Magnetostatics in Electrostatics, Electric Fields Constant in Time Are Produced by Stationary Charges
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Basic Magnetic Measurement Methods
Basic magnetic measurement methods Magnetic measurements in nanoelectronics 1. Vibrating sample magnetometry and related methods 2. Magnetooptical methods 3. Other methods Introduction Magnetization is a quantity of interest in many measurements involving spintronic materials ● Biot-Savart law (1820) (Jean-Baptiste Biot (1774-1862), Félix Savart (1791-1841)) Magnetic field (the proper name is magnetic flux density [1]*) of a current carrying piece of conductor is given by: μ 0 I dl̂ ×⃗r − − ⃗ 7 1 - vacuum permeability d B= μ 0=4 π10 Hm 4 π ∣⃗r∣3 ● The unit of the magnetic flux density, Tesla (1 T=1 Wb/m2), as a derive unit of Si must be based on some measurement (force, magnetic resonance) *the alternative name is magnetic induction Introduction Magnetization is a quantity of interest in many measurements involving spintronic materials ● Biot-Savart law (1820) (Jean-Baptiste Biot (1774-1862), Félix Savart (1791-1841)) Magnetic field (the proper name is magnetic flux density [1]*) of a current carrying piece of conductor is given by: μ 0 I dl̂ ×⃗r − − ⃗ 7 1 - vacuum permeability d B= μ 0=4 π10 Hm 4 π ∣⃗r∣3 ● The Physikalisch-Technische Bundesanstalt (German national metrology institute) maintains a unit Tesla in form of coils with coil constant k (ratio of the magnetic flux density to the coil current) determined based on NMR measurements graphics from: http://www.ptb.de/cms/fileadmin/internet/fachabteilungen/abteilung_2/2.5_halbleiterphysik_und_magnetismus/2.51/realization.pdf *the alternative name is magnetic induction Introduction It -

Electrostatics Vs Magnetostatics Electrostatics Magnetostatics
Electrostatics vs Magnetostatics Electrostatics Magnetostatics Stationary charges ⇒ Constant Electric Field Steady currents ⇒ Constant Magnetic Field Coulomb’s Law Biot-Savart’s Law 1 ̂ ̂ 4 4 (Inverse Square Law) (Inverse Square Law) Electric field is the negative gradient of the Magnetic field is the curl of magnetic vector electric scalar potential. potential. 1 ′ ′ ′ ′ 4 |′| 4 |′| Electric Scalar Potential Magnetic Vector Potential Three Poisson’s equations for solving Poisson’s equation for solving electric scalar magnetic vector potential potential. Discrete 2 Physical Dipole ′′′ Continuous Magnetic Dipole Moment Electric Dipole Moment 1 1 1 3 ∙̂̂ 3 ∙̂̂ 4 4 Electric field cause by an electric dipole Magnetic field cause by a magnetic dipole Torque on an electric dipole Torque on a magnetic dipole ∙ ∙ Electric force on an electric dipole Magnetic force on a magnetic dipole ∙ ∙ Electric Potential Energy Magnetic Potential Energy of an electric dipole of a magnetic dipole Electric Dipole Moment per unit volume Magnetic Dipole Moment per unit volume (Polarisation) (Magnetisation) ∙ Volume Bound Charge Density Volume Bound Current Density ∙ Surface Bound Charge Density Surface Bound Current Density Volume Charge Density Volume Current Density Net , Free , Bound Net , Free , Bound Volume Charge Volume Current Net , Free , Bound Net ,Free , Bound 1 = Electric field = Magnetic field = Electric Displacement = Auxiliary -

Chapter 2 Introduction to Electrostatics
Chapter 2 Introduction to electrostatics 2.1 Coulomb and Gauss’ Laws We will restrict our discussion to the case of static electric and magnetic fields in a homogeneous, isotropic medium. In this case the electric field satisfies the two equations, Eq. 1.59a with a time independent charge density and Eq. 1.77 with a time independent magnetic flux density, D (r)= ρ (r) , (1.59a) ∇ · 0 E (r)=0. (1.77) ∇ × Because we are working with static fields in a homogeneous, isotropic medium the constituent equation is D (r)=εE (r) . (1.78) Note : D is sometimes written : (1.78b) D = ²oE + P .... SI units D = E +4πP in Gaussian units in these cases ε = [1+4πP/E] Gaussian The solution of Eq. 1.59 is 1 ρ0 (r0)(r r0) 3 D (r)= − d r0 + D0 (r) , SI units (1.79) 4π r r 3 ZZZ | − 0| with D0 (r)=0 ∇ · If we are seeking the contribution of the charge density, ρ0 (r) , to the electric displacement vector then D0 (r)=0. The given charge density generates the electric field 1 ρ0 (r0)(r r0) 3 E (r)= − d r0 SI units (1.80) 4πε r r 3 ZZZ | − 0| 18 Section 2.2 The electric or scalar potential 2.2 TheelectricorscalarpotentialFaraday’s law with static fields, Eq. 1.77, is automatically satisfied by any electric field E(r) which is given by E (r)= φ (r) (1.81) −∇ The function φ (r) is the scalar potential for the electric field. It is also possible to obtain the difference in the values of the scalar potential at two points by integrating the tangent component of the electric field along any path connecting the two points E (r) d` = φ (r) d` (1.82) − path · path ∇ · ra rb ra rb Z → Z → ∂φ(r) ∂φ(r) ∂φ(r) = dx + dy + dz path ∂x ∂y ∂z ra rb Z → · ¸ = dφ (r)=φ (rb) φ (ra) path − ra rb Z → The result obtained in Eq. -

Review of Electrostatics and Magenetostatics
Review of electrostatics and magenetostatics January 12, 2016 1 Electrostatics 1.1 Coulomb’s law and the electric field Starting from Coulomb’s law for the force produced by a charge Q at the origin on a charge q at x, qQ F (x) = 2 x^ 4π0 jxj where x^ is a unit vector pointing from Q toward q. We may generalize this to let the source charge Q be at an arbitrary postion x0 by writing the distance between the charges as jx − x0j and the unit vector from Qto q as x − x0 jx − x0j Then Coulomb’s law becomes qQ x − x0 x − x0 F (x) = 2 0 4π0 jx − xij jx − x j Define the electric field as the force per unit charge at any given position, F (x) E (x) ≡ q Q x − x0 = 3 4π0 jx − x0j We think of the electric field as existing at each point in space, so that any charge q placed at x experiences a force qE (x). Since Coulomb’s law is linear in the charges, the electric field for multiple charges is just the sum of the fields from each, n X qi x − xi E (x) = 4π 3 i=1 0 jx − xij Knowing the electric field is equivalent to knowing Coulomb’s law. To formulate the equivalent of Coulomb’s law for a continuous distribution of charge, we introduce the charge density, ρ (x). We can define this as the total charge per unit volume for a volume centered at the position x, in the limit as the volume becomes “small”. -
Magnetic Boundary Conditions 1/6
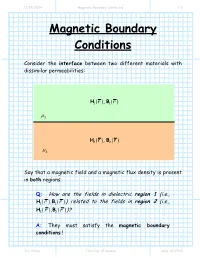
11/28/2004 Magnetic Boundary Conditions 1/6 Magnetic Boundary Conditions Consider the interface between two different materials with dissimilar permeabilities: HB11(r,) (r) µ1 HB22(r,) (r) µ2 Say that a magnetic field and a magnetic flux density is present in both regions. Q: How are the fields in dielectric region 1 (i.e., HB11()rr, ()) related to the fields in region 2 (i.e., HB22()rr, ())? A: They must satisfy the magnetic boundary conditions ! Jim Stiles The Univ. of Kansas Dept. of EECS 11/28/2004 Magnetic Boundary Conditions 2/6 First, let’s write the fields at the interface in terms of their normal (e.g.,Hn ()r ) and tangential (e.g.,Ht (r ) ) vector components: H r = H r + H r H1n ()r 1 ( ) 1t ( ) 1n () ˆan µ 1 H1t (r ) H2t (r ) H2n ()r H2 (r ) = H2t (r ) + H2n ()r µ 2 Our first boundary condition states that the tangential component of the magnetic field is continuous across a boundary. In other words: HH12tb(rr) = tb( ) where rb denotes to any point along the interface (e.g., material boundary). Jim Stiles The Univ. of Kansas Dept. of EECS 11/28/2004 Magnetic Boundary Conditions 3/6 The tangential component of the magnetic field on one side of the material boundary is equal to the tangential component on the other side ! We can likewise consider the magnetic flux densities on the material interface in terms of their normal and tangential components: BHrr= µ B1n ()r 111( ) ( ) ˆan µ 1 B1t (r ) B2t (r ) B2n ()r BH222(rr) = µ ( ) µ2 The second magnetic boundary condition states that the normal vector component of the magnetic flux density is continuous across the material boundary. -

How to Introduce the Magnetic Dipole Moment
IOP PUBLISHING EUROPEAN JOURNAL OF PHYSICS Eur. J. Phys. 33 (2012) 1313–1320 doi:10.1088/0143-0807/33/5/1313 How to introduce the magnetic dipole moment M Bezerra, W J M Kort-Kamp, M V Cougo-Pinto and C Farina Instituto de F´ısica, Universidade Federal do Rio de Janeiro, Caixa Postal 68528, CEP 21941-972, Rio de Janeiro, Brazil E-mail: [email protected] Received 17 May 2012, in final form 26 June 2012 Published 19 July 2012 Online at stacks.iop.org/EJP/33/1313 Abstract We show how the concept of the magnetic dipole moment can be introduced in the same way as the concept of the electric dipole moment in introductory courses on electromagnetism. Considering a localized steady current distribution, we make a Taylor expansion directly in the Biot–Savart law to obtain, explicitly, the dominant contribution of the magnetic field at distant points, identifying the magnetic dipole moment of the distribution. We also present a simple but general demonstration of the torque exerted by a uniform magnetic field on a current loop of general form, not necessarily planar. For pedagogical reasons we start by reviewing briefly the concept of the electric dipole moment. 1. Introduction The general concepts of electric and magnetic dipole moments are commonly found in our daily life. For instance, it is not rare to refer to polar molecules as those possessing a permanent electric dipole moment. Concerning magnetic dipole moments, it is difficult to find someone who has never heard about magnetic resonance imaging (or has never had such an examination). -
6.007 Lecture 5: Electrostatics (Gauss's Law and Boundary
Electrostatics (Free Space With Charges & Conductors) Reading - Shen and Kong – Ch. 9 Outline Maxwell’s Equations (In Free Space) Gauss’ Law & Faraday’s Law Applications of Gauss’ Law Electrostatic Boundary Conditions Electrostatic Energy Storage 1 Maxwell’s Equations (in Free Space with Electric Charges present) DIFFERENTIAL FORM INTEGRAL FORM E-Gauss: Faraday: H-Gauss: Ampere: Static arise when , and Maxwell’s Equations split into decoupled electrostatic and magnetostatic eqns. Electro-quasistatic and magneto-quasitatic systems arise when one (but not both) time derivative becomes important. Note that the Differential and Integral forms of Maxwell’s Equations are related through ’ ’ Stoke s Theorem and2 Gauss Theorem Charges and Currents Charge conservation and KCL for ideal nodes There can be a nonzero charge density in the absence of a current density . There can be a nonzero current density in the absence of a charge density . 3 Gauss’ Law Flux of through closed surface S = net charge inside V 4 Point Charge Example Apply Gauss’ Law in integral form making use of symmetry to find • Assume that the image charge is uniformly distributed at . Why is this important ? • Symmetry 5 Gauss’ Law Tells Us … … the electric charge can reside only on the surface of the conductor. [If charge was present inside a conductor, we can draw a Gaussian surface around that charge and the electric field in vicinity of that charge would be non-zero ! A non-zero field implies current flow through the conductor, which will transport the charge to the surface.] … there is no charge at all on the inner surface of a hollow conductor. -

A Problem-Solving Approach – Chapter 2: the Electric Field
chapter 2 the electric field 50 The Ekelric Field The ancient Greeks observed that when the fossil resin amber was rubbed, small light-weight objects were attracted. Yet, upon contact with the amber, they were then repelled. No further significant advances in the understanding of this mysterious phenomenon were made until the eighteenth century when more quantitative electrification experiments showed that these effects were due to electric charges, the source of all effects we will study in this text. 2·1 ELECTRIC CHARGE 2·1·1 Charginl by Contact We now know that all matter is held together by the aurae· tive force between equal numbers of negatively charged elec· trons and positively charged protons. The early researchers in the 1700s discovered the existence of these two species of charges by performing experiments like those in Figures 2·1 to 2·4. When a glass rod is rubbed by a dry doth, as in Figure 2-1, some of the electrons in the glass are rubbed off onto the doth. The doth then becomes negatively charged because it now has more electrons than protons. The glass rod becomes • • • • • • • • • • • • • • • • • • • • • , • • , ~ ,., ,» Figure 2·1 A glass rod rubbed with a dry doth loses some of iu electrons to the doth. The glau rod then has a net positive charge while the doth has acquired an equal amount of negative charge. The total charge in the system remains zero. £kctric Charge 51 positively charged as it has lost electrons leaving behind a surplus number of protons. If the positively charged glass rod is brought near a metal ball that is free to move as in Figure 2-2a, the electrons in the ball nt~ar the rod are attracted to the surface leaving uncovered positive charge on the other side of the ball. -

Gauss' Theorem (See History for Rea- Son)
Gauss’ Law Contents 1 Gauss’s law 1 1.1 Qualitative description ......................................... 1 1.2 Equation involving E field ....................................... 1 1.2.1 Integral form ......................................... 1 1.2.2 Differential form ....................................... 2 1.2.3 Equivalence of integral and differential forms ........................ 2 1.3 Equation involving D field ....................................... 2 1.3.1 Free, bound, and total charge ................................. 2 1.3.2 Integral form ......................................... 2 1.3.3 Differential form ....................................... 2 1.4 Equivalence of total and free charge statements ............................ 2 1.5 Equation for linear materials ...................................... 2 1.6 Relation to Coulomb’s law ....................................... 3 1.6.1 Deriving Gauss’s law from Coulomb’s law .......................... 3 1.6.2 Deriving Coulomb’s law from Gauss’s law .......................... 3 1.7 See also ................................................ 3 1.8 Notes ................................................. 3 1.9 References ............................................... 3 1.10 External links ............................................. 3 2 Electric flux 4 2.1 See also ................................................ 4 2.2 References ............................................... 4 2.3 External links ............................................. 4 3 Ampère’s circuital law 5 3.1 Ampère’s original -

Module 3 : MAGNETIC FIELD Lecture 20 : Magnetism in Matter
Module 3 : MAGNETIC FIELD Lecture 20 : Magnetism in Matter Objectives In this lecture you will learn the following Study magnetic properties of matter. Express Ampere's law in the presence of magnetic matter. Define magnetization and H-vector. Understand displacement current. Assemble all the Maxwell's equations together. Study properties and propagation of electromagnetic waves in vacuum. Magnetism in Matter In our discussion on electrostatics, we have seen that in the presence of an electric field, a dielectric gets polarized, leading to bound charges. The polarization vector is, in general, in the direction of the applied electric field. A similar phenomenon occurs when a material medium is subjected to an external magnetic field. However, unlike the behaviour of dielectrics in electric field, different types of material behave in different ways when an external magnetic field is applied. We have seen that the source of magnetic field is electric current. The circulating electrons in an atom, being tiny current loops, constitute a magnetic dipole with a magnetic moment whose direction depends on the direction in which the electron is moving. An atom as a whole, may or may not have a net magnetic moment depending on the way the moments due to different elecronic orbits add up. (The situation gets further complicated because of electron spin, which is a purely quantum concept, that provides an intrinsic magnetic moment to an electron.) In the absence of a magnetic field, the atomic moments in a material are randomly oriented and consequently the net magnetic moment of the material is zero. However, in the presence of a magnetic field, the substance may acquire a net magnetic moment either in the direction of the applied field or in a direction opposite to it. -

Temporal Analysis of Radiating Current Densities
Temporal analysis of radiating current densities Wei Guoa aP. O. Box 470011, Charlotte, North Carolina 28247, USA ARTICLE HISTORY Compiled August 10, 2021 ABSTRACT From electromagnetic wave equations, it is first found that, mathematically, any current density that emits an electromagnetic wave into the far-field region has to be differentiable in time infinitely, and that while the odd-order time derivatives of the current density are built in the emitted electric field, the even-order deriva- tives are built in the emitted magnetic field. With the help of Faraday’s law and Amp`ere’s law, light propagation is then explained as a process involving alternate creation of electric and magnetic fields. From this explanation, the preceding math- ematical result is demonstrated to be physically sound. It is also explained why the conventional retarded solutions to the wave equations fail to describe the emitted fields. KEYWORDS Light emission; electromagnetic wave equations; current density In electrodynamics [1–3], a time-dependent current density ~j(~r, t) and a time- dependent charge density ρ(~r, t), all evaluated at position ~r and time t, are known to be the sources of an emitted electric field E~ and an emitted magnetic field B~ : 1 ∂2 4π ∂ ∇2E~ − E~ = ~j + 4π∇ρ, (1) c2 ∂t2 c2 ∂t and 1 ∂2 4π ∇2B~ − B~ = − ∇× ~j, (2) c2 ∂t2 c2 where c is the speed of these emitted fields in vacuum. See Refs. [3,4] for derivation of these equations. (In some theories [5], on the other hand, ρ and ~j are argued to arXiv:2108.04069v1 [physics.class-ph] 6 Aug 2021 be responsible for instantaneous action-at-a-distance fields, not for fields propagating with speed c.) Note that when the fields are observed in the far-field region, the contribution to E~ from ρ can be practically ignored [6], meaning that, in that region, Eq. -

Chapter 5 Capacitance and Dielectrics
Chapter 5 Capacitance and Dielectrics 5.1 Introduction...........................................................................................................5-3 5.2 Calculation of Capacitance ...................................................................................5-4 Example 5.1: Parallel-Plate Capacitor ....................................................................5-4 Interactive Simulation 5.1: Parallel-Plate Capacitor ...........................................5-6 Example 5.2: Cylindrical Capacitor........................................................................5-6 Example 5.3: Spherical Capacitor...........................................................................5-8 5.3 Capacitors in Electric Circuits ..............................................................................5-9 5.3.1 Parallel Connection......................................................................................5-10 5.3.2 Series Connection ........................................................................................5-11 Example 5.4: Equivalent Capacitance ..................................................................5-12 5.4 Storing Energy in a Capacitor.............................................................................5-13 5.4.1 Energy Density of the Electric Field............................................................5-14 Interactive Simulation 5.2: Charge Placed between Capacitor Plates..............5-14 Example 5.5: Electric Energy Density of Dry Air................................................5-15