Nonmechanical Multizoom Telescope Design Using a Liquid Crystal Spatial Light Modulator and Focus-Correction Algorithm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tessar and Dagor Lenses
Tessar and Dagor lenses Lens Design OPTI 517 Prof. Jose Sasian Important basic lens forms Petzval DB Gauss Cooke Triplet little stress Stressed with Stressed with Low high-order Prof. Jose Sasian high high-order aberrations aberrations Measuring lens sensitivity to surface tilts 1 u 1 2 u W131 AB y W222 B y 2 n 2 n 2 2 1 1 1 1 u 1 1 1 u as B y cs A y 1 m Bstop ystop n'u' n 1 m ystop n'u' n CS cs 2 AS as 2 j j Prof. Jose Sasian Lens sensitivity comparison Coma sensitivity 0.32 Astigmatism sensitivity 0.27 Coma sensitivity 2.87 Astigmatism sensitivity 0.92 Coma sensitivity 0.99 Astigmatism sensitivity 0.18 Prof. Jose Sasian Actual tough and easy to align designs Off-the-shelf relay at F/6 Coma sensitivity 0.54 Astigmatism sensitivity 0.78 Coma sensitivity 0.14 Astigmatism sensitivity 0.21 Improper opto-mechanics leads to tough alignment Prof. Jose Sasian Tessar lens • More degrees of freedom • Can be thought of as a re-optimization of the PROTAR • Sharper than Cooke triplet (low index) • Compactness • Tessar, greek, four • 1902, Paul Rudolph • New achromat reduces lens stress Prof. Jose Sasian Tessar • The front component has very little power and acts as a corrector of the rear component new achromat • The cemented interface of the new achromat: 1) reduces zonal spherical aberration, 2) reduces oblique spherical aberration, 3) reduces zonal astigmatism • It is a compact lens Prof. Jose Sasian Merte’s Patent of 1932 Faster Tessar lens F/5.6 Prof. -

Cooke Triplet
Cooke triplet Lens Design OPTI 517 Prof. Jose Sasian Cooke triplet • A new design • Enough variables to correct all third– order aberrations • Thought of as an afocal front and an imaging rear • 1896 • Harold Dennis Taylor Prof. Jose Sasian Cooke triplet field-speed trade-off’s 24 deg @ f/4.5 27 deg @ f/5.6 Prof. Jose Sasian Aberration correction • Powers, glass, and separations for: power, axial chromatic, field curvature, lateral color, and distortion. Lens bendings, for spherical aberration, coma, and astigmatism. Symmetry. •Power: yaa ybb ycc ya 2 2 2 •Axial color: ya a /Va yb b /Vb yc c /Vc 0 • Lateral color: ya yaa /Va yb ybb /Vb yc ycc /Vc 0 • Field curvature: a / na b / nb c / nc 0 Prof. Jose Sasian • Crossing of the sagittal and tangential field is an indication of the balancing of third-order, fifth-order astigmatism, field curvature, and defocus. Prof. Jose Sasian The strong power of the first positive lens leads to spherical aberration of the pupil which changes the chief ray high whereby inducing significant higher order aberrations. Y y ay 3 Y 2 y 2 2ay 4 a2 y 6 2 W222 Y 2 W422 ay W222 Prof. Jose Sasian Cooke triplet example from Geiser OE •5 waves scale •visible F1=34 mm F2=-17 mm F3=24 mm 1 STANDARD 23.713 4.831 LAK9 2 STANDARD 7331.288 5.86 STO STANDARD -24.456 0.975 SF5 4 STANDARD 21.896 4.822 5 STANDARD 86.759 3.127 LAK9 6 STANDARD -20.4942 41.10346 IMA STANDARD Infinity From Geiser OE f/4 at +/- 20 deg. -
Triplet Design Following Geary's Procedure
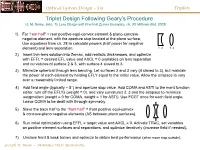
Optical System Design – S15 Triplets Triplet Design Following Geary’s Procedure (J. M. Geary, Intro. To Lens Design with Practical Zemax Examples, ch. 30, Willman-Bell, 2002) 1) For “rear half” = rear positive equi-convex element & plano-concave negative element, with the aperture stop located at the plano surface, Use equations from ch. 28 to calculate powers (half power for negative element) and lens separation. 1 2 3 4 2) Insert thin-lens solution into Zemax, add realistic thicknesses, and optimize with EFFL = desired EFL value and AXCL = 0 (variables on lens separation and curvatures of surface 2 & 3, with surface 4 slaved to 3. 3) Minimize spherical through lens bending. Let surfaces 2 and 3 vary (4 slaved to 3), but maintain the power of each element by holding EFLY equal to the initial value. Allow the airspace to vary over a reasonably limited range. 4) Add field angle (typically ~ 5°) and aperture stop value. Add COMA and ASTI to the merit function editor, turn off the EFLYs (weight = 0), and vary curvatures 2, 3 and the airspace to minimize astigmatism (weight = 0 for COMA, weight = 1 for ASTI). Use FCGT once for each field angle. Leave COMA to be dealt with through symmetry. 5) Slave the back half to the “front half” = front positive equi-convex & concave-plano negative elements (AS between plano surfaces). 6) Run initial optimization using EFFL = target value and AXCL = 0. Activate TRAC, set variables on positive-element surfaces and separations, and optimize iteratively (increase field if needed). 7) Unslave front & back halves and optimize to obtain best performance (often move stop outside). -

B & W (Walter Biermann and Johannes Weber), Berlin, Germany
B & W (Walter Biermann and Johannes Weber), Berlin, Germany. They started in Berlin in 1947 making high grade optical filters (color filters) and using Schott glass. They made filters under contract to many (most?) of the leading German firms inc Leica, Hasselblad, Rollei, as well as selling today (2000) under their own name. It is therefore interesting to compare the mounts of some in-house filters and also non-official ones and this explains why they are often so alike. (see advert. Fieldgrass and Gale, Am. Photo. 07/04/2001, p91. Back, F.G. Back (1902-1983) was responsible for a number of developments in early zoom lenses. For 16mm these were available from 1946. His Zoomar Corp. dates from 1951. See especially Voigtlaender for the Zoomar lens. Baker/Baker-Nunn, USA. Specialist makers of high quality aerial survey cameras, initiated at Harvard in WW2 using K22 cameras. Products included first a f5.0 40in lens, then f6.3 60in and f10 100in by 1947. These were thermostatted in use for optimum performance. Later there was a f8.0 144in, for 28x28in in 1960, mirror optics for tracking such as a f1.0 24in and a f4.0 64in. (The layout of the 40in is shown in Bak 001). (See also Polaroid for a J.Baker and W.Plummer designed lens, possibly the same firm.) Balbreck Aine' et Fils, France. Balbreck were licencees for the Cooke triplet, from TTH of Leicester, along with Mssrs Voigtlaender of Germany. Balbreck lenses do not seem to be common, but one has been mentioned as a f16 290mm RR on a Guyard hand-and-stand camera. -

Download Paper
Lens systems for sky surveys and space surveillance John T. McGraw University of New Mexico Mark R. Ackermann Sandia National Laboratories Peter C. Zimmer Go Green Termite University of New Mexico ABSTRACT Since the early days of astrophotography, lens systems have played a key role in capturing images of the night sky. The first images were attempted with visual refractors. These were soon followed with color- corrected refractors and finally specially designed photo-refractors. Being telescopes, these instruments were of long-focus and imaged narrow fields of view. Simple photographic lenses were soon put into service to capture wide-field images. These lenses also had the advantage of requiring shorter exposure times than possible using large refractors. Eventually, lenses were specifically designed for astrophotography. With the introduction of the Schmidt-camera and related catadioptric systems, the popularity of astrograph lenses declined, but surprisingly, a few remained in use. Over the last 30 years, as small CCDs have displaced large photographic plates, lens systems have again found favor for their ability to image great swaths of sky in a relatively small and simple package. In this paper, we follow the development of lens-based astrograph systems from their beginnings through the current use of both commercial and custom lens systems for sky surveys and space surveillance. Some of the optical milestones discussed include the early Petzval-type portrait lenses, the Ross astrographic lens and the current generation of optics such as the commercial 200mm camera lens by Canon. We preview our astrograph designs for commonly available CCD detectors. 1. INTRODUTION Telescopes are usually built to address specific scientific questions, with angular field of view and image resolution being the usual primary design parameters. -
Cooke Triplet Lenses Cooke Triplet Is a Well-Know Lens Form That Provides Good Imaging Performance Over a Field of View of +/- 20-25 Degrees
´ Telecentric Imaging Object space telecentricity stop source: edmund optics The 5 classical Seidel Aberrations First order aberrations Spherical Aberration (~r4) Origin: different focal lengths for different ray heights Spherical aberration. A perfect lens (top) focuses all incoming rays to a point on the optic axis. A real lens with spherical surfaces (bottom) suffers from spherical aberration: it focuses rays more tightly if they enter it far from the optic axis than if they enter closer to the axis. It therefore does not produce a perfect focal point. 4 Getting rid of Spherical Aberration (~r ) by balancing with defocus 4 Getting rid of Spherical Aberration (~r ) • Lens bending (b) • Lens splitting (c) • High refractive index • Aspheric lenses (d) 4 Getting rid of Spherical Aberration (~r ) Effect of lens bending 4 Getting rid of Spherical Aberration (~r ) Effect of material choice and # of elements Coma (~ r3 cos ) Origin: Non-symmetry of bundle around chief ray “non-symmetry error“ strong ray bending weak ray bending Getting rid of Coma (~ r3 cos ) Move stop! Astigmatism (~ 2 r2 cos2 ) Origin: different optical powers in x and y due to oblique incidence / projection Astigmatism (~ 2 r2 cos2 ) sagittal tangential image surface Gaussian image image plane surface tangential crossection Correction by applying menisc lenses sagittal crosssection Field curvature (~ 2 r2) Origin: natural image surface is spherical, not planar “Petzval curvature“ • Make Petzval sum equal zero! • Balance with astigmatism! The Cooke Triplet Cooke triplet lenses Cooke triplet is a well-know lens form that provides good imaging performance over a field of view of +/- 20-25 degrees. Many consumer grade film cameras use lenses of this type. -

Computer Predesign of Cooke Triplet Anastigmat Frank Vanek
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 5-16-1975 Computer Predesign of Cooke Triplet Anastigmat Frank Vanek Follow this and additional works at: http://scholarworks.rit.edu/theses Recommended Citation Vanek, Frank, "Computer Predesign of Cooke Triplet Anastigmat" (1975). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. Undergraduate Thesis Title: Computer Predesign of Cooke Triplet Anastigmat Submitted by: Frank Vanek On: 16 May, 1975 To: ROCHESTER INSTITUTE OF TECHNOLOGY Department of Photographic Science and Instrumentation Thesis Advisor: John Carson yz^n Abstract: There are many methods for designing the Cooke Triplet Anastigmat. In this thesis, one of them is programmed into a computer in BASIC language. Because of the length of the program, it had to be split into two separate programs using a data file to save data produced by the first and needed by the second. The first program uses the equation for system power, and the equations for Petzval curvature, longitudinal and lateral chromatic aberrations, space ratio to solve for the powers and spacings of the elements. Solution is accomplished by the Crout method of simultaneous equation solution and by iteration. The second program solves for the bendings of the elements. Assuming a value for the first curvature, it solves for the second and third using the equations for coma and astigmatism, respectivly. -
Control of Linear Astigmatism Aberration in a Perturbed Axially Symmetric Optical System and Tolerancing
applied sciences Article Control of Linear Astigmatism Aberration in a Perturbed Axially Symmetric Optical System and Tolerancing José Sasián Wyant College of Optical Sciences, University of Arizona, 1630 E University Boulevard, Tucson, AZ 85721, USA; [email protected] Abstract: Linear astigmatism aberration is undesirable because it rapidly degrades image quality. We discuss some techniques to control and mitigate this aberration, and provide a comparison of lens systems that have been desensitized for linear astigmatism aberration. Keywords: linear astigmatism; lens tolerancing; lens desensitizing 1. Introduction Axially symmetric lens systems are often required to be aplanatic to provide sharp imaging at least in a central portion of the system’s field of view. The current meaning of the term aplanatic is freedom from spherical aberration and coma aberration. However, the meaning can be defined as absence of uniform and linear field-dependent aberrations. Aplanatism is a very desirable property because it provides sharp imaging and ease of lens alignment. Because of lens fabrication and assembly errors, there are not in practice perfect Citation: Sasián, J. Control of Linear axially symmetric systems but perturbed optical systems [1–3]. Astigmatism Aberration in a When the axial symmetry is lost the first aberrations that can be present, in addition Perturbed Axially Symmetric Optical to the aberrations of axially symmetric systems, are uniform astigmatism, uniform coma, System and Tolerancing. Appl. Sci. linear astigmatism, field tilt, and smile and keystone distortion [4]. Then, under pertur- 2021, 11, 3928. https://doi.org/ bation and to keep aplanatism one must correct for uniform astigmatism, uniform coma, 10.3390/app11093928 and linear astigmatism aberration. -
E-List 56 Trade Catalogues
ANDREW CAHAN: BOOKSELLER, LTD SPECIALIZING IN PHOTOGRAPHIC LITERATURE PO BOX 5403 AKRON, OHIO 44334 Member of ABAA & ILAB By Appt Tel: 330.252.0100 Fax: 330.252.0100 [email protected] • www.cahanbooks.com E-LIST 56 TRADE CATALOGUES 1. A.F. Kern Company, Manufacturers. THE A.F. KERN COMPANY MANUFACTURERS: SPRING AND FALL SEASON 1904... CATALOGUE NO. 15, FIFTEENTH YEAR. Boston: A.F. Kern Company, Manufacturers, 1904. 4to., 128 pp., numerous illustrations. Color illustrated stiff wrappers, which are moderately soiled, chipped and worn; upper tip slightly bumped. Very good. A priced trade catalogue of picture and portrait frames, mat boards, pastel and watercolors, platinotype and carbon photographs, facsimiles of plain and hand-colored photographs, picture and room moldings, etc. $200.00 2. Agfa Ansco. AGFA ANSCO MATERIALS FOR PROFESSIONAL PHOTOGRAPHIC USE: CAMERAS AND EQUIPMENT, FILMS, PAPERS, CHEMICALS. REVISED TO APRIL 1, 1940. Binghamton, NY: Agfa Ansco Corporation, 1940. Small 8vo., 47, [1] pp., illustrations from photographs. Stiff paper wrappers. Very good. Each product thoroughly explained; includes a lengthy index and prices. $40.00 3. Agfa Ansco. AGFA ANSCO MATERIALS FOR PROFESSIONAL PHOTOGRAPHIC USE: CAMERAS, PAPER, FILMS, CHEMICALS. Catalog 54 P. Binghamton, NY: Agfa Ansco Corporation, [1936]. Revised to January 1, 1936. Small 8vo., [52] pp., illustrations from photographs. Stiff paper wrappers, which are rubbed; one 4 pp. signature is detached, small stain to the blank margin of a few leaves, ink additions and revisions to some prices. Very good. [with] DESCRIPTIVE PRICE LIST OF AGFA PROFESSIONAL FILMS, PAPERS, CHEMICALS. Price List 56S. Binghamton, NY: Agfa Ansco Corporation, Revised to July, 1937. -

The Soft-Focus Lens and Anglo-American Pictorialism
THE SOFT-FOCUS LENS AND ANGLO-AMERICAN PICTORIALISM William Russell Young, III A Thesis Submitted for the Degree of PhD at the University of St. Andrews 2008 Full metadata for this item is available in the St Andrews Digital Research Repository at: https://research-repository.st-andrews.ac.uk/ Please use this identifier to cite or link to this item: http://hdl.handle.net/10023/505 This item is protected by original copyright This item is licensed under a Creative Commons License The Soft-Focus Lens and Anglo-American Pictorialism William Russell Young, III B.S.B.A., M.B.A., M.A. Submitted in fulfillment of the requirements for Doctor of Philosophy April 30, 2007 Declarations (i) I, William Russell Young, III, hereby certify that this thesis, which is approximately 90,000 words in length, has been written by me, that it is the record of work carried out by me and that it has been written by me and that it has not been submitted in any previous application for a higher degree. April 30, 2007 ______________________________ William Russell Young, III (ii) I was admitted as a research student in January, 2001, and as a candidate for the degree of Doctor of Philosophy in Art History; the higher study for which this is a record was carried out in the University of St. Andrews between 2001 and 2007. April 30, 2007 _______________________________ William Russell Young, III (iii) I hereby certify that the candidate has fulfilled the conditions of the Resolution and Regulations appropriate for the degree of Doctor of Philosophy in the University of St. -

An Aplanatic Anastigmatic Lens System Suitable For
DET KGL. DANSKE VIDENSKABERNES SELSKAB MATEMATISK-FYSISKE MEDDELELSER, BIND XXIII, NR . 9 DEDICATED TO PROFESSOR' NIELS BOHR ON THE OCCASION OF HIS 60TH BIRTHDA Y AN APLANATIC ANASTIGMATIC LEN S SYSTEM SUITABLE FOR ASTROGRAPH OBJECTIVES BY BENGI' STROMGRE N KØBENHAV N I KOMMISSION HOS EJNAR MUNKSGAAR 1 1945 Printed in Denmark . Bianco Lunos Bogtrykkeri A/S 1 . As is well known the ordinary Fraunhofer lens is cha- racterized by a considerable astigmatism and curvature of field . In consequence the usable angular field is rather limited wit h this type of objective lens . In the Petzval lens system, consisting of four separate lenses , the astigmatism and curvature of field are much smaller tha n for the Fraunhofer lens. For the Cooke triplet lens these aber - rations are still further reduced . K . SCHWARZSCHILD (1) in a systematic analysis of lens system s gives the following numerical data . For the Fraunhofer lens the aberration disc is an ellipse the major axis of which is 104" OG2, while the minor axis is 47" OG2. Here 0 means th e aperture ratio expressed with the aperture ratio 1 :10 as unit , while G is the angular diameter of the field, with 6° as unit . For the Petzval lens the aberration' disc is approximately a circle with diameter 12 " O2G, while for the Cooke triplet len s it .is approximately a circle with diameter 3 " O22G . The objective of the standard Carte du Ciel astrograph is a Fraunhofer lens of 34 cm . aperture and 3.4 m . focal length, cor - responding to 0 = 1 . The standard field employed is 2° X 2°, i. -

Cooke Triplet Optimization Neelesh Ramachandran, Shijie Gu, Qingze Guan
Cooke Triplet Optimization Neelesh Ramachandran, Shijie Gu, Qingze Guan Cooke Triplet Intro A Cooke Triplet is made of 3 lenses (two positive lenses, and one negative lens). The design was initially conceptualized in the late 1800s as an alternative to other lens systems present at the time. This system uses only 3 lenses, in comparison to the 6, 8, or more of those other systems. The lens parameters are known to be optimizable to reduce not only chromatic aberrations (properties of doublets) but also monochromatic aberrations (such as spherical aberration and field curvature), exploiting symmetry. Project Scope Our goal was to build and optimize a Cooke triplet in Zemax Optical Studio, performing analyses of the spot diagrams and ray fan plots to make design choices and considering tolerances of the various parameters to understand how those impacted our results. We wanted to find a way to begin at a very coarse starting point (knowing simply that we would use 3 lenses, at some distances apart on the optical axis) and do literature research and simulations to enhance our results. Finding an Optimal Triplet A Cooke Triplet has 6 surfaces, 3 airspaces, and 2 lens materials (suppose two positive lenses have the same material)--altogether 11 variables for us to use to correct for 7 Seidel aberrations (spherical aberration, aberration, coma, astigmatism, astigmatism, field curvature, distortion), as well as chromatic aberrations with lens materials being a combination of flint and crown. To find the optimal lens, we solve the optimization problem of minimizing spot size with the aforementioned 11 variables. However, lens material is a discrete variable, which does not fit into the generic optimization algorithms as other continuous variables.