Color Vision Consciousness System Capable of Additionally Learning New Knowledge
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
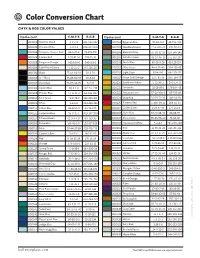
Color Conversion Chart
Color Conversion Chart CMYK & RGB COLOR VALUES Opalescent C-M-Y-K R-G-B Opalescent C-M-Y-K R-G-B 000009 Reactive Cloud 4-2-1-0 241-243-247 000164 Egyptian Blue 81-48-0-0 49-116-184 000013 Opaque White 4-2-2-1 246-247-249 000203 Woodland Brown 22-63-87-49 120-70-29 000016 Turquoise Opaque Rod 65-4-27-6 75-174-179 000206 Elephant Gray 35-30-32-18 150-145-142 000024 Tomato Red 1-99-81-16 198-15-36 000207 Celadon Green 43-14-46-13 141-167-137 000025 Tangerine Orange 1-63-100-0 240-119-2 000208 Dusty Blue 60-25-9-28 83-123-154 000034 Light Peach Cream 5-12-15-0 243-226-213 000212 Olive Green 44-4-91-40 104-133-42 000100 Black 75-66-60-91 10-9-10 000216 Light Cyan 62-4-9-0 88-190-221 000101 Stiff Black 75-66-60-91 10-9-10 000217 Green Gold Stringer 11-6-83-13 206-194-55 000102 Blue Black 76-69-64-85 6-7-13 000220 Sunflower Yellow 5-33-99-1 240-174-0 000104 Glacier Blue 38-3-5-0 162-211-235 000221 Citronelle 35-15-95-1 179-184-43 000108 Powder Blue 41-15-11-3 153-186-207 000222 Avocado Green 57-24-100-2 125-155-48 000112 Mint Green 43-2-49-2 155-201-152 000224 Deep Red 16-99-73-38 140-24-38 000113 White 5-2-5-0 244-245-241 000225 Pimento Red 1-100-99-11 208-10-13 000114 Cobalt Blue 86-61-0-0 43-96-170 000227 Golden Green 2-24-97-34 177-141-0 000116 Turquoise Blue 56-0-21-1 109-197-203 000236 Slate Gray 57-47-38-40 86-88-97 000117 Mineral Green 62-9-64-27 80-139-96 000241 Moss Green 66-45-98-40 73-84-36 000118 Periwinkle 66-46-1-0 102-127-188 000243 Translucent White 5-4-4-1 241-240-240 000119 Mink 37-44-37-28 132-113-113 000301 Pink 13-75-22-10 -

RAL COLOR CHART ***** This Chart Is to Be Used As a Guide Only. Colors May Appear Slightly Different ***** Green Beige Purple V
RAL COLOR CHART ***** This Chart is to be used as a guide only. Colors May Appear Slightly Different ***** RAL 1000 Green Beige RAL 4007 Purple Violet RAL 7008 Khaki Grey RAL 4008 RAL 7009 RAL 1001 Beige Signal Violet Green Grey Tarpaulin RAL 1002 Sand Yellow RAL 4009 Pastel Violet RAL 7010 Grey RAL 1003 Signal Yellow RAL 5000 Violet Blue RAL 7011 Iron Grey RAL 1004 Golden Yellow RAL 5001 Green Blue RAL 7012 Basalt Grey Ultramarine RAL 1005 Honey Yellow RAL 5002 RAL 7013 Brown Grey Blue RAL 1006 Maize Yellow RAL 5003 Saphire Blue RAL 7015 Slate Grey Anthracite RAL 1007 Chrome Yellow RAL 5004 Black Blue RAL 7016 Grey RAL 1011 Brown Beige RAL 5005 Signal Blue RAL 7021 Black Grey RAL 1012 Lemon Yellow RAL 5007 Brillant Blue RAL 7022 Umbra Grey Concrete RAL 1013 Oyster White RAL 5008 Grey Blue RAL 7023 Grey Graphite RAL 1014 Ivory RAL 5009 Azure Blue RAL 7024 Grey Granite RAL 1015 Light Ivory RAL 5010 Gentian Blue RAL 7026 Grey RAL 1016 Sulfer Yellow RAL 5011 Steel Blue RAL 7030 Stone Grey RAL 1017 Saffron Yellow RAL 5012 Light Blue RAL 7031 Blue Grey RAL 1018 Zinc Yellow RAL 5013 Cobolt Blue RAL 7032 Pebble Grey Cement RAL 1019 Grey Beige RAL 5014 Pigieon Blue RAL 7033 Grey RAL 1020 Olive Yellow RAL 5015 Sky Blue RAL 7034 Yellow Grey RAL 1021 Rape Yellow RAL 5017 Traffic Blue RAL 7035 Light Grey Platinum RAL 1023 Traffic Yellow RAL 5018 Turquiose Blue RAL 7036 Grey RAL 1024 Ochre Yellow RAL 5019 Capri Blue RAL 7037 Dusty Grey RAL 1027 Curry RAL 5020 Ocean Blue RAL 7038 Agate Grey RAL 1028 Melon Yellow RAL 5021 Water Blue RAL 7039 Quartz Grey -

SDS Is Correct to the Best of Our Knowledge, Information and Belief at the Date of Its Publication
SAFETY DATA SHEET Issuing Date 28-Oct-2016 Revision Date 28-Oct-2016 Revision Number 0 This document complies with the US OSHA Hazard Communication Standard (29 CFR 1910.1200), Canada WHMIS 2015 which includes the amended Hazardous Products Act (HPA) and the Hazardous Products Regulation (HPR), and Mexico’s NMX-R-019-SC-2011. 1. IDENTIFICATION OF THE SUBSTANCE/PREPARATION AND THE COMPANY/UNDERTAKING GHS product identifier Product Name Dykem Transparent Stain Bulk - Steel Blue, Steel Red and Black Other means of identification Part Number Dk Blue - Steel Blue (80200, 80300, 80400, 80600, 80700), Red - Steel Red (80296, 80396, 80496, 80696), Black (81731) Formula Code Dk Blue - Steel Blue (8706), Red - Steel Red (8705), Black (8749) UN-Number UN1263 Synonyms None Recommended use of the chemical and restrictions on use Recommended Use Staining Colors Uses advised against No information available Supplier's details Initial Supplier Supplier Address ITW Permatex Canada ITW PRO BRANDS 1-35 Brownridge Road 805 E. Old 56 Highway Halton Hills, ON, L7G 0C6 Olathe, KS 66061 Canada TEL: 1-800-443-9536 Emergency telephone number Emergency Telephone 800-535-5053 Infotrac Number 2. HAZARDS IDENTIFICATION Classification This product is considered hazardous according to the criteria set within the US OSHA Hazard Communication Standard (29 CFR 1910.1200), Canada WHMIS 2015 which includes the amended Hazardous Products Act (HPA) and the Hazardous Products Regulation (HPR), and Mexico’s NMX-R-019-SC-2011. Skin Corrosion/Irritation Category 2 _____________________________________________________________________________________________ -

Available Colors
SeeAvailable product order forms Colors for standard and optional colors Rebel Series Braces RelieverOne OA Powdercoat Colors Standard Powdercoat Colors Gloss Black Argento Gray Texture Black Bengal Silver Gloss Black Silver Candy Green Sky Blue Electric Blue Violet These images are a close representation of actual colors, but are not an exact duplication. The colors and fabrics shown are for illustration purposes only, and will vary slightly from the actual finish of the Bengal White Bengal Yellow Sparkle Red Copper brace. If you have questions, please call Townsend Design’s fabrication center, 800.432.3466. Premier Series Braces Premier Series Braces Paint Colors Textured Powdercoat Colors Gloss Black Quicksilver Pearl White Indy Yellow Texture Black Royal Blue Emerald Green Steel Blue Royal Blue Burnt Orange Burgundy Pewter Beige Dark Violet Burgundy Full Shell Series Braces Fabrics/Pigments Gloss Black Royal Blue Navy Blue Grey Sheer fabrics (red, teal and purple) are added over the graphite to create a snake skin like look (a clear graphite brace with a color tint). Patients can also provide 1 yard of material. We recommend small Red Green Beige Burgundy repeat pattern polyester or cotton materials. Any logo or emblem must be small enough to fit within the trim lines of the brace. Dipping a piece of the fabric in water shows how the material could appear after fabrication (the lamination process will Clear Sheer Red Sheer Teal Sheer Purple generally darken and dull colors). There is a charge for this inlay service if the patient provides their own fabric. Flag Fabric Townsend Design Custom Paint Finishes GD100 GD200 Townsend Design offers several custom paint finishes. -
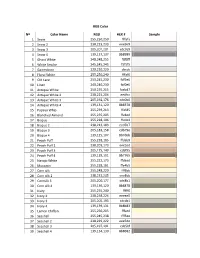
RGB Color Nº Color Name RGB HEX # Sample 1 Snow 255,250,250
RGB Color Nº Color Name RGB HEX # Sample 1 Snow 255,250,250 fffafa 2 Snow 2 238,233,233 eee9e9 3 Snow 3 205,201,201 cdc9c9 4 Snow 4 139,137,137 8b8989 5 Ghost White 248,248,255 f8f8ff 6 White Smoke 245,245,245 f5f5f5 7 Gainesboro 220,220,220 dccdc 8 Floral White 255,250,240 fffaf0 9 Old Lace 253,245,230 fdf5e6 10 Linen 240,240,230 faf0e6 11 Antique White 250,235,215 faebd7 12 Antique White 2 238,223,204 eedfcc 13 Antique White 3 205,192,176 cdc0b0 14 Antique White 4 139,131,120 8b8378 15 Papaya Whip 255,239,213 ffefd5 16 Blanched Almond 255,235,205 ffebcd 17 Bisque 255,228,196 ffe4c4 18 Bisque 2 238,213,183 eed5b7 19 Bisque 3 205,183,158 cdb79e 20 Bisque 4 139,125,107 8b7d6b 21 Peach Puff 255,218,185 ffdab9 22 Peach Puff 2 238,203,173 eecbad 23 Peach Puff 3 205,175,149 cdaf95 24 Peach Puff 4 139,119,101 8b7765 25 Navajo White 255,222,173 ffdead 26 Moccasin 255,228,181 ffe4b5 27 Corn silk 255,248,220 fff8dc 28 Corn silk 2 238,232,205 eee8dc 29 Cornsilk 3 205,200,177 cdc8b1 30 Corn silk 4 139,136,120 8b8878 31 Ivory 255,255,240 fffff0 32 Ivory 2 238,238,224 eeeee0 33 Ivory 3 205,205,193 cdcdc1 34 Ivory 4 139,139,131 8b8b83 35 Lemon Chiffon 255,250,205 fffacd 36 Seashell 255,245,238 fff5ee 37 Seashell 2 238,229,222 eee5de 38 Seashell 3 205,197,191 cdc5bf 39 Seashell 4 139,134,130 8b8682 40 Honeydew 240,255,240 f0fff0 41 Honeydew 2 244,238,224 e0eee0 42 Honeydew 3 193,205,193 c1cdc1 43 Honeydew 4 131,139,131 838b83 44 Mint Cream 245,255,250 f5fffa 45 Azure 240,255,255 f0ffff 46 Alice Blue 240,248,255 f0f8ff 47 Lavender 230,230,250 e6e6fa -

ORACAL® 951 Premium Cast - COLOR CHART
ORACAL 951 Premium® Cast *070 Black and 010 White available in Glossy and Matte ORACAL® 951 Premium Cast - COLOR CHART 000 010* 109 201 226 216 Transparent White Hull White Crocus Yellow Summer Yellow Traffic Yellow 209 219 020 204 208 019 Maize Yellow Yolk Yellow Golden Yellow Melon Yellow Post Office Yellow Signal Yellow 820 825 817 023 804 818 Golden Brown Sandstone Almond Cream Beige Brown Saffron 816 341 035 332 333 335 Papyrus Coral Pastel Orange Deep Orange Pure Orange Mars Red 326 030 031 032 324 359 Signal Red Dark Red Red Light Red Blood Red Tomato 028 305 334 348 355 026 Cardinal Red Geranium Red Fire Brigade Red Scarlet Red Blaze Red Purple Red 340 347 044 402 409 043 Chestnut Red Coral Magenta Cyclamen Pale Lilac Lavender 407 415 048 549 555 056 Deep Violet Summer Plum Bordeaux Dove Blue Glacier Blue Ice Blue 053 547 052 545 086 546 Light Blue Fjord Blue Azure Blue Ocean Blue Brilliant Blue L Velvet Blue 509 544 067 536 049 050 Sea Blue Indigo Blue Blue Middle Blue King Blue Dark Blue 511 065 537 564 570 518 Night Blue Cobalt Blue Deep Blue Light Navy Moonlight Blue Steel Blue 571 573 574 501 502 503 Mystic Blue Marlin Blue Coastal Blue Mint Blue Blue Turquoise Water Blue 553 628 630 601 602 062 Lagoon Sea Green Blue Green Lime Green Grass Green Light Green 619 603 604 612 078 625 Traffic Green Mint Green Cactus Green Police Green Foliage Green Moss Green 060 622 635 811 812 810 Dark Green Fir Tree Green Forest Green Sahara Beige Terracotta Cocoa Brown ORACAL 951 Premium® Cast *070 Black and 010 White available in Glossy and -

Gemini Gel ID Chart
Gemini Gel ID Chart Rev 1.0 - November, 2019 For use with: • Gemini 2x1 Soft Firmware Rev C1 and later • Gemini 1x1 Soft Firmware A3 and later* *NOTE: Gemini 1x1 Firmware A3 only uses Version 1 gels Contents Contents ........................................................................................................................................................ 1 Introduction .................................................................................................................................................. 2 Gel Sets ......................................................................................................................................................... 2 DMX Control.................................................................................................................................................. 2 Version 1 GEL ID Chart .................................................................................................................................. 3 Version 2 GEL ID Chart .................................................................................................................................. 8 1 litepanels.com Introduction This document references the library of gel simulations available on Gemini 1x1 and Gemini 2x1. There are over 300 industry-standard gels that have been recreated and can be recalled quickly from the onboard interface or via DMX. Each of these gel presets can be selected with a Tungsten or Daylight source, for a total of more than 600 built-in gel colors available. -

Ansi Z400 Msds Bulk Form
SAFETY DATA SHEET Issuing Date 09-Apr-2014 Revision Date 08-May-2015 Revision Number 1 1. IDENTIFICATION OF THE SUBSTANCE/PREPARATION AND THE COMPANY/UNDERTAKING GHS product identifier Product Name Dykem Transparent Stain Bulk - Steel Blue, Steel Red and Black Other means of identification Part Number Dk Blue - Steel Blue (80200, 80300, 80400, 80600, 80700), Red - Steel Red (80296, 80396, 80496, 80696), Black (81731) Formula Code Dk Blue - Steel Blue (8706), Red - Steel Red (8705), Black (8749) UN-Number UN1263 Synonyms None Recommended use of the chemical and restrictions on use Recommended Use Staining Colors Uses advised against No information available Supplier's details Supplier Address ITW Pro Brands 805 E. Old 56 Highway Olathe, KS 66061 TEL: 1-800-443-9536 Emergency telephone number Emergency Telephone 800-535-5053 Infotrac Number 2. HAZARDS IDENTIFICATION Classification This chemical is considered hazardous according to the OSHA Hazard Communication Standard 2012 (29 CFR 1910.1200) Skin Corrosion/Irritation Category 2 Serious Eye Damage/Eye Irritation Category 1 Reproductive Toxicity Category 2 Specific Target Organ Systemic Toxicity (Single Exposure) Category 3 _____________________________________________________________________________________________ Page 1 / 12 Revision Date 08-May-2015 WPS-ITW-025 - Dykem Transparent Stain Bulk - Steel Blue, Steel Red and Black _____________________________________________________________________________________________ Flammable liquids Category 2 GHS Label elements, including precautionary -
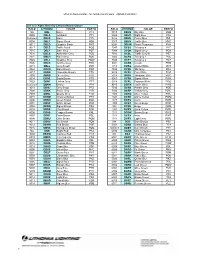
Color Chart List
Lithonia Nomenclature for Architectural Colors - Alphabetical Order List is in Alpha Order by Lithonia Nomenclature RAL # LITHONIA COLOR PART # RAL # LITHONIA COLOR PART # NA DBL Black P13 5015 DBUS Sky Blue PBQ 9005 DBLA Jet Black PTY 5022 DBUT Night Blue PD5 Textured DBLB Black P75 5024 DBUU Pastel Blue PML 9004 DBLC Signal Black PQR 5017 DBUV Traffic Blue PMC 9011 DBLD Graphite Black PNT 6034 DBUW Pastel Turquoise PVH 9017 DBLE Traffic Black PQS 7047 DCGJ Telegrey 4 PLZ 7015 DBLF Slate Grey PQT 7004 DCGK Signal Grey PGX 7016 DBLG Anthracite Grey PQU 7043 DCGL Traffic Grey B PE7 7021 DBLH Black Grey PQV 7045 DCPS Telegrey 1 PC6 7024 DBLJ Graphite Grey PQW 7046 DCPT Telegrey 2 PC7 7026 DBLK Granite Grey PQX 9001 DCRB Cream PRM 8019 DBLL Grey Brown PQY 1013 DCRG Oyster White PRT 8022 DBLM Black Brown PQZ 7044 DCRH Silk Grey PRU 8017 DBNB Chocolate Brown PTN 9010 DCRJ Pure White PGZ 7009 DBND Green Grey PTR 5018 DGRJ Turquoise Blue PGC 8014 DBNE Sepia Brown PTS 9003 DCRK Signal White PWK 7022 DBNF Umbra Grey PTT 9018 DCRL Papyrus White PGQ Textured DBNH Bronze P74 9016 DCRM Traffic White PWB 1019 DBNJ Grey Beige PFZ 7032 DCRN Pebble Grey PGE 7030 DBNK Stone Grey PLB 7034 DCRP Yellow Grey PWC 7039 DBNL Quartz Grey PTW 1020 DCRQ Olive Yellow PWL 8015 DBNM Chestnut Brown PTX 1024 DCRR Ochre Yellow PWM 8000 DBNN Green Brown PQC 1027 DCRS Curry PWN 8001 DBNP Ochre Brown PNX 1000 DCRT Green Beige PWP 8002 DBNQ Signal Brown PQJ 1001 DCRU Beige PWQ 8003 DBNR Clay Brown PQK 1002 DCRV Sand Yellow PWR 8004 DBNS Copper Brown PNL 1011 DCRW Brown Beige -

2007 OEM Truck Colors
2007 OEM Truck Colors * NOTE - Starred items are new colors for 2007 Dodge Ram Dodge Dakota PB7 Patriot Blue PC PBT Patriot Blue PC PB5 Electric Blue * PB5 Electric Blue * PDM Mineral Gray M PDM Mineral Gray M PJC Light Khaki PJC Light Khaki PR4 Flame Red PR4 Flame Red PRH Inferno Red PC PRJ Inferno Red PC PS2 Bright Silver M PSB Bright Silver M PW7 Bright White PW7 Bright White PXR Brilliant Black * PXR Brilliant Black * GM Silverado/Sierra GM Colorado/Canyon 16 Graystone M 20 Pace Blue * 25 Dark Blue M 37 Imperial Blue M * 41 Black 41 Black 46 Blue Granite M 43 Yellow 47 Dark Green M 46 Blue Granite M 50 Summit White 50 Summit White 59 Silver Birch M 59 Silver Birch M 63 Sport Red M 66 Deep Ruby M * 74 Victory Red 74 Victory Red 81 Desert Brown M * 85 Sunburst Orange M Ford F-150 2007 Super Duty 2008 Super Duty CX Dark Shadow Grey M AQ Arizona Beige M CX Dark Shadow Grey M DX Dark Blue Pearl M * CX Dark Shadow Grey M DX Dark Blue Pearl M* E4 Bright Red D6 Blazing Yellow F1 Red G2 Redfire M * F1 Red G3 Pueblo Gold M* G3 Pueblo Gold M * FW Dark Green Satin M GG Forest Green M* GG Forest Green M * JM Dark Toreador Red M JM Dark Toreador Red PG Dark Amethyst M * L2 True Blue M T7 Dark Stone M PV White Chocolate Tri-Coat M * LD Md. Wedgewood Blue M UD Black T5 Dark Copper M T5 Dark Copper M Z1 Oxford White T7 Dark Stone M T7 Dark Stone M Z3 Silver M UA Black UD Black YN Silver M Z3 Silver M YZ Oxford White Z1 Oxford White Ford Ranger Ford Sport Trac CX Dark Shadow Grey M DX Dark Blue Pearl M * D3 Torch Red G2 Redfire M D6 Screaming Yellow -

Our Greatestmaids
our greatest maids yet introducinga whole new way to bridesmaid EXCLUSIVELY AT DAVID'S BRIDAL Mix-and-match dresses you won’t find anywhere else Thousands of ready-to-ship styles available in days, not months Versatile designs you'll wear again (and again) THE BLISS DRESS F20097, F20099, F20098 shown in Sangria, Marine & Gem THE ENCHANTED DRESS | F19933 shown in Sedona, Cinnamon & Desert Coral THE AMORE DRESS THE BLOOM DRESS F20131, F20135 F20233, F20217 shown in Chianti shown in Wine & Cinnamon scan me Guaranteed color A real-life fit based on the matching, no matter measurements of 10,000 women where or when you order Share this guide More sizes for every Boutique quality for way with your friends body, including 0–30 and less, because a fabulous look tall and standard lengths shouldn’t cost a fortune Our 50+ gorgeous shades are only available EXCLUSIVE here! We test each and every yard of fabric in three types of light to make sure colors PETAL* ROSE GOLD CAMEO BALLET* QUARTZ* ROSE GOLD CHIANTI* WINE* always match, no matter where or when you SEQUIN LACE & MESH METALLIC place your order. LACE & MESH colors NEW RUBY APPLE* SCARLET BEGONIA CORAL REEF PARFAIT DESERT SEDONA SEQUIN LACE & MESH COR AL* color-match guarantee NEW CINNAMON* SIENNA* MARIGOLD* CANARY MINT DUSTY MARTINI JUNIPER* SAGE* OLIVE GEM SPA OASIS MALIBU ICE BLUE DUSTY STEEL BLUE* MARINE* BLUE* NAV Y HORIZON* REGENCY SANGRIA PLUM* WISTERIA* LAVENDER IRIS* SEQUIN HAZE SAND BISCOTTI* GOLD CHAMPAGNE GOLD IVORY WHITE MYSTIC Marine, Wine, Desert Coral, Petal & Sand METALLIC SEQUIN LACE & MESH Flip to the Exclusive Collections Text COLOR to 38201 to section to see how many colors coordinate your party with GREY MERCURY PEWTER* BLACK* each dress comes in David's Bridal and The Black Tux. -

2021 Mopar® Touch-Up Paint Application Guide O.E
2021 MOPAR® TOUCH-UP PAINT APPLICATION GUIDE O.E. PAINT FOR THE PERFECT COLOR MATCH TOUCH-UP PAINT ASSORTMENT KIT & DISPLAY RACK 4-in-1 Paint Tube Assortment Kit ® 2019-2020 CHRYSLER, DODGE, JEEP®, RAM AND FIAT PAINT CODE SALES CODE COLOR PART NUMBER QT Y. VCA PCA FROSTBITE 06103278AA 4 VCD PCD BLACK EYE 06103284AA 4 VJB PJB GOLD RUS 06103282AA 4 VAE PAE SMOKE SHOW 06103276AA 4 VGV PGV GATOR 06103286AA 4 VEC PEC SINAMON STICK 06103280AA 4 TOTAL: 24 Order Assortment Kit with a display rack part #68493461AA or just the Display Rack part #68290303AA through DealerCONNECT. ® Mopar® FIAT Starter Kit PAINT CODE SALES CODE COLOR NAME PART NUMBER QT Y. VR-108/B PRT Rossa Perla/Deep Lava Red 68262121AA 1 VR-111/A PR1 Rosso/Red 68262127AA 1 VR-231/B PTA Mocha Latte/ Mocha Latte 68262117AA 1 VR-268/A PW3 Bianco/White 68262129AA 1 VR-296/A PWV Bianco Gelato (White Clear Coat) 68306235AA 1 VR-330/B PGG Verde Toscana (Green Metallic) 68306236AA 1 VR-331/B PJ1 Grigio Arte (Grey Clear Coat) 68306237AA 1 VR-348/B PSN Grigio Argento (Grey Metallic) 68306238AA 1 VR-390/B PGQ Verde Bosco Perla/Forest Green 68262123AA 1 VR-399/B PUL Bronzo Magnetico (Bronze Metallic) 68306239AA 1 VR-400/C PUM Bronzo Magnetico Opaco (Matte Bronze) 68306240AA 1 VR-483/B PBN Blu Chiaro/Light Blue 68262119AA 1 VR-530/A PBR Tornado Blue/Tornado Blue 68262133AA 1 VR-562/B PKP Arancio (Orange) 68306241AA 1 VR-601 PX8 Nero/Black 68262131AA 2 VR-609/B PDW Grigio Scuro/Grey Metallic/ 68262115AA 1 VR-612/A PAF Grigio Chiaro/Graphite Metallic/ (Light Grey) 68262113AA 1 VR-679/B PSA Brigio Graphite 68306242AA 1 VR-824/C PY3 Giallo Tristrato (Tricoat Yellow) 68306243AA 1 VR-830/B PYN Giallo/Yellow 68262125AA 1 VR-831/C PRB Rosso Amore 68306244AA 1 VR-888/B PB1 Blu Venezia (Blue Metallic) 68306245AA 1 VR-895/B PR2 Rosso Passione 68306246AA 1 TOTAL: 24 Order FIAT Starter Kit with a display rack part #68436632AA through DealerCONNECT.