1.1.2. Register File
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Central Processing Unit(CPU). the Brain of Any Computer System Is the CPU
Computer Fundamentals 1'stage Lec. (8 ) College of Computer Technology Dept.Information Networks The central processing unit(CPU). The brain of any computer system is the CPU. It controls the functioning of the other units and process the data. The CPU is sometimes called the processor, or in the personal computer field called “microprocessor”. It is a single integrated circuit that contains all the electronics needed to execute a program. The processor calculates (add, multiplies and so on), performs logical operations (compares numbers and make decisions), and controls the transfer of data among devices. The processor acts as the controller of all actions or services provided by the system. Processor actions are synchronized to its clock input. A clock signal consists of clock cycles. The time to complete a clock cycle is called the clock period. Normally, we use the clock frequency, which is the inverse of the clock period, to specify the clock. The clock frequency is measured in Hertz, which represents one cycle/second. Hertz is abbreviated as Hz. Usually, we use mega Hertz (MHz) and giga Hertz (GHz) as in 1.8 GHz Pentium. The processor can be thought of as executing the following cycle forever: 1. Fetch an instruction from the memory, 2. Decode the instruction (i.e., determine the instruction type), 3. Execute the instruction (i.e., perform the action specified by the instruction). Execution of an instruction involves fetching any required operands, performing the specified operation, and writing the results back. This process is often referred to as the fetch- execute cycle, or simply the execution cycle. -

The Microarchitecture of a Low Power Register File
The Microarchitecture of a Low Power Register File Nam Sung Kim and Trevor Mudge Advanced Computer Architecture Lab The University of Michigan 1301 Beal Ave., Ann Arbor, MI 48109-2122 {kimns, tnm}@eecs.umich.edu ABSTRACT Alpha 21464, the 512-entry 16-read and 8-write (16-r/8-w) ports register file consumed more power and was larger than The access time, energy and area of the register file are often the 64 KB primary caches. To reduce the cycle time impact, it critical to overall performance in wide-issue microprocessors, was implemented as two 8-r/8-w split register files [9], see because these terms grow superlinearly with the number of read Figure 1. Figure 1-(a) shows the 16-r/8-w file implemented and write ports that are required to support wide-issue. This paper directly as a monolithic structure. Figure 1-(b) shows it presents two techniques to reduce the number of ports of a register implemented as the two 8-r/8-w register files. The monolithic file intended for a wide-issue microprocessor without hardly any register file design is slow because each memory cell in the impact on IPC. Our results show that it is possible to replace a register file has to drive a large number of bit-lines. In register file with 16 read and 8 write ports, intended for an eight- contrast, the split register file is fast, but duplicates the issue processor, with a register file with just 8 read and 8 write contents of the register file in two memory arrays, resulting in ports so that the impact on IPC is a few percent. -

Reverse Engineering X86 Processor Microcode
Reverse Engineering x86 Processor Microcode Philipp Koppe, Benjamin Kollenda, Marc Fyrbiak, Christian Kison, Robert Gawlik, Christof Paar, and Thorsten Holz, Ruhr-University Bochum https://www.usenix.org/conference/usenixsecurity17/technical-sessions/presentation/koppe This paper is included in the Proceedings of the 26th USENIX Security Symposium August 16–18, 2017 • Vancouver, BC, Canada ISBN 978-1-931971-40-9 Open access to the Proceedings of the 26th USENIX Security Symposium is sponsored by USENIX Reverse Engineering x86 Processor Microcode Philipp Koppe, Benjamin Kollenda, Marc Fyrbiak, Christian Kison, Robert Gawlik, Christof Paar, and Thorsten Holz Ruhr-Universitat¨ Bochum Abstract hardware modifications [48]. Dedicated hardware units to counter bugs are imperfect [36, 49] and involve non- Microcode is an abstraction layer on top of the phys- negligible hardware costs [8]. The infamous Pentium fdiv ical components of a CPU and present in most general- bug [62] illustrated a clear economic need for field up- purpose CPUs today. In addition to facilitate complex and dates after deployment in order to turn off defective parts vast instruction sets, it also provides an update mechanism and patch erroneous behavior. Note that the implementa- that allows CPUs to be patched in-place without requiring tion of a modern processor involves millions of lines of any special hardware. While it is well-known that CPUs HDL code [55] and verification of functional correctness are regularly updated with this mechanism, very little is for such processors is still an unsolved problem [4, 29]. known about its inner workings given that microcode and the update mechanism are proprietary and have not been Since the 1970s, x86 processor manufacturers have throughly analyzed yet. -

Memory Hierarchy
Carnegie Mellon Introduction to Cloud Computing Systems I 15‐319, spring 2010 4th Lecture, Jan 26th Majd F. Sakr 15-319 Introduction to Cloud Computing Spring 2010 © Carnegie Mellon Lecture Motivation Overview of a Cloud architecture Systems review . ISA . Memory hierarchy . OS . Networks Next time . Impact on cloud performance 15-319 Introduction to Cloud Computing 2 Spring 2010 © Carnegie Mellon Intel Open Cirrus Cloud ‐ Pittsburgh 15-319 Introduction to Cloud Computing Spring 2010 © Carnegie Mellon Blade Performance Consider bandwidth and latency between these layers Quad Core Processor Disk core core core core L1 L2 Quad Core Processor L3 core core core core L1 Memory L2 15-319 Introduction to Cloud Computing Spring 2010 © Carnegie Mellon Cloud Performance Consider bandwidth and latency of all layers 15-319 Introduction to Cloud Computing Spring 2010 © Carnegie Mellon How could these different bandwidths impact the Cloud’s performance? To understand this, we need to go through a summary of the machine’s components? 15-319 Introduction to Cloud Computing Spring 2010 © Carnegie Mellon Single CPU Machine’s Component . ISA (Processor) . Main Memory . Disk . Operating System . Network 15-319 Introduction to Cloud Computing Spring 2010 © Carnegie Mellon A Single‐CPU Computer Components Datapath Control Register PC File Main IR I/O Bridge Memory Control ALU Unit CPU I/O Bus Disk Network 15-319 Introduction to Cloud Computing Spring 2010 © Carnegie Mellon The Von Neuman machine ‐ Completed 1952 Main memory storing programs and data -

Introduction to Cpu
microprocessors and microcontrollers - sadri 1 INTRODUCTION TO CPU Mohammad Sadegh Sadri Session 2 Microprocessor Course Isfahan University of Technology Sep., Oct., 2010 microprocessors and microcontrollers - sadri 2 Agenda • Review of the first session • A tour of silicon world! • Basic definition of CPU • Von Neumann Architecture • Example: Basic ARM7 Architecture • A brief detailed explanation of ARM7 Architecture • Hardvard Architecture • Example: TMS320C25 DSP microprocessors and microcontrollers - sadri 3 Agenda (2) • History of CPUs • 4004 • TMS1000 • 8080 • Z80 • Am2901 • 8051 • PIC16 microprocessors and microcontrollers - sadri 4 Von Neumann Architecture • Same Memory • Program • Data • Single Bus microprocessors and microcontrollers - sadri 5 Sample : ARM7T CPU microprocessors and microcontrollers - sadri 6 Harvard Architecture • Separate memories for program and data microprocessors and microcontrollers - sadri 7 TMS320C25 DSP microprocessors and microcontrollers - sadri 8 Silicon Market Revenue Rank Rank Country of 2009/2008 Company (million Market share 2009 2008 origin changes $ USD) Intel 11 USA 32 410 -4.0% 14.1% Corporation Samsung 22 South Korea 17 496 +3.5% 7.6% Electronics Toshiba 33Semiconduc Japan 10 319 -6.9% 4.5% tors Texas 44 USA 9 617 -12.6% 4.2% Instruments STMicroelec 55 FranceItaly 8 510 -17.6% 3.7% tronics 68Qualcomm USA 6 409 -1.1% 2.8% 79Hynix South Korea 6 246 +3.7% 2.7% 812AMD USA 5 207 -4.6% 2.3% Renesas 96 Japan 5 153 -26.6% 2.2% Technology 10 7 Sony Japan 4 468 -35.7% 1.9% microprocessors and microcontrollers -

Introduction to Microcoded Implementation of a CPU Architecture
Introduction to Microcoded Implementation of a CPU Architecture N.S. Matloff, revised by D. Franklin January 30, 1999, revised March 2004 1 Microcoding Throughout the years, Microcoding has changed dramatically. The debate over simple computers vs complex computers once raged within the architecture community. In the end, the most popular microcoded computers survived for three reasons - marketshare, technological improvements, and the embracing of the principles used in simple computers. So the two eventually merged into one. To truly understand microcoding, one must understand why they were built, what they are, why they survived, and, finally, what they look like today. 1.1 Motivation Strictly speaking, the term architecture for a CPU refers only to \what the assembly language programmer" sees|the instruction set, addressing modes, and register set. For a given target architecture, i.e. the architecture we wish to build, various implementations are possible. We could have many different internal designs of the CPU chip, all of which produced the same effect, namely the same instruction set, addressing modes, etc. The different internal designs could then all be produced for the different models of that CPU, as in the familiar Intel case. The different models would have different speed capabilities, and probably different prices to the consumer. But the same machine languge program, say a .EXE file in the Intel/DOS case, would run on any CPU in the family. When desigining an instruction set architecture, there is a tradeoff between software and hardware. If you provide very few instructions, it takes more instructions to perform the same task, but the hardware can be very simple. -
Microcode Processor Monday, Feb
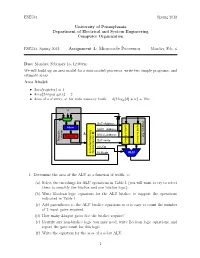
ESE534 Spring 2012 University of Pennsylvania Department of Electrical and System Engineering Computer Organization ESE534, Spring 2012 Assignment 4: Microcode Processor Monday, Feb. 6 Due: Monday, February 13, 12:00pm We will build up an area model for a microcoded processor, write two simple programs, and estimate areas. Area Model: • Area(register) = 4 • Area(2-input gate) = 2 • Area of a d-entry, w-bit wide memory bank = d(2 log2(d) + w) + 10w +1 Register File DST−Address Adder SRC1−Address A D Register SRC2−Address Counter Program DST−write (memory bank) (memory bank) ALUOp ALU Instruction Memory (memory bank) PCMode 1. Determine the area of the ALU as a function of width, w. (a) Select the encodings for ALU operations in Table 1 (you will want to try to select them to simplify the bitslice and non-bitslice logic). (b) Write Boolean logic equations for the ALU bitslice to support the operations indicated in Table 1. (c) Add parentheses to the ALU bitslice equations so it is easy to count the number of 2-input gates required. (d) How many 2-input gates doe the bitslice require? (e) Identify any non-bitslice logic you may need, write Boolean logic equations, and report the gate count for this logic. (f) Write the equation for the area of a w-bit ALU. 1 ESE534 Spring 2012 2. Determine the total area of the memory banks serving as the \register file” as a function of datapath width, w, and number of data items, r, held in each bank (i.e. the number of registers). -

Computer Architectures an Overview
Computer Architectures An Overview PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 25 Feb 2012 22:35:32 UTC Contents Articles Microarchitecture 1 x86 7 PowerPC 23 IBM POWER 33 MIPS architecture 39 SPARC 57 ARM architecture 65 DEC Alpha 80 AlphaStation 92 AlphaServer 95 Very long instruction word 103 Instruction-level parallelism 107 Explicitly parallel instruction computing 108 References Article Sources and Contributors 111 Image Sources, Licenses and Contributors 113 Article Licenses License 114 Microarchitecture 1 Microarchitecture In computer engineering, microarchitecture (sometimes abbreviated to µarch or uarch), also called computer organization, is the way a given instruction set architecture (ISA) is implemented on a processor. A given ISA may be implemented with different microarchitectures.[1] Implementations might vary due to different goals of a given design or due to shifts in technology.[2] Computer architecture is the combination of microarchitecture and instruction set design. Relation to instruction set architecture The ISA is roughly the same as the programming model of a processor as seen by an assembly language programmer or compiler writer. The ISA includes the execution model, processor registers, address and data formats among other things. The Intel Core microarchitecture microarchitecture includes the constituent parts of the processor and how these interconnect and interoperate to implement the ISA. The microarchitecture of a machine is usually represented as (more or less detailed) diagrams that describe the interconnections of the various microarchitectural elements of the machine, which may be everything from single gates and registers, to complete arithmetic logic units (ALU)s and even larger elements. -

The Implementation of Prolog Via VAX 8600 Microcode ABSTRACT
The Implementation of Prolog via VAX 8600 Microcode Jeff Gee,Stephen W. Melvin, Yale N. Patt Computer Science Division University of California Berkeley, CA 94720 ABSTRACT VAX 8600 is a 32 bit computer designed with ECL macrocell arrays. Figure 1 shows a simplified block diagram of the 8600. We have implemented a high performance Prolog engine by The cycle time of the 8600 is 80 nanoseconds. directly executing in microcode the constructs of Warren’s Abstract Machine. The imulemention vehicle is the VAX 8600 computer. The VAX 8600 is a general purpose processor Vimal Address containing 8K words of writable control store. In our system, I each of the Warren Abstract Machine instructions is implemented as a VAX 8600 machine level instruction. Other Prolog built-ins are either implemented directly in microcode or executed by the general VAX instruction set. Initial results indicate that. our system is the fastest implementation of Prolog on a commercrally available general purpose processor. 1. Introduction Various models of execution have been investigated to attain the high performance execution of Prolog programs. Usually, Figure 1. Simplified Block Diagram of the VAX 8600 this involves compiling the Prolog program first into an intermediate form referred to as the Warren Abstract Machine (WAM) instruction set [l]. Execution of WAM instructions often follow one of two methods: they are executed directly by a The 8600 consists of six subprocessors: the EBOX. IBOX, special purpose processor, or they are software emulated via the FBOX. MBOX, Console. and UO adamer. Each of the seuarate machine language of a general purpose computer. -
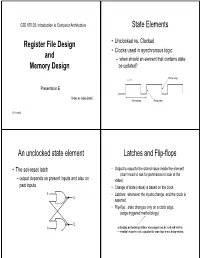
Register File Design and Memory Design State Elements An
CSE 675.02: Introduction to Computer Architecture State Elements Register File Design • Unclocked vs. Clocked • Clocks used in synchronous logic and – when should an element that contains state Memory Design be updated? Falling edge cycle time Presentation E Slides by Gojko Babić Clock period Rising edge 07/11/2005 An unclocked state element Latches and Flip-flops • The set-reset latch • Output is equal to the stored value inside the element (don't need to ask for permission to look at the – output depends on present inputs and also on value) past inputs • Change of state (value) is based on the clock R • Latches: whenever the inputs change, and the clock is Q asserted • Flip-flop: state changes only on a clock edge (edge-triggered methodology) Q S A clocking methodology defines when signals can be read and written — wouldn't want to read a signal at the same time it was being written D-latch D flip-flop • Two inputs: • Output changes only on the clock edge – the data value to be stored (D) D D Q D Q D D Q – the clock signal (C) indicating when to read & store D latch latch Q Q • Two outputs: C C – the value of the internal state (Q) and it's complement C D C Q D C C _ Q Q Q D Register File Our Implementation • The register file includes 32 32-bit registers, as it is needed for 32 general purpose registers of MIPS architecture • An edge triggered methodology 5 Read register num ber 1 Read 32 • Typical execution: data 1 5 Read register – read contents of some state elements, num ber 2 Register file – send values through some combinational logic 5 Write – write results to one or more state elements register Read 32 Write data 2 State State 32 element Combinational logic element data Write 1 2 Figure B.8.7 • This register file makes possible to simultaneously read from Clock cycle two registers and write into one register as it is appropriate for MIPS processor. -

Reducing the Complexity of the Register File in Dynamic Superscalar Processors
Reducing the Complexity of the Register File in Dynamic Superscalar Processors ¡ ¡ ¢ Rajeev Balasubramonian , Sandhya Dwarkadas , and David H. Albonesi ¡ Department of Computer Science ¢ Department of Electrical and Computer Engineering University of Rochester Abstract The register file size has a direct impact on the number of in-flight instructions since every dispatched instruction Dynamic superscalar processors execute multiple in- that has a destination register is assigned a new physical structions out-of-order by looking for independent opera- register. Hence, once the free registers run out, the dis- tions within a large window. The number of physical reg- patch stage gets stalled, causing the processor to look for isters within the processor has a direct impact on the size ILP within a restricted window until the oldest instructions of this window as most in-flight instructions require a new commit and free their registers. The growing gap between physical register at dispatch. A large multiported register memory and processor speeds results in an increasing num- file helps improve the instruction-level parallelism (ILP), ber of long latency instructions, causing the commit stage to but may have a detrimental effect on clock speed, especially be frequently stalled and further necessitating a large num- in future wire-limited technologies. In this paper, we pro- ber of registers. In addition, the large issue widths in such pose a register file organization that reduces register file processors also require a large read/write bandwidth to the size and port requirements for a given amount of ILP. We register file. Implementing a large number of registers with use a two-level register file organization to reduce register many ports for the sake of increased ILP poses a number of file size requirements, and a banked organization to reduce challenges in terms of both performance and energy. -
Lecture #3 PIC Microcontrollers
Integrated Technical Education Cluster Banna - At AlAmeeria © Ahmad © Ahmad El E-626-A Real-Time Embedded Systems (RTES) Lecture #3 PIC Microcontrollers Instructor: 2015 SPRING Dr. Ahmad El-Banna Banna Agenda - What’s a Microcontroller? © Ahmad El Types of Microcontrollers Features and Internal structure of PIC 16F877A RTES, Lec#3 , Spring Lec#3 , 2015 RTES, Instruction Execution 2 Banna What is a microcontroller? - • A microcontroller (sometimes abbreviated µC, uC or MCU) is a small computer on a single integrated circuit © Ahmad El containing a processor core, memory, and programmable input/output peripherals. • It can only perform simple/specific tasks. • A microcontroller is often described as a ‘computer-on-a- chip’. RTES, Lec#3 , Spring Lec#3 , 2015 RTES, 3 Microcomputer system and Microcontroller Banna based system - © Ahmad © Ahmad El RTES, Lec#3 , Spring Lec#3 , 2015 RTES, 4 Banna Microcontrollers.. - • Microcontrollers are purchased ‘blank’ and then programmed with a specific control program. © Ahmad El • Once programmed the microcontroller is build into a product to make the product more intelligent and easier to use. • A designer will use a Microcontroller to: • Gather input from various sensors • Process this input into a set of actions • Use the output mechanisms on the microcontroller to do something useful. RTES, Lec#3 , Spring Lec#3 , 2015 RTES, 5 Banna Types of Microcontrollers - • Parallax Propeller • Freescale 68HC11 (8-bit) • Intel 8051 © Ahmad El • Silicon Laboratories Pipelined 8051 Microcontrollers • ARM processors (from many vendors) using ARM7 or Cortex-M3 cores are generally microcontrollers • STMicroelectronics STM8 (8-bit), ST10 (16-bit) and STM32 (32-bit) • Atmel AVR (8-bit), AVR32 (32-bit), and AT91SAM (32-bit) • Freescale ColdFire (32-bit) and S08 (8-bit) • Hitachi H8, Hitachi SuperH (32-bit) • Hyperstone E1/E2 (32-bit, First full integration of RISC and DSP on one processor core [1996]) • Infineon Microcontroller: 8, 16, 32 Bit microcontrollers for Spring Lec#3 , 2015 RTES, automotive and industrial applications.