Multispectral and Multiangle Cubesat Mission Targeting Sub-Kilometer Remote Sensing Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Issues Paper on Exploring Space Technologies for Sustainable Development and the Benefits of International Research Collaboration in This Context
United Nations Commission on Science and Technology for Development Inter-sessional Panel 2019-2020 7-8 November 2019 Geneva, Switzerland Issues Paper on Exploring space technologies for sustainable development and the benefits of international research collaboration in this context Draft Not to be cited Prepared by UNCTAD Secretariat1 18 October 2019 1 Contributions from the Governments of Austria, Belgium, Botswana, Brazil, Canada, Japan, Mexico, South Africa, Turkey, the United Kingdom, United States of America, as well as from the Economic and Social Commission for Asia and the Pacific, the Food and Agriculture Organization, the International Telecommunication Union, the United Nations Office for Disaster Risk Reduction and the World Food Programme are gratefully acknowledged. Contents Table of figures ....................................................................................................................................... 3 Table of boxes ......................................................................................................................................... 3 I. Introduction .................................................................................................................................... 4 II. Space technologies for the Sustainable Development Goals ......................................................... 5 1. Food security and agriculture ..................................................................................................... 5 2. Health applications .................................................................................................................... -

SPACE RESEARCH in POLAND Report to COMMITTEE
SPACE RESEARCH IN POLAND Report to COMMITTEE ON SPACE RESEARCH (COSPAR) 2020 Space Research Centre Polish Academy of Sciences and The Committee on Space and Satellite Research PAS Report to COMMITTEE ON SPACE RESEARCH (COSPAR) ISBN 978-83-89439-04-8 First edition © Copyright by Space Research Centre Polish Academy of Sciences and The Committee on Space and Satellite Research PAS Warsaw, 2020 Editor: Iwona Stanisławska, Aneta Popowska Report to COSPAR 2020 1 SATELLITE GEODESY Space Research in Poland 3 1. SATELLITE GEODESY Compiled by Mariusz Figurski, Grzegorz Nykiel, Paweł Wielgosz, and Anna Krypiak-Gregorczyk Introduction This part of the Polish National Report concerns research on Satellite Geodesy performed in Poland from 2018 to 2020. The activity of the Polish institutions in the field of satellite geodesy and navigation are focused on the several main fields: • global and regional GPS and SLR measurements in the frame of International GNSS Service (IGS), International Laser Ranging Service (ILRS), International Earth Rotation and Reference Systems Service (IERS), European Reference Frame Permanent Network (EPN), • Polish geodetic permanent network – ASG-EUPOS, • modeling of ionosphere and troposphere, • practical utilization of satellite methods in local geodetic applications, • geodynamic study, • metrological control of Global Navigation Satellite System (GNSS) equipment, • use of gravimetric satellite missions, • application of GNSS in overland, maritime and air navigation, • multi-GNSS application in geodetic studies. Report -

INPE) MCTI Çp ' Acordo Operação Técnica COPERNICUS Entre ESA,AEB E INPE (0026237) SEI 01350.001611/2018-03 / Pg
ORIGINAL N° 1 Copernicus Space Component Technical Operating Arrangement ESA - Brazilian Space Agency and INPE (INPE) MCTI çp ' Acordo Operação Técnica COPERNICUS entre ESA,AEB E INPE (0026237) SEI 01350.001611/2018-03 / pg. 1 Table of Contents 1 INTRODUCTION....................................................................................... 4 1.1 Background....................................................................................................................... 4 1.2 Purpose and objectives ..................................................................................................... 4 1.3 Scope................................................................................................................................. 6 1.4 References......................................................................................................................... 6 2 EUROPEAN ACCESS TO BRAZILIAN EO MISSIONS AND CALIBRATION DATA AND PARTNER IN-SITU DATA ............................................................. 7 3 ARRANGEMENT OF TECHNICAL INTERFACES ....................................... 8 3.1 Technical Arrangement Types.......................................................................................... 8 4 INTERNATIONALARCHIVING AND DISSEMINATION CENTRES, MIRRORSITE ................................................................................................ 9 4.1 Invohred Entities............................................................................................................... 9 4.2 INPE Activity -

Results Brochure
Initiated by: #FarmingbySatellite Sponsored by: www.farmingbysatellite.eu Results Brochure Initiated by: Sponsored by: Table of Contents Introduction 03 The participant journey 04 Using European satellite technologies to improve agriculture Meet the start-ups 06 and reduce environmental impact European Prizes The 2020 edition of the Farming by Satellite Prize has GNSS is a key enabler of precision agriculture, allowing officially come to an end. This year, we celebrate the farmers to operate machinery along parallel lines, avoid Graniot – Winner 07 fifth edition and looking back at the numerous ideas overlaps and gaps in field cultivation, and reduce their submitted, we see a thriving entrepreneurial ecosystem fatigue thanks to satellite-enabled autopilot. GNSS also Genuine – 2nd place 08 building around satellite technology enabled solutions helps to reduce agriculture’s ecological footprint. In for sustainable agriculture in both Europe and Africa. particular, the satellite programmes play a crucial role rd Ai4ocean farming – 3 place 09 in the Common Agricultural Policy, delivering significant Innovation is crucial for the growth and sustainability added value for farmers, the institutions involved and Harvesting Prizes – grand finalist 10 of the agricultural sector and enables the response society at large. Leveraging this innovation potential for RVRI – grand finalist 11 to emerging global challenges such as the rise of the society and encouraging this type of strong innovative global population and the impact of climate change. thinking from the next generation are key motivators for The Farming by Satellite Prize is designed to encourage setting up this competition. Special Africa Prize young professionals, farmers, and students in Europe to create new, sustainable, and environmentally friendly The competition is a joint initiative by the European GeoM&E – Winner Special 12 solutions using Copernicus, EGNOS and Galileo. -

Securing the Copernicus Programme Why EU Earth Observation Matters
Briefing April 2017 Securing the Copernicus programme Why EU earth observation matters SUMMARY The Copernicus programme is a user-driven programme which provides six free-of- charge operational services (atmosphere monitoring, marine environment monitoring, land monitoring, climate change, emergency management and security) to EU, national, and regional institutions, as well as to the private sector. The programme builds on the initiative on global monitoring for environment and security launched in 2001. It aims at filling the gaps in European earth observation capacities. Data is provided from space infrastructures, particularly the sentinel missions developed under the programme, and in situ infrastructure supported by the Member States. Copernicus services are mainly operated by European Union (EU) agencies. Copernicus requires a high level of continuity in data and service provision. A strong political commitment at EU level is required to provide adequate funding for the development of the operational earth observation missions and services. The EU – under the framework programme for research and operational programmes – and the European Space Agency (ESA) have invested more than €7 billion in Copernicus since 2002. By the end of 2017, four of the six sentinel missions should be fully deployed and the last of the six services should become fully operational. As Copernicus reaches its full operational stage, the focus of the programme is shifting towards the uptake of the services and the development of a downstream sector that would provide additional commercial services to the users. This aspect is a key priority of the space strategy adopted by the European Commission in October 2016. The development of the downstream sector is dependent on the long-term continuity of service, to be ensured by improved governance of the programme and renewed long- term political and financial commitments for the next EU budgetary period. -
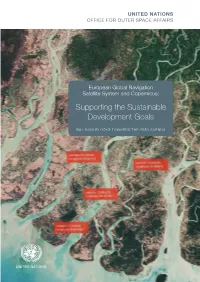
Supporting the Sustainable Development Goals
UNITED NATIONS OFFICE FOR OUTER SPACE AFFAIRS European Global Navigation Satellite System and Copernicus: Supporting the Sustainable Development Goals BUILDING BLOCKS TOWARDS THE 2030 AGENDA UNITED NATIONS Cover photo: ©ESA/ATG medialab. Adapted by the European GNSS Agency, contains modified Copernicus Sentinel data (2017), processed by ESA, CC BY-SA 3.0 IGO OFFICE FOR OUTER SPACE AFFAIRS UNITED NATIONS OFFICE AT VIENNA European Global Navigation Satellite System and Copernicus: Supporting the Sustainable Development Goals BUILDING BLOCKS TOWARDS THE 2030 AGENDA UNITED NATIONS Vienna, 2018 ST/SPACE/71 © United Nations, January 2018. All rights reserved. The designations employed and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations concern- ing the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. Information on uniform resource locators and links to Internet sites contained in the present pub- lication are provided for the convenience of the reader and are correct at the time of issue. The United Nations takes no responsibility for the continued accuracy of that information or for the content of any external website. This publication has not been formally edited. Publishing production: English, Publishing and Library Section, United Nations Office at Vienna. Foreword by the Director of the Office for Outer Space Affairs The 2030 Agenda for Sustainable Development came into effect on 1 January 2016. The Agenda is anchored around 17 Sustainable Development Goals (SDGs), which set the targets to be fulfilled by all governments by 2030. -

Copernicus) Lead DG: DEFIS I
Programme Statements DB2021 HEADING 1A: Competitiveness for growth and jobs European Earth Observation Programme (Copernicus) Lead DG: DEFIS I. Overview What the programme is about? Copernicus is the European system for monitoring the Earth. It is a user-driven programme offering six free-of charge services to EU, national, and regional institutions, as well as to the private sector: atmosphere monitoring, marine environment monitoring, land monitoring, climate change, emergency management and security. The programme builds on the initiative on global monitoring for environment and security launched in 1998. It aims at filling the gaps in European earth observation capacities. Data is provided from space infrastructures, particularly the sentinel missions developed under the programme, other missions and in- situ infrastructure supported by the Member States. Copernicus services are mainly operated by European Union bodies and agencies. The Copernicus Services transform this wealth of satellite and in situ data into value-added information by processing and analysing the data. Datasets stretching back for years and decades are made comparable and searchable, thus ensuring the monitoring of changes and their impact; patterns are examined and used to create better forecasts, for example, of the ocean and the atmosphere. Maps are created from imagery, features and anomalies are identified and statistical information is extracted. EU added value of the programme Copernicus is a programme originally launched under the Europe 2020 strategy for smart, sustainable and inclusive growth, and is actually a component of the new Space Regulation, based on the European Space Strategy. Given its benefits to a wide range of EU policies and its potential for reaching the objectives of the European Green Deal, Copernicus is a prominent industrial as well as environmental policy programme. -
Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 6 April-June 2020 CONTENTS FOCUS ..................................................................................................................... 6 The Crew Dragon mission to the ISS and the Commercial Crew Program ..................................... 6 SPACE POLICY AND PROGRAMMES .................................................................................... 7 EUROPE ................................................................................................................. 7 COVID-19 and the European space sector ....................................................................... 7 Space technologies for European defence ...................................................................... 7 ESA Earth Observation Missions ................................................................................... 8 Thales Alenia Space among HLS competitors ................................................................... 8 Advancements for the European Service Module ............................................................... 9 Airbus for the Martian Sample Fetch Rover ..................................................................... 9 New appointments in ESA, GSA and Eurospace ................................................................ 10 Italy introduces Platino, regions launch Mirror Copernicus .................................................. 10 DLR new research observatory .................................................................................. -

THE EUROPEAN UNION and SPACE: OPPORTUNITIES and RISKS Jana Robinson and Michael Romancov
EU NON-PROLIFERATION CONSORTIUM The European network of independent non-proliferation think tanks NON-PROLIFERATION PAPERS No. 37 January 2014 THE EUROPEAN UNION AND SPACE: OPPORTUNITIES AND RISKS jana robinson and michael romancov I. INTRODUCTION SUMMARY Space has become an essential domain for Access to space is becoming increasingly important for strengthening the capacity of the European Union both public (including military and civilian) and private (EU) to advance domestic prosperity and gain users, including for the European Union (EU) and its international influence. Space policy and space- member states. The different purposes for which space is being exploited make it a dynamic and rapidly growing related cooperation have developed into an essential domain. As the number of terrestrial activities that depend component of foreign and security policy-related on the space environment increases, so too do the potential planning and decision-making. Europe has joined vulnerabilities to disruption. Regrettably, the system of a number of spacefaring states in the competition governance needed to reduce risks associated with an to derive greater civilian, societal, commercial and increasingly complex, congested and competitive space military benefits from its presence in space. environment is evolving more slowly. The EU now has a defined role in space-related The EU has made a significant investment of human, endeavours. As Article 189 of the Treaty on the technical and financial capital to develop the relevant Functioning of the European Union (as amended capacities to make use of the opportunities provided by by the 2007 Treaty of Lisbon) gave the EU, for space. This investment is likely to continue to grow. -

APSCC Monthly E-Newsletter
APSCC Monthly e‐Newsletter August 2020 The Asia‐Pacific Satellite Communications Council (APSCC) e‐Newsletter is produced on a monthly basis as part of APSCC’s information services for members and professionals in the satellite industry. Subscribe to the APSCC monthly newsletter and be updated with the latest satellite industry news as well as APSCC activities! To renew your subscription, please visit www.apscc.or.kr. To unsubscribe, send an email to [email protected] with a title “Unsubscribe.” News in this issue has been collected from July 1 to July 31. INSIDE APSCC APSCC 2020 Conference Series Starts from August 18: LIVE Every Tuesday 9AM HK l Singapore Time from August 18 to November 17 APSCC 2020 is the largest annual event of the Asia Pacific satellite community, which incorporates industry veterans, local players as well as new players into a single platform in order to reach out to a wide-ranging audience. Organized by the Asia Pacific Satellite Communications Council (APSCC), APSCC 2020 this year is even stretching further by going virtual and live. Every Tuesday mornings at 9 AM Hong Kong and Singapore time, new installments in APSCC 2020 will be presented live - in keynote speeches, panel discussions, and in presentations followed by Q&A format. Topics will range across a selection of issues the industry is currently grappling with globally, as well as in the Asia-Pacific region. Register now and get access to the complete APSCC 2020 Series with a single password. To register go to https://apsccsat.com. APSCC Summit@ConnecTechAsia (SatelliteAsia) September 29 ~ October 1, Online Event, https://www.connectechasia.com/satellite-asia/ The Asia-Pacific Satellite Communications Council (APSCC), in conjunction with Informa Markets, will present interactive online sessions at ConnecTechAsia 2020, Asia’s biggest telecom industry event. -

COVID-19 and the European Space Sector
Special Report COVID-19 and the European space sector Report: Title: “ESPI Special Report - COVID-19 and the European space sector” Published: July 2020 ISSN: 2218-0931 (print) • 2076-6688 (online) Editor and publisher: European Space Policy Institute (ESPI) Schwarzenbergplatz 6 • 1030 Vienna • Austria Phone: +43 1 718 11 18 -0 E-Mail: [email protected] Website: www.espi.or.at Rights reserved - No part of this report may be reproduced or transmitted in any form or for any purpose without permission from ESPI. Citations and extracts to be published by other means are subject to mentioning “ESPI Special Report - COVID-19 and the European space sector, July 2020. All rights reserved” and sample transmission to ESPI before publishing. ESPI is not responsible for any losses, injury or damage caused to any person or property (including under contract, by negligence, product liability or otherwise) whether they may be direct or indirect, special, incidental or consequential, resulting from the information contained in this publication. Design: copylot.at Cover page picture credit: @Tmaximumge, Creative Commons TABLE OF CONTENT FOREWORD ...................................................................................................................................... 1 SPACE SOLUTIONS IN RESPONSE TO THE CRISIS ...................................................................... 2 Space solutions for crisis monitoring ........................................................................................................ 3 Space solutions -
Copernicus Programme
COPERNICUS European Commission, DG GROW, Copernicus Unit Peter Breger & Bernard Pinty Brussels, 1st June 2016 Follow us on: Copernicus EU CopernicusEU www.copernicus.eu Space in Brief The Copernicus programme is a cornerstone of the European Union’s efforts to monitor the Earth and its many ecosystems, whilst ensuring that its citizens are prepared and protected in the face of crises and natural or man-made disasters. The Copernicus Programme is a tool for economic development and a driver for digital economy. The Copernicus programme places a world of insight about our planet at the disposal of citizens, public authorities and policy makers, scientists, entrepreneurs and businesses on a full, free and open basis. Space Copernicus Funding From research to operations: Dedicated satellites Copernicus GMES: R&D funded activities operational under FP7 programme Preparatory GIO: Initial Operational services actions Operations 2008 2011 2014 2020 € 1.3 Bn € 4.3 Bn Space Copernicus Space Component: Dedicated Missions S1: Radar Mission S2: High Resolution Optical Mission S3: Medium Resolution Imaging and Altimetry Mission S4: Geostationary Atmospheric Chemistry Mission S5P: Low Earth Orbit Atmospheric Chemistry Precursor Mission S5: Low Earth Orbit Atmospheric Chemistry Mission S6 (Jason-CS): Altimetry Mission Space Continuity until 2030 S1A Copernicus Constellation Deployment Schedule 2014 2015 2016 2017 2018 2019 2020 2021 2022 2023 2024 2025 2026 2027 FAR Sentinel 1A FAR Sentinel 1B (recurrent) FAR Sentinel 1C (recurrent) S2A PSR On-ground