody that hears me sing it - either it brings tears to their eyes, or else -” ”Or else what?” said Alice, for the Knight had made a sudden pause. ”Or else it doesn’t, you know. The name of the song is called ’Haddocks’ Eyes.’” ”Oh, that’s the name of the song, is it?” Alice said, trying to feel interested. ”No, you don’t understand,” the Knight said, looking a little vexed. ”That’s what the name is called. The name really is ’The Aged, Aged Man.’” ”Then I ought to have said ’That’s what the song is called’?” Alice corrected herself. ”No you oughtn’t: that’s another thing. The song is called ’Ways and Means’ but that’s only what it’s called, you know!” ”Well, what is the song then?” said Alice, who was by this time completely bewildered. ”I was coming to that,” the Knight said. ”The song really is ’A-sitting On a Gate’: and the tune’s my own invention.” So saying, he stopped his horse and let the reins fall on its neck: then slowly beating time with one hand, and with a faint smile lighting up his gentle, foolish face, he began.. -
Computational Geometry: 1D Range Tree, 2D Range Tree, Line
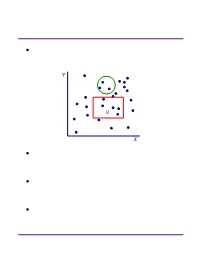
Computational Geometry Lecture 17 Computational geometry Algorithms for solving “geometric problems” in 2D and higher. Fundamental objects: point line segment line Basic structures: point set polygon L17.2 Computational geometry Algorithms for solving “geometric problems” in 2D and higher. Fundamental objects: point line segment line Basic structures: triangulation convex hull L17.3 Orthogonal range searching Input: n points in d dimensions • E.g., representing a database of n records each with d numeric fields Query: Axis-aligned box (in 2D, a rectangle) • Report on the points inside the box: • Are there any points? • How many are there? • List the points. L17.4 Orthogonal range searching Input: n points in d dimensions Query: Axis-aligned box (in 2D, a rectangle) • Report on the points inside the box Goal: Preprocess points into a data structure to support fast queries • Primary goal: Static data structure • In 1D, we will also obtain a dynamic data structure supporting insert and delete L17.5 1D range searching In 1D, the query is an interval: First solution using ideas we know: • Interval trees • Represent each point x by the interval [x, x]. • Obtain a dynamic structure that can list k answers in a query in O(k lg n) time. L17.6 1D range searching In 1D, the query is an interval: Second solution using ideas we know: • Sort the points and store them in an array • Solve query by binary search on endpoints. • Obtain a static structure that can list k answers in a query in O(k + lg n) time. Goal: Obtain a dynamic structure that can list k answers in a query in O(k + lg n) time. -

Binary Search Tree
ADT Binary Search Tree! Ellen Walker! CPSC 201 Data Structures! Hiram College! Binary Search Tree! •" Value-based storage of information! –" Data is stored in order! –" Data can be retrieved by value efficiently! •" Is a binary tree! –" Everything in left subtree is < root! –" Everything in right subtree is >root! –" Both left and right subtrees are also BST#s! Operations on BST! •" Some can be inherited from binary tree! –" Constructor (for empty tree)! –" Inorder, Preorder, and Postorder traversal! •" Some must be defined ! –" Insert item! –" Delete item! –" Retrieve item! The Node<E> Class! •" Just as for a linked list, a node consists of a data part and links to successor nodes! •" The data part is a reference to type E! •" A binary tree node must have links to both its left and right subtrees! The BinaryTree<E> Class! The BinaryTree<E> Class (continued)! Overview of a Binary Search Tree! •" Binary search tree definition! –" A set of nodes T is a binary search tree if either of the following is true! •" T is empty! •" Its root has two subtrees such that each is a binary search tree and the value in the root is greater than all values of the left subtree but less than all values in the right subtree! Overview of a Binary Search Tree (continued)! Searching a Binary Tree! Class TreeSet and Interface Search Tree! BinarySearchTree Class! BST Algorithms! •" Search! •" Insert! •" Delete! •" Print values in order! –" We already know this, it#s inorder traversal! –" That#s why it#s called “in order”! Searching the Binary Tree! •" If the tree is -

Search Trees for Strings a Balanced Binary Search Tree Is a Powerful Data Structure That Stores a Set of Objects and Supports Many Operations Including
Search Trees for Strings A balanced binary search tree is a powerful data structure that stores a set of objects and supports many operations including: Insert and Delete. Lookup: Find if a given object is in the set, and if it is, possibly return some data associated with the object. Range query: Find all objects in a given range. The time complexity of the operations for a set of size n is O(log n) (plus the size of the result) assuming constant time comparisons. There are also alternative data structures, particularly if we do not need to support all operations: • A hash table supports operations in constant time but does not support range queries. • An ordered array is simpler, faster and more space efficient in practice, but does not support insertions and deletions. A data structure is called dynamic if it supports insertions and deletions and static if not. 107 When the objects are strings, operations slow down: • Comparison are slower. For example, the average case time complexity is O(log n logσ n) for operations in a binary search tree storing a random set of strings. • Computing a hash function is slower too. For a string set R, there are also new types of queries: Lcp query: What is the length of the longest prefix of the query string S that is also a prefix of some string in R. Prefix query: Find all strings in R that have S as a prefix. The prefix query is a special type of range query. 108 Trie A trie is a rooted tree with the following properties: • Edges are labelled with symbols from an alphabet Σ. -
Range Searching
Range Searching ² Data structure for a set of objects (points, rectangles, polygons) for efficient range queries. Y Q X ² Depends on type of objects and queries. Consider basic data structures with broad applicability. ² Time-Space tradeoff: the more we preprocess and store, the faster we can solve a query. ² Consider data structures with (nearly) linear space. Subhash Suri UC Santa Barbara Orthogonal Range Searching ² Fix a n-point set P . It has 2n subsets. How many are possible answers to geometric range queries? Y 5 Some impossible rectangular ranges 6 (1,2,3), (1,4), (2,5,6). 1 4 Range (1,5,6) is possible. 3 2 X ² Efficiency comes from the fact that only a small fraction of subsets can be formed. ² Orthogonal range searching deals with point sets and axis-aligned rectangle queries. ² These generalize 1-dimensional sorting and searching, and the data structures are based on compositions of 1-dim structures. Subhash Suri UC Santa Barbara 1-Dimensional Search ² Points in 1D P = fp1; p2; : : : ; png. ² Queries are intervals. 15 71 3 7 9 21 23 25 45 70 72 100 120 ² If the range contains k points, we want to solve the problem in O(log n + k) time. ² Does hashing work? Why not? ² A sorted array achieves this bound. But it doesn’t extend to higher dimensions. ² Instead, we use a balanced binary tree. Subhash Suri UC Santa Barbara Tree Search 15 7 24 3 12 20 27 1 4 9 14 17 22 25 29 1 3 4 7 9 12 14 15 17 20 22 24 25 27 29 31 u v xlo =2 x hi =23 ² Build a balanced binary tree on the sorted list of points (keys). -

Trees, Binary Search Trees, Heaps & Applications Dr. Chris Bourke
Trees Trees, Binary Search Trees, Heaps & Applications Dr. Chris Bourke Department of Computer Science & Engineering University of Nebraska|Lincoln Lincoln, NE 68588, USA [email protected] http://cse.unl.edu/~cbourke 2015/01/31 21:05:31 Abstract These are lecture notes used in CSCE 156 (Computer Science II), CSCE 235 (Dis- crete Structures) and CSCE 310 (Data Structures & Algorithms) at the University of Nebraska|Lincoln. This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License 1 Contents I Trees4 1 Introduction4 2 Definitions & Terminology5 3 Tree Traversal7 3.1 Preorder Traversal................................7 3.2 Inorder Traversal.................................7 3.3 Postorder Traversal................................7 3.4 Breadth-First Search Traversal..........................8 3.5 Implementations & Data Structures.......................8 3.5.1 Preorder Implementations........................8 3.5.2 Inorder Implementation.........................9 3.5.3 Postorder Implementation........................ 10 3.5.4 BFS Implementation........................... 12 3.5.5 Tree Walk Implementations....................... 12 3.6 Operations..................................... 12 4 Binary Search Trees 14 4.1 Basic Operations................................. 15 5 Balanced Binary Search Trees 17 5.1 2-3 Trees...................................... 17 5.2 AVL Trees..................................... 17 5.3 Red-Black Trees.................................. 19 6 Optimal Binary Search Trees 19 7 Heaps 19 -

I/O-Efficient Spatial Data Structures for Range Queries
I/O-Efficient Spatial Data Structures for Range Queries Lars Arge Kasper Green Larsen MADALGO,∗ Department of Computer Science, Aarhus University, Denmark E-mail: [email protected],[email protected] 1 Introduction Range reporting is a one of the most fundamental topics in spatial databases and computational geometry. In this class of problems, the input consists of a set of geometric objects, such as points, line segments, rectangles etc. The goal is to preprocess the input set into a data structure, such that given a query range, one can efficiently report all input objects intersecting the range. The ranges most commonly considered are axis-parallel rectangles, halfspaces, points, simplices and balls. In this survey, we focus on the planar orthogonal range reporting problem in the external memory model of Aggarwal and Vitter [2]. Here the input consists of a set of N points in the plane, and the goal is to support reporting all points inside an axis-parallel query rectangle. We use B to denote the disk block size in number of points. The cost of answering a query is measured in the number of I/Os performed and the space of the data structure is measured in the number of disk blocks occupied, hence linear space is O(N=B) disk blocks. Outline. In Section 2, we set out by reviewing the classic B-tree for solving one- dimensional orthogonal range reporting, i.e. given N points on the real line and a query interval q = [q1; q2], report all T points inside q. In Section 3 we present optimal solutions for planar orthogonal range reporting, and finally in Section 4, we briefly discuss related range searching problems.