Development of Wireless Charging Component in Vehicle Design and Positioning Master’S Thesis in Product Development
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PIC6049F Wireless Charging Module Diagnosis Models
Bulletin No.: PIC6049F Published date: 02/13/2017 Preliminary Information PIC6049F Wireless Charging Module Diagnosis Models VIN: Brand: Model: Model Years: Engine: Transmissions: from to Buick LaCrosse 2017 All All All All Cadillac ATS 2015 - 2017 All All All All Cadillac CTS VIN A 2015 - 2017 All All All All Cadillac Escalade Models 2015 - 2017 All All All All Cadillac CT6 2016 - 2017 All All All All Cadillac ELR 2016 - 2017 All All All All Cadillac XTS 2016 - 2017 All All All All Cadillac XT5 2017 All All All All Chevrolet Suburban 2015 - 2017 All All All All Chevrolet Camaro 2016 - 2017 All All All All Chevrolet Cruze 2016 - 2017 All All All All Chevrolet Impala 2016 - 2017 All All All All Chevrolet Malibu 2016 - 2017 All All All All Chevrolet Volt 2016 - 2017 All All All All Chevrolet Silverado HD 2016 - 2017 All All All All Chevrolet Colorado 2017 All All All All GMC Yukon Models 2016 - 2017 All All All All GMC Sierra HD 2016 - 2017 All All All All GMC Acadia 2017 All All All All GMC Canyon 2017 All All All All Chevrolet Equinox 2018 All All All With Inductive Portable Wireless Device Charger (RPO K4C) Supersession Statement: This PI was superseded to end a part restriction and update EL 51755 ‘Inductive Charging Test Tool’ with new sleeve diagnostics and add the 2018 Chevrolet Equinox. Please discard PIC6049E The following diagnosis might be helpful if the vehicle exhibits the symptom(s) described in this PI. Condition / Concern The following procedure REQUIRES the use of EL 51755 ‘Inductive Charging Test Tool’ which is an essential tool shipped to every GM store earlier this year. -

Witricity:Wireless Power Transfer by Non-Radiative Method Ajey Kumar
International Journal of Engineering Trends and Technology (IJETT) – Volume 11 Number 6 - May 2014 WiTricity:Wireless Power Transfer By Non-radiative Method Ajey Kumar. R1, Gayathri. H. R2, Bette Gowda. R3, Yashwanth. B4 1Dept. of ECE, Malnad College of Engineering, Hassan, India 2Centre for Emerging Technologies, Jain University, Bangalore, India 3Dept. of EEE, Basaveshwara College of Engineering, Bagalkot, India 4Dept. of ECE, BVB College of Engineering & Technology, Hubli, India Abstract— A non-radiative energy transfer, commonly referred Thanks to the advent in power electronics, inductive charging, as WiTricity and based on ‘strong coupling’ between two coils also known as wireless charging, has found much successes which are separated physically by medium-range distances, is and is now receiving increasing attention by virtue of its proposed to realize efficient wireless energy transfer. WiTricity simplicity and efficiency. The most important distinctive idea is spear-headed by MIT researcher Marin Soljacic, which structural difference between contactless transformers and describes the ability to provide electricity to remote objects without wires. The advent of WiTricity technology is though old conventional transformers is that the two ‘coils’ in the former of 1899, explored by Nikola Tesla, but has founded its grip in are separated by a large air gap. Compared with plug and recent years with numerous gadgets and there snaking cables socket (i.e., conductive) charging, the primary advantage of around us. The technology is in turn expels E-waste and will free the inductive charging approach is that the system can work us from the power cords. WiTricity depends upon strong coupled with no exposed conductors, no interlocks and no connectors, resonance between transmitter and receiver coils. -
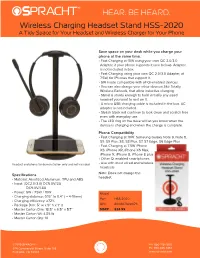
Wireless Charging Headset Stand HSS-2020 a Tidy Space for Your Headset and Wireless Charger for Your Phone
HEAR. BE HEARD. Wireless Charging Headset Stand HSS-2020 A Tidy Space for Your Headset and Wireless Charger for Your Phone Save space on your desk while you charge your phone at the same time. • Fast Charging at 10W using your own QC 2.0/3.0 Adapter, if your phone supports it (see below). Adapter is not included in box. • Fast Charging using your own QC 2.0/3.0 Adapter, at 7.5W, for iPhones that support it. • 5W mode compatible with all Qi-enabled devices. • You can also charge your other devices, like Totally Wireless Earbuds, that allow inductive charging. • Stand is sturdy enough to hold virtually any sized headset you want to rest on it. • A micro USB charging cable is included in the box. AC adapter is not included. • Stylish black will continue to look clean and scratch free even with everyday use. • The LED ring on the base will let you know when the device is charging and when the charge is complete. Phone Compatibility • Fast Charging at 10W: Samsung Galaxy Note 9, Note 8, S9, S9 Plus, S8, S8 Plus, S7, S7 Edge, S6 Edge Plus • Fast Charging at 7.5W iPhone XS, iPhone XR, iPhone XS Max, iPhone X, iPhone 8, iPhone 8 plus • Other Qi enabled smartphones Headset and phone for demonstration only and not included • Use with most wired and wireless headsets. Note: Does not charge the Specifications headset. • Material: Anodized Aluminum, TPU and ABS • Input: (QC2.0/3.0) DC5.0V/2A DC9.0V/1.8A • Power: 5W / 7.5W / 10W Model • Charging distance: 0.15” to 0.4” ( ≈ 4-10mm) Part HSS-2020 • Charging efficiency: ≥72% • Package Dim: 5” w x 9” h x 1” d UPC 800807320079 • Master Carton Dim: 18.5” x 6.5” x 5.7” MSRP $24.99 • Master Carton Wt: 4.85 lb • Master Carton Qty: 10 ©2019 SPRACHT® Ph: 650.215.7500 974 Commercial Street, Suite 108 Fx: 650.485.2453 Palo Alto, CA 94303 www.spracht.com HEAR. -
Wireless Charging
The convenience of wireless charging: It’s just physics White paper By Mark Estabrook, MediaTek www.mediatek.com Contents New hope emerges amidst standards war ................................................................................................... 2 Operator strategies for power management in LTE phones ........................................................................ 3 Why inductive charging may underwhelm consumers ................................................................................ 4 How tightly coupled technology is much like that of wired chargers .......................................................... 5 How tightly coupled technology constrains design ...................................................................................... 6 Summary on characteristics of tightly coupled inductive solutions ............................................................. 6 The convenience of loosely coupled highly resonant systems ..................................................................... 8 The theory behind highly resonant systems ................................................................................................. 9 Summary on characteristics of loosely coupled highly resonant solutions .................................................. 9 The efficiency of loosely coupled resonant systems .................................................................................. 10 Cost comparison of loosely coupled resonant and tightly coupled systems ............................................. -
Highly Resonant Wireless Power Transfer: Safe, Efficient, and Over Distance
Highly Resonant Wireless Power Transfer: WiTricity Safe, Efficient, and over Distance Dr. Morris Kesler WiTricity Corporation ©WiTricity Corporation, 2013 WiTricity Highly Resonant Wireless Power Transfer: Safe, Efficient, and over Distance Introduction Driving home from the airport, Marin noticed his new smart phone was low on battery once again. Its HD display, and apps using GPS, Bluetooth, and LTE/4G data communications conspired to drain the battery quickly. Without looking, he dropped his phone into an open cup-holder in the center console. Hidden several centimeters below the console, a wireless power source sensed the presence of the phone, and queried the device to determine whether or not it was wireless power enabled. The phone gave a valid response and configured itself for resonant wireless power transfer. Under the console, the source electronics turned on and began charging the phone wirelessly—with no need for a charging cradle, power cord, or especially accurate placement of the phone. Marin relaxed when he heard the recharging chime and focused his attention on the road ahead. After exiting the highway, Marin was surprised to see that the price of gasoline had climbed to over $4.00 per gallon, as it had been months since he had last filled his tank of his new car-- a wirelessly charged hybrid electric vehicle. Since installing a wireless 3.3 kW charger in his home and office garage, his car’s traction battery was fully charged every morning before work and every evening as he began his commute home. As Marin’s car silently pulled into his driveway, it communicated with the wireless charger in his garage. -

Genium X3 3B5-2/3B5-2=ST
Genium X3 3B5-2/3B5-2=ST Instructions for use (qualified personnel) ................................................................. 5 DE | INFORMATION Zusätzlich zu der gedruckten Gebrauchsanweisung, sind auch weitere Sprachen auf CD beigelegt (siehe rückseitigen Um schlag). Auf Anfrage können Sie eine gedruckte Gebrauchsanweisung kostenlos in der jeweiligen Landessprache unter der un ten angegebenen Anschrift bestellen. EN | INFORMATION In addition to the printed Instructions for Use, additional language versions are also included on CD (see back cover). You can order a printed version of the Instructions for Use at no charge in the respective national language at the address below. FR | INFORMATION Le mode d‘emploi est disponible en d‘autres langues sur CD en supplément de la version imprimée (voir au dos de la couver ture). Vous pouvez commander gratuitement une version imprimée du mode d‘emploi dans la langue de votre choix en envoyant votre demande à l‘adresse indiquée ci-dessous. ES | INFORMAĆION Aparte de las instrucciones de uso impresas, se incluye un CD con dichas instrucciones en otros idiomas (véase la solapa del dorso). Puede solicitar de forma gratuita unas instrucciones de uso impresas en el idioma de su país a la dirección que se indi ca más abajo. IT | INFORMAZIONE In aggiunta alle istruzioni per l‘uso in formato cartaceo, il CD contiene le istruzioni anche in altre lingue (vedere il retro della co pertina). Su richiesta, potete ordinare gratuitamente le istruzioni per l‘uso in formato cartaceo nella relativa lingua del vostro Paese all‘indirizzo di seguito riportato. PT | INFORMAÇÃO Adicionalmente ao manual de utilização impresso encontra-se incluído um CD com mais idiomas (consultar a contracapa). -

Wireless Charging
About This Product With this stylish accessory, available in black sapphire or white, you can charge your compatible Galaxy smartphones and other Qi-compatible devices without the need to plug your device in to a wall charger or USB port. Simply place your device directly onto the charging pad and your phone begins to charge. Wide compatibility The Samsung Wireless Charging Pad is Qi certified by the Wireless Power Consortium (WPC) and is compatible with all Qi-enabled devices including from Samsung: Galaxy S4, Galaxy S5, Galaxy Note4, Galaxy Note Edge and Galaxy Note3 (these Galaxy smartphones require Wireless Charging Battery Covers, sold separately) as well as the Galaxy S6, Galaxy S6 active, Galaxy S6 edge, Galaxy S6 edge+ and Galaxy Note5 which do not require additional charging battery covers. Wireless charging pad Power your compatible Samsung device without cables or cords using this Samsung wireless charging pad, which replenishes battery power in as little as 4 hours. Overload protection provides defense against damage. The small footprint takes up minimal desktop space and is easy to transport. No Cables. No Problem. Say goodbye to tangled wires and lost charging cables. The Samsung Wireless Charging Pad utilizes Qi Inductive Charging Technology that eliminates the need to attach a charging cable every time you want to charge your device. The dedicated Charging Pad is always at the ready, providing wireless power whenever you set your device on the pad. You can still use your device while charging, and your device is always accessible so you can answer a call without having to unplug. -

FY 2017 VTO Electrification Annual Progress Report
Electrification 2017 Annual Progress Report Vehicle Technologies Office (This page intentionally left blank) FY 2017 Annual Progress Report Disclaimer This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or any agency thereof. Disclaimer i Acronyms and Abbreviations A AC Alternating Current ACC Adaptive Cruise Control accel Acceleration ACS Advanced Combustion Systems ACSforEVER Advanced Climate Systems for EV Extended Range AER All-electric range AFV Alternative Fuel Vehicle AMI Advanced Metering Infrastructure AMT Automated Mechanical Transmission ANL Argonne National Laboratory ANN Artificial Neural Network AOI Areas of Interest APEC Asia Pacific Economic Council APRF Advanced Powertrain Research Facility APT Pressure Sensor ASD Aftermarket Safety Device -

Magnetically Coupled Resonance WPT: Review of Compensation Topologies, Resonator Structures with Misalignment, and EMI Diagnostics
Review Magnetically Coupled Resonance WPT: Review of Compensation Topologies, Resonator Structures with Misalignment, and EMI Diagnostics Mohamad Abou Houran, Xu Yang and Wenjie Chen * School of Electrical Engineering, Xi’an Jiaotong University, Xi’an 710049, China; [email protected] (M.A.H.); [email protected] (X.Y.) * Correspondence: [email protected]; Tel.: +86-29-82665223 Received: 11 September 2018; Accepted: 22 October 2018; Published: 2 November 2018 Abstract: Magnetically coupled resonance wireless power transfer systems (MCR WPT) have been developed in recent years. There are several key benefits of such systems, including dispensing with power cords, being able to charge multiple devices simultaneously, and having a wide power range. Hence, WPT systems have been used to supply the power for many applications, such as electric vehicles (EVs), implantable medical devices (IMDs), consumer electronics, etc. The literature has reported numerous topologies, many structures with misalignment effects, and various standards related to WPT systems; they are usually confusing and difficult to follow. To provide a clearer picture, this paper aims to provide comprehensive classifications for the recent contributions to the current state of MCR WPT. This paper sets a benchmark in order to provide a deep comparison between different WPT systems according to different criteria: (1) compensation topologies; (2) resonator structures with misalignment effects; and, (3) electromagnetic field (EMF) diagnostics and electromagnetic field interference (EMI), including the WPT-related standards and EMI and EMF reduction methods. Finally, WPT systems are arranged according to the application type. In addition, a WPT case study is proposed, an algorithm design is given, and experiments are conducted to validate the results obtained by simulations. -
Case 1:20-Cv-01671-UNA Document 1 Filed 12/09/20 Page 1 of 23 Pageid #: 1
Case 1:20-cv-01671-UNA Document 1 Filed 12/09/20 Page 1 of 23 PageID #: 1 IN THE UNITED STATES DISTRICT COURT FOR THE DISTRICT OF DELAWARE WITRICITY CORPORATION, ) MASSACHUSETTS INSTITUTE OF ) TECHNOLOGY, and AUCKLAND ) C.A. No. ____________ UNISERVICES LIMITED, ) ) JURY TRIAL DEMANDED Plaintiffs, ) ) v. ) ) MOMENTUM DYNAMICS CORPORATION, ) ) Defendant. ) COMPLAINT Plaintiffs WiTricity Corporation (“WiTricity”), Massachusetts Institute of Technology (“MIT”) and Auckland UniServices Limited (“Auckland”) (collectively, “Plaintiffs”) for their Complaint against Defendant Momentum Dynamics Corporation (“Momentum Dynamics”), hereby allege as follows: PARTIES 1. Plaintiff WiTricity is a Delaware corporation having a principal place of business at 57 Water Street, Watertown, MA 02472. 2. Plaintiff MIT is a non-profit private research and educational institution duly incorporated and existing under the laws of the Commonwealth of Massachusetts with a principal place of business at 77 Massachusetts Avenue, Cambridge, MA 02139. 3. Plaintiff Auckland is a New Zealand limited liability company with a principal place of business at Level 10, 49 Symonds Street, Auckland, 1010, New Zealand. 4. Upon information and belief, Defendant Momentum Dynamics is a Delaware corporation having a principal place of business at 3 Pennsylvania Avenue, Malvern, PA 19355. Case 1:20-cv-01671-UNA Document 1 Filed 12/09/20 Page 2 of 23 PageID #: 2 Upon information and belief, Defendant Momentum Dynamics develops wireless charging systems for the automotive and transportation industries in the United States. 5. Upon information and belief, Defendant Momentum Dynamics maintains a website at www.momentumdynamics.com that commercializes the accused technology by offering the technology for sale and development throughout the United States, including this District. -

Featuring a Wireless Charging Pad with Qi Inductive Charging Technology
ADESSOHOME.COM FEATURING A WIRELESS CHARGING PAD WITH QI INDUCTIVE CHARGING TECHNOLOGY. AdessoCharge lamps include a wireless charging pad with Qi inductive charging technology. Many smartphones (list below) have Qi technology built in, so just place your phone on the pad and it will charge right up. All AdessoCharge product is Qi certified by the Wireless Power Consortium. Please visit www.wirelesspowerconsortium.com/products/ search/ to see a list of Qi certified products. Our product has been tested and verified to be safe and in compliance with the Qi standard. The AdessoCharge pad supports 5W charging on contact with the charging pad. A USB is located on the base and can charge up a second device simultaneously. FORM AND FUNCTIONALITY. The charging pad will work when the lamp is plugged in, with the light on or off. This wireless charging pad will charge your phone through most materials, you do not even need to remove your case! Only metal and magnetic materials will hinder the function of the charging pad to charge through the case. QI CERTIFIED. If your smartphone doesn’t support Qi wireless charging, you can purchase a Qi compatible case, which is sold through a variety of retail channels. Please be sure to only use a Qi Certified case. Products using the Qi standard must be tested rigorously to help ensure safety, interoperability and energy efficiency. Only products that have passed these independent laboratory tests can use the Qi logo and are considered “Qi Certified.” All Qi Certified products are listed on the WPC website mentioned above. -

Charging Pad
Charging Pad Download Instructions Product Detail: SIMPLE AND IC2B Designation: 2 Position Qi Inductive Charging Pad with CONVENIENT Next generation charging technology for one additional USB charging port smartphones is now available – enabling you • Drop and Charge to charge without cords and cables. If your Model: IC2B • Non-Critical smartphone is Qi enabled, simply place your Alignment phone on the Energizer Inductive Charger. If Color: Black your smartphone is not Qi enabled, attach a • Charge up to 3 Qi sleeve or adapter, then charge. This dual Inductive Technology Certified Qi low power standard by the Devices zone charging pad allows for inductive Wireless Power Consortium charging of two devices simultaneously, and it www.wirelesspowerconsortium.com has an additional USB charging port for Qi INDUCTIVE charging of a third device. And our technology Inductive Compatibility: Works with all other Qi low power TECHNOLOGY allows for easy placement of devices. There inductive recievers (see the list on the are no magnets or need for precise alignment. WPC’s website coming soon) Watch for Qi technology to be included in The Standard for • your next smart phone. Inductive Charging USB Output: 5.0 V ± 5%, 500mA (D+/D- Shorted) • Coming to Other Devices Charging Pad Input: DC 9V, 2.3A • Supported by a AC Adapter Input: 100-240VAC 50/60Hz Consortium of >70 Companies AC Adapter Output: 9VDC, 2.3A Typical Weight: Charging Pad: 345 grams WORKS WITH... Dimensions (mm): 24(H) x 185(L) x 202(W) • iPhone 3G/3Gs and 4G Inductive Operating Temperature: 0-35°C Charging Sleeves • Blackberry Curve 8900 inductive Charging Door Before Using Your Charger: • More Qi Adapters and Please read all instructions and cautionary Important Notice Devices Coming Soon markings on the package and charger This datasheet contains information specific to products manufactured at the time of its publication Contents herein do not constitute a warranty ©Energizer / All Rights Reserved Form No.