Extension of Communication Aeronautical Services Coverage Over the Ocean Via Antenna Optimization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Microcomputer Based Troposcatter Communications System Design Program
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 1985 TROPO: a microcomputer based troposcatter communications system design program. Siomacco, Edward Michael http://hdl.handle.net/10945/21592 DUDLEY KNOX LIBRARY NAVAL POSTG DUATE SCHOOL MONTEREY, CALIFORNIA 93943 NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS TROPO: A MICROCOMPUTER BASED TROPOSCATTER CO^IMUNI CATIONS SYSTEM DESIGN PROGRAM by Edward Michael Siomacco September 19S5 Thesis Advisor: J. B. Knorr Approved for public release; distribution is unlimited T227031 SECURITY CLASSIFICATION OF THIS PACE (When Data Entered) READ INSTRUCTIONS REPORT DOCUMENTATION PAGE BEFORE COMPLETING FORM I. REPORT NUMBER 2. GOVT ACCESSION NO 3. RECIPIENT'S CATALOG NUMBER 4. TITLE (and Submit) 5. TYPE OF REPORT & PERIOD COVERED TROPO: A Microcomputer Based Master's Thesis; Troposcatter Communications September 1985 System Design Program 6. PERFORMING ORG. REPORT NUMBER 7. AUTHORf«> 8. CONTRACT OR GRANT NUMBER!"*; Edward Michael Siomacco 9. PERFORMING ORGANIZATION NAME ANO ADDRESS 10. PROGRAM ELEMENT. PROJECT, TASK AREA & WORK UNIT NUMBERS Naval Postgraduate School Monterey, California 93943-5100 II. CONTROLLING OFFICE NAME AND AOORESS 12. REPORT DATE Naval Postgraduate School September 1985 Monterey, California 93943-5100 13. NUMBER OF PAGES 161 U. MONITORING AGENCY NAME 6 ADDRESS)'// dlllerent Irom Controlling Office) 15. SECURITY CLASS, (ol thia report) UNCLASSIFIED 15«. DECLASSIFICATION/ DOWNGRADING SCHEDULE 16. DISTRIBUTION STATEMENT (ol thl» Report) Approved for public release; distribution is unlimited. 17. DISTRIBUTION STATEMENT (ol the abatract entered In Block 20, II dlllerent from Report) 10. SUPPLEMENTARY NOTES 19. KEY WORDS (Continue on ravaraa aide II neceeeary and Identity by block number) Troposcatter; Over-the-Horizon Communications; Height Gain; Tropospheric Ducting 20. -

VHF Ionospheric Scatter System Loss Measurements European
Keierence dook nc ^ecknlcal vjote VHF IONOSPHERIC SCATTER SYSTEM LOSS MEASUREMENTS EUROPEAN-MEDITERRANEAN AREA By V. H. Goerke and 0. D. Remmier U. S. DEPARTMENT OF COMMERCE NATIONAL BUREAU OF STANDARDS THE NATIONAL BUREAU OF STANDARDS The National Bureau of Standards is a principal focal point in the Federal Government for assuring maximum application of the physical and engineering sciences to the advancement of technology in industry and commerce. Its responsibilities include development and maintenance of the national stand- ards of measurement, and the provisions of means for making measurements consistent with those standards; determination of physical constants and properties of materials; development of methods for testing materials, mechanisms, and structures, and making such tests as may be necessary, particu- larly for government agencies; cooperation in the establishment of standard practices for incorpora- tion in codes and specifications; advisory service to government agencies on scientific and technical problems; invention and development of devices to serve special needs of the Government; assistance to industry, business, and consumers in the development and acceptance of commercial standards and simplified trade practice recommendations; administration of programs in cooperation with United States business groups and standards organizations for the development of international standards of practice; and maintenance of a clearinghouse for the collection and dissemination of scientific, tech- nical, and engineering information. The scope of the Bureau's activities is suggested in the following listing of its four Institutes and their organizational units. Institute for Basic Standards. Electricity. Metrology. Heat. Radiation Physics. Mechanics. Ap- plied Mathematics. Atomic Physics. Physical Chemistry. Laboratory Astrophysics.* Radio Stand- ards Laboratory: Radio Standards Physics; Radio Standards Engineering.** Office of Standard Ref- erence Data. -

Meteor-Burst Communications: Is This What the Navy Needs?
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 1987 Meteor-burst communications: is this what the Navy needs?. Helweg, Gretchen Ann. http://hdl.handle.net/10945/22354 BDDISY K'«»"^*tTE SCHOOL NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS METEOR-BURST COMMUNICATIONS: IS THIS WHAT THE NAVY NEEDS? by Gretchen Ann Helweg JUNE 1987 Thesis Advisor: Leon B. Garden Approved for public release; distribution is unlimited T 233192 SECL« '>' ClAS^ifiCATlOM Of Thi5 PAGf REPORT DOCUMENTATION PAGE 'a SEPORT SECURITY CLASSif iCATlON 'b RESTRICTIVE MARKINGS UNCLASSIFIED 2a SECljR'TY Classification AuThQRiTy 3 DISTRIBUTION/ AVAILABILITY OF REPORT Approved for public release; 20 OEC^ASS fiCATiON . OOWNGRADiNG SCHEDULE distribution is unlimited. i PERfORMiNG ORGANIZATION REPORT NUMBERIS) 5 MONITORING ORGANIZATION REPORT NUV8£R(Sj 64 NAME Of PERFORMING ORGANIZATION 6d OFFICE SYMBOL 7a NAME OF MONITORING ORGANIZATION (If 4ppli(*ble) Naval Postgraduate School 54 Naval Postgraduate School 6c ADDRESS >Gry Stitt snd £if> Code) 7b ADDRESS {C/fy. Stttr *nd ZIP Code) Monterey, California 93943-5000 Monterey, California 93943-5000 3a NAME OF Funding ' SPONSORING 8b OFFICE SYMBOL 9 PROCUREMENT INSTRUMENT lOEN'iFiCATlON NUMBER ORGANIZATION {If ipplicible) 8c AOORESS(C/ry Slate ind ZIP Code) 10 SOURCE OF FUNDING NUMBERS PROGRAM PROJECT TASK WORK ^Nl^ ELEMENT NO NO NO ACCESS:ON NO '' ' >£ {iniiuOe Security Clmificttion) METEOR-BURST COMMUNICATIONS IS THIS WHAT THE NAVY NEEDS? Helweg, Gretchen A. 35 "'ME COVERED 4 DATE OF REPORT (Yetr Month Day) S PAGE CO^NT Master's Thesis cooM ^O 1987 June 115 •6 S^'-.-;V£','APr NO'A'ON coSA' co:>cS '8 SuBjECT 'ERMS (Continue on reverie if neceuary arid identify by block number) GROUP SuB-GROUP Telecommunications, Communications A. -

The Wireless Toolbox
The Wireless Toolbox A Guide To Using Low-Cost Radio Communication Systems for Telecommunication in Developing Countries - An African Perspective International Research Development Centre (IDRC) January 1999 PREFACE/SUMMARY VI 1. INTRODUCTION I 2. A RADIO COMMUNICATIONS PRIMER 3 2.1 SIGNAL FREQUENCY 3 2.2 LINK CAPACITY 5 2.3 ANTENNAE AND CABLING 6 2.4 MOBILITY FACTORS 7 2.5 SHARED ACCESS HUBS 7 2.6 BANDWIDTH REQUIREMENTS 8 2.7 REGULATIONS ON THE USE OF RADIO FREQUENCIES 8 2.8 WIRELESS TECHNOLOGY STANDARDISATION 11 2.9 WIRELESS DATA NETWORK DESIGN AND DATA TERMINAL EQUIPMENT (DTE) INTERFACES ... 11 2.10 COSTS 12 3. WIRELESS COMMUNICATION SYSTEMS 13 3.1 MOBILE VOICE RADIOS/WALKIE TALKIES 13 3.2 HF RADIO 13 3.3 VHF AND UHF NARROWBAND PACKET RADIO 15 3.4 SATELLITE SERVICES 16 3.5 STRATOSPHERIC TELECOMMUNICATION SERVICES 23 3.6 WIDEBAND, SPREAD SPECTRUM AND WIRELESS LAN/MANs 23 3.7 OPTIC SYSTEMS 25 3.8 ELECTRIC POWER GRID TRANSMISSION 25 3.9 DATA BROADCASTING 25 3.10 GATEWAYS AND HYBRID SYSTEMS 26 3.11 WLL AND CELLULAR TELEPHONY SYSTEMS 26 4. IMPLEMENTATION ISSUES 30 4.1 SOURCING AND TRAINING 30 4.2 POWER SUPPLY 30 4.3 OPERATING TEMPERATURES, HUMIDITY AND OTHER ENVIRONMENTAL FACTORS 30 4.4 INSTALLATIONS AND SITE SURVEYS 31 4.5 HEALTH ISSUES 31 4.6 GENERAL CHECKLIST 31 5. PRODUCT & SERVICE DETAILS 33 5.1 MOBILE VOICE RADIOS / WALKIE TALKIES 33 5.1.1 Motorola P110 handheld portable radio (2 channel, 5 W) 33 5.1.2 Kenwood TK 260 mobile portable radio 33 5.1.3 Kenwood TKR 720NM fixed repeater 150-174 MHz. -
Scattering of Electromagnetic Waves in the Troposphere and the Use of This Technique for Communications
Proceedings of the Iowa Academy of Science Volume 67 Annual Issue Article 52 1960 Scattering of Electromagnetic Waves in the Troposphere and the Use of This Technique For Communications Irvin H. Gerks Collins Radio Company Let us know how access to this document benefits ouy Copyright ©1960 Iowa Academy of Science, Inc. Follow this and additional works at: https://scholarworks.uni.edu/pias Recommended Citation Gerks, Irvin H. (1960) "Scattering of Electromagnetic Waves in the Troposphere and the Use of This Technique For Communications," Proceedings of the Iowa Academy of Science, 67(1), 399-430. Available at: https://scholarworks.uni.edu/pias/vol67/iss1/52 This Research is brought to you for free and open access by the Iowa Academy of Science at UNI ScholarWorks. It has been accepted for inclusion in Proceedings of the Iowa Academy of Science by an authorized editor of UNI ScholarWorks. For more information, please contact [email protected]. Gerks: Scattering of Electromagnetic Waves in the Troposphere and the Us Scattering of Electromagnetic Waves in the Troposphere and the Use of This Technique For Communications IRVIN H. GERKs1 Abstract. This article is an introduction to the subject of · tropospheric scatter propagation for the non-specialist. It opens with a review of various modes of propagation which may exist in a non-turbulent atmosphere, such as diffraction and ionospheric reflection. The scattering of energy in a turbulent medium is then examined, and statistical methods are introduced to describe the resultant field. Special characteristics of the signal are dis cussed, such as variation with distance, climatic effects, frequency dependence, fading, bandwidth, and noise level. -
Bibliography on Tropospheric Propagation of Radio Waves
National Bureau of Standards Library, M.W. Bldg APR 8 1965 ^ecknical ^iote 304 BIBLIOGRAPHY ON TROPOSPHERIC PROPAGATION OF RADIO WAVES WILHELM NUPEN mm U. S. DEPARTMENT OF COMMERCE NATIONAL BUREAU OF STANDARDS THE NATIONAL BUREAU OF STANDARDS The National Bureau of Standards is a principal focal point in the Federal Government for assuring maximum application of the physical and engineering sciences to the advancement of technology in industry and commerce. Its responsibilities include development and maintenance of the national stand- ards of measurement, and the provisions of means for making measurements consistent with those standards; determination of physical constants and properties of materials; development of methods for testing materials, mechanisms, and structures, and making such tests as may be necessary, particu- larly for government agencies; cooperation in the establishment of standard practices for incorpora- tion in codes and specifications; advisory service to government agencies on scientific and technical problems; invention and development of devices to serve special needs of the Government; assistance to industry, business, and consumers in the development and acceptance of commercial standards and simplified trade practice recommendations; administration of programs in cooperation with United States business groups and standards organizations for the development of international standards of practice; and maintenance of a clearinghouse for the collection and dissemination of scientific, tech- nical, and engineering information. The scope of the Bureau's activities is suggested in the following listing of its four Institutes and their organizational units. Institute for Basic Standards. Electricity. Metrology. Heat. Radiation Physics. Mechanics. Ap- plied Mathematics. Atomic Physics. Physical Chemistry. Laboratory Astrophysics.* Radio Stand- ards Laboratory: Radio Standards Physics; Radio Standards Engineering.** Office of Standard Ref- erence Data. -

Radio Wave Propagation
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 1, Ver. V (Feb. 2014), PP 17-19 www.iosrjournals.org Radio Wave Propagation Vatsal Modi (ECE, Manipal University Jaipur, India) Abstract: This thesis deals with Radio Wave Propagation in environments where the propagation is severely influenced by surrounding objects, mainly walls and other building structures. As an introduction, a brief description is given on propagation terms like loss, delay and dispersion along with system functions relevant for the topic. The focus is then placed on propagation from an outdoor transmitter to an indoor receiver at frequency bands aimed at personal communications and wireless local area networks. Penetration loss is measured at 1.8 and 5.8 GHz for various small scale wall and window structures. Empirical models have been evaluated for the dependence on incidence angle in order to provide a simple yet accurate model for the loss. I. Introduction : The advent of the Marconi Wireless in 1895 made possible transmission of messages in the form of Radio Waves. The frequency falling between 3 KHz to 300 GHz are called Radio Frequencies since they are commonly used in Radio Communication. We know that the Radio Frequency spectrum divided into different frequency bands. The basic principles that enable Radio Waves to be propagated through space are the same today as they were 100 years ago. Some people view Radio Wave Propagation confusing as it lacks the senses of sight and touch. Now talking about the mechanism of Radio Wave Propagation, I want to include that Radio Wave Propagation related with the phenomena that occur in the medium between transmitting antenna and receiving antenna.When a signal is transmitted from transmitter antenna, the Radio Wave which is actually radiated from antenna is spread in all directions. -

Introduction to International Radio Regulations
Introduction to International Radio Regulations Ryszard Struzak∗ Information and Communication Technologies Consultant Lectures given at the School on Radio Use for Information And Communication Technology Trieste, 2-22 February 2003 LNS0316001 ∗ [email protected] 2 R. Struzak Abstract These notes introduce the ITU Radio Regulations and related UN and WTO agreements that specify how terrestrial and satellite radio should be used in all countries over the planet. Access to the existing information infrastructure, and to that of the future Information Society, depends critically on these regulations. The paper also discusses few problems related to the use of the radio frequencies and satellite orbits. The notes are extracted from a book under preparation, in which these issues are discussed in more detail. Introduction to International Radio Regulations 3 Contents 1. Background 5 2. ITU Agreements 25 3. UN Space Agreements 34 4. WTO Trade Agreements 41 5. Topics for Discussion 42 6. Concluding Remarks 65 References 67 List of Abbreviations 70 ANNEX: Table of Frequency Allocations (RR51-RR5-126) 73 Introduction to International Radio Regulations 5 1 Background After a hundred years of extraordinary development, radio is entering a new era. The converging computer and communications technologies add “intelligence” to old applications and generate new ones. The enormous impact of radio on the society continues to increase although we still do not fully understand all consequences of that process. There are numerous areas in which the radio frequency spectrum is vital. National defence, public safety, weather forecasts, disaster warning, air-traffic control, and air navigation are a few examples only. -
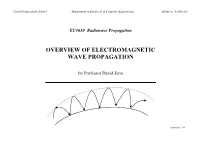
Overview of Electromagnetic Wave Propagation
Naval Postgraduate School Department of Electrical & Computer Engineering Monterey, California EC3630 Radiowave Propagation OVERVIEW OF ELECTROMAGNETIC WAVE PROPAGATION by Professor David Jenn (version1.2.4) Naval Postgraduate School Department of Electrical & Computer Engineering Monterey, California Propagation of Electromagnetic Waves Radiating systems must operate in a complex changing environment that interacts with propagating electromagnetic waves. Commonly observed propagation effects are depicted below. 5 IONOSPHERE SATELLITE 1 DIRECT “SPACE WAVE” 4 2 REFLECTED 6 3 SURFACE WAVE / GROUND WAVE 1 4 TROPOSCATTER 5 IONOSPHERIC BOUNCE 2 “SKY WAVE” 6 SATELLITE RELAY 3 TRANSMITTER RECEIVER EARTH The troposphere is the lower region of the atmosphere (less than 10 km). The ionosphere: is the upper region of the atmosphere (50 km to 1000 km). The effects on waves include reflection, refraction, diffraction, attenuation, scattering, and depolarization. 1 Naval Postgraduate School Department of Electrical & Computer Engineering Monterey, California Survey of Propagation Mechanisms (1) There are may propagation mechanisms by which signals can travel between the transmitter and receiver. Except for line-of-sight (LOS) paths, their effectiveness is generally a strong function of the frequency and transmitter-receiver geometry and frequency. 1. direct path or "line of sight" (most radars; SHF links from ground to satellites) RX TX o o SURFACE 2. direct plus earth reflections or "multipath" (UHF broadcast; ground-to-air and air- to-air communications) TX o o RX SURFACE 3. ground wave (AM broadcast; Loran C navigation at short ranges) TX RX o o SURFACE 2 Naval Postgraduate School Department of Electrical & Computer Engineering Monterey, California Survey of Propagation Mechanisms (2) 4. -

Characteristics of Point-To-Point Tropospheric Propagation and Siting Considerations
PB161596 NBS ecknic&l tiote 92c. 95 ^Boulder laboratories CHARACTERISTICS OF POINT-TO-POINT TROPOSPHERIC PROPAGATION AND SITING CONSIDERATIONS BY R. S. KIRBY, P. L. RICE, AND L. J. MALONEY U. S. DEPARTMENT OF COMMERCE NATIONAL BUREAU OF STANDARDS THE NATIONAL BUREAU OF STANDARDS Functions and Activities The functions of the National Bureau of Standards are set forth in the Act of Congress, March 3, 1901, as amended by Congress in Public Law 619, 1950. These include the development and maintenance of the na- tional standards of measurement and the provision of means and methods for making measurements consistent with these standards; the determination of physical constants and properties of materials; the development of methods and instruments for testing materials, devices, and structures; advisory services to government agen- cies on scientific and technical problems; invention and development of devices to serve special needs of the Government; and the development of standard practices, codes, and specifications. The work includes basic and applied research, development, engineering, instrumentation, testing, evaluation, calibration services, and various consultation and information services. Research projects are also performed for other government agencies when the work relates to and supplements the basic program of the Bureau or when the Bureau's unique competence is required. The scope of activities is suggested by the listing of divisions and sections on the inside of the back cover. Publications The results of the Bureau's research -
3. Spectrum Requirements ……………………………………………………………… 17
Spectrum Requirements for the Amateur and Amateur-satellite Services Revised 20 August 2008 Administrative Council International Amateur Radio Union PO Box 310905 Newington, CT 06131-0905 USA Spectrum Requirements for the Page 2 Amateur and Amateur-Satellite Services IARU Administrative Council, 20 August 2008 Contents Page Executive Summary ………………………………………………………………………….. 3 1. Introduction ………………………………………………………………………….. 4 2. Existing Allocations …………………………………………………………………. 5 3. Spectrum Requirements ……………………………………………………………… 17 Spectrum Requirements for the Page 3 Amateur and Amateur-Satellite Services IARU Administrative Council, 20 August 2008 Executive Summary Spectrum is the lifeblood of Amateur Radio. As a result of work of the International Amateur Radio Union and its Member Societies since 1925, the Amateur and Amateur-Satellite Services have a number of small frequency bands scattered throughout the radiofrequency spectrum. The IARU objective is to protect these allocations, promote their continued use and pursue modest amounts of additional spectrum to satisfy dynamic requirements. The most recent allocation action was that the 2007 World Radiocommunication Conference made a worldwide secondary allocation of the low-frequency band 135.7-137.8 kHz to the Amateur Service subject to certain footnotes. The 7200-7300 kHz band was maintained in Region 2 but not extended to the other Regions. IARU did not achieve its objective of a new band around 5 MHz at WRC-07 nor its placement on a future Agenda. WRC-07 adopted some footnotes to permit International Mobile Telecommunications (IMT) in bands at 2.3 and 3.4 GHz in certain countries, which may impact the use of these bands by the Amateur Services. The 2007 conference adopted an Agenda item for WRC-11 to consider an allocation of 15 kHz around 500 kHz. -

Prolonged Space-Wave Fadeouts in Tropospheric Propagation Albrecht P
---v---- JOURNAL OF RESEARCH of the National Bureau of Standards-D. Radio Propagation Vol. 66D, No. 6, November-December 1962 Prolonged Space-Wave Fadeouts in Tropospheric Propagation Albrecht P. Barsis and Mary Ellen Johnson Contribution From Central Radio Propagation Laboratory, National Bureau of Standards, Boulder, Colo. (R eceived May 3, 1962; revised June 12, 1962) This paper contains the results of studies performed during the last several years on t he short-term variability of t ropospheric signals received over within-the-horizon paths in Colorado and California. Signal variations of the type observed over such paths have been t ermed "prolonged space-wavE' fadeouts." They are analyzed as a function of carrier frequency, path characteristics, and meteorological parameters. The study also includes an evaluation of fadeouts observed over a path using a mountain peak as a diffracting knife-edge obstacle between transmitter and receiver. Principal results show a stronger diurnal trend of fadeout incidence in continental climates than in ma ritirne climates. A significant dependence of t he fadeout characteristics on the refractive index structure has been observed in maritime climates. In general, fadeouts tend to be more frequent but of shorter duration for higher fre quencies. There are also indications that the occurrence of fadeout is well correlated on vertically spaced antennas. Thus, conventional space divers ity t echniques may not be effective to increase the reliability of systems operating over within-the-horizon paths. 1. Introduction contained in the NBS Technical Note [Barsis and Johnson, 1961]. Two of the paths (including the A recent NBS Technical Note [Barsis and Johnson, knife-edge diffraction or obstacle-gain path) were 1961] contained detailed results on measurements oJ located in Eastern Colorado, which represents a short-term fading characteristics observed over continental, dry climate.