Parameterization of Micro Satellite Launch Vehicle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Semi Cryogenic Propellants: an Overview of a Non Toxic Propellant for Delivering Heavier Payloads to Space
INTERNATIONAL JOURNAL FOR INNOVATIVE RESEARCH IN MULTIDISCIPLINARY FIELD ISSN: 2455-0620 Volume - 6, Issue - 10, Oct – 2020 Monthly, Peer-Reviewed, Refereed, Indexed Journal with IC Value: 86.87 Impact Factor: 6.719 Received Date: 12/10/2020 Acceptance Date: 26/10/2020 Publication Date: 31/10/2020 SEMI CRYOGENIC PROPELLANTS: AN OVERVIEW OF A NON TOXIC PROPELLANT FOR DELIVERING HEAVIER PAYLOADS TO SPACE 1Aiswarya A. Satheesan, 2Akash R S, 3Gokul Krishna Menon, 4Ishwaragowda V Patil 1, 2, 3Student, 4Assistant Professor 1, 2, 3ACE College of Engineering, Trivandrum, 4 Shree Devi Institute of Techchnology Email - [email protected], [email protected] Abstract: Semi cryogenic fueled rockets use refined kerosene instead of liquid hydrogen, which is used in combination with liquid oxygen as the propellant in the cryogenic engine which is stored in a normal temperature. The refined kerosene needs lesser space to make it possible to carry more propellant in the semi cryogenic fuel part. Semi cryogenics is more powerful, ecofriendly and the cost effective compared to cryogenic engines. Key Words: Semi cryogenics, Cryogenics, Propellant, ULV. 1. INTRODUCTION: Kerosene as a fuel has its advantage of burn off gas eco-friendly and cost effective and relative safety. Unlike liquid hydrogen and oxygen which has to store at -253 and 183 degree Celsius respectively, it is stable at room temperature. Kerosene is a fuel which produces line fumes in its paraffin form, it is considered environmentally friendly. It is a non-corrosive fuel, safe to store for a long time. Depending in what kind of container in which it is stored, kerosene can be kept in storage for a 1 year to 10 year. -

Access to Space Through Isro Launch Vehicles
Volume -2, Issue-4, October 2012 ACCESS TO SPACE THROUGH ISRO subsystems of a complex launch vehicle but also the maturity attained in conceiving, designing and realizing LAUNCH VEHICLES other vital elements viz., control, guidance, navigation Introduction : and staging systems. The nation’s capability to plan, integrate and carry out a satellite launch mission which is Climbing out of the Earth’s gravity well and transcending truly a multi-disciplinary technological challenge was the dense atmospheric shield is the most energy intensive proved on July 18, 1980 when India successfully orbited crucial first step in the journey into space and the Launch Rohini-1 satellite on SLV-3 E02 flight. Vehicles are the primary viable means of accomplishing this task. India acquired the capability to orbit a satellite While the sub-orbital sounding rockets which just carry in 1980, when SLV-3 the indigenously developed all the payload instruments upto a height of 100 to 200 solid launcher deployed the 40 kg Rohini satellite around kilometers have very few sub-systems apart from the earth. Tremendous progress has been made in this area propulsive device, a Satellite Launcher which has to in the last three decades and today, India is one among import a velocity of around 8 km/sec and precisely the leading space-faring nations with assured access to deliver the payload into a pre targeted injection vector in space through the work-horse operational launcher space has far more complex systems all of which have to PSLV, the Polar Satellite Launch Vehicle. function flawlessly for a successful orbital mission. -

MIT Japan Program Working Paper 01.10 the GLOBAL COMMERCIAL
MIT Japan Program Working Paper 01.10 THE GLOBAL COMMERCIAL SPACE LAUNCH INDUSTRY: JAPAN IN COMPARATIVE PERSPECTIVE Saadia M. Pekkanen Assistant Professor Department of Political Science Middlebury College Middlebury, VT 05753 [email protected] I am grateful to Marco Caceres, Senior Analyst and Director of Space Studies, Teal Group Corporation; Mark Coleman, Chemical Propulsion Information Agency (CPIA), Johns Hopkins University; and Takashi Ishii, General Manager, Space Division, The Society of Japanese Aerospace Companies (SJAC), Tokyo, for providing basic information concerning launch vehicles. I also thank Richard Samuels and Robert Pekkanen for their encouragement and comments. Finally, I thank Kartik Raj for his excellent research assistance. Financial suppport for the Japan portion of this project was provided graciously through a Postdoctoral Fellowship at the Harvard Academy of International and Area Studies. MIT Japan Program Working Paper Series 01.10 Center for International Studies Massachusetts Institute of Technology Room E38-7th Floor Cambridge, MA 02139 Phone: 617-252-1483 Fax: 617-258-7432 Date of Publication: July 16, 2001 © MIT Japan Program Introduction Japan has been seriously attempting to break into the commercial space launch vehicles industry since at least the mid 1970s. Yet very little is known about this story, and about the politics and perceptions that are continuing to drive Japanese efforts despite many outright failures in the indigenization of the industry. This story, therefore, is important not just because of the widespread economic and technological merits of the space launch vehicles sector which are considerable. It is also important because it speaks directly to the ongoing debates about the Japanese developmental state and, contrary to the new wisdom in light of Japan's recession, the continuation of its high technology policy as a whole. -

Sale Price Drives Potential Effects on DOD and Commercial Launch Providers
United States Government Accountability Office Report to Congressional Addressees August 2017 SURPLUS MISSILE MOTORS Sale Price Drives Potential Effects on DOD and Commercial Launch Providers Accessible Version GAO-17-609 August 2017 SURPLUS MISSILE MOTORS Sale Price Drives Potential Effects on DOD and Commercial Launch Providers Highlights of GAO-17-609, a report to congressional addressees Why GAO Did This Study What GAO Found The U.S. government spends over a The Department of Defense (DOD) could use several methods to set the sale billion dollars each year on launch prices of surplus intercontinental ballistic missile (ICBM) motors that could be activities as it strives to help develop a converted and used in vehicles for commercial launch if current rules prohibiting competitive market for space launches such sales were changed. One method would be to determine a breakeven and assure its access to space. Among price. Below this price, DOD would not recuperate its costs, and, above this others, one launch option is to use price, DOD would potentially save. GAO estimated that DOD could sell three vehicles derived from surplus ICBM Peacekeeper motors—the number required for one launch, or, a “motor set”—at motors such as those used on the Peacekeeper and Minuteman missiles. a breakeven price of about $8.36 million and two Minuteman II motors for about The Commercial Space Act of 1998 $3.96 million, as shown below. Other methods for determining motor prices, such prohibits the use of these motors for as fair market value as described in the Federal Accounting Standards Advisory commercial launches and limits their Board Handbook, resulted in stakeholder estimates ranging from $1.3 million per use in government launches in part to motor set to $11.2 million for a first stage Peacekeeper motor. -

Indian Remote Sensing Satellites (IRS)
Topic: Indian Remote Sensing Satellites (IRS) Course: Remote Sensing and GIS (CC-11) M.A. Geography (Sem.-3) By Dr. Md. Nazim Professor, Department of Geography Patna College, Patna University Lecture-5 Concept: India's remote sensing program was developed with the idea of applying space technologies for the benefit of human kind and the development of the country. The program involved the development of three principal capabilities. The first was to design, build and launch satellites to a sun synchronous orbit. The second was to establish and operate ground stations for spacecraft control, data transfer along with data processing and archival. The third was to use the data obtained for various applications on the ground. India demonstrated the ability of remote sensing for societal application by detecting coconut root-wilt disease from a helicopter mounted multispectral camera in 1970. This was followed by flying two experimental satellites, Bhaskara-1 in 1979 and Bhaskara-2 in 1981. These satellites carried optical and microwave payloads. India's remote sensing programme under the Indian Space Research Organization (ISRO) started off in 1988 with the IRS-1A, the first of the series of indigenous state-of-art operating remote sensing satellites, which was successfully launched into a polar sun-synchronous orbit on March 17, 1988 from the Soviet Cosmodrome at Baikonur. It has sensors like LISS-I which had a spatial resolution of 72.5 meters with a swath of 148 km on ground. LISS-II had two separate imaging sensors, LISS-II A and LISS-II B, with spatial resolution of 36.25 meters each and mounted on the spacecraft in such a way to provide a composite swath of 146.98 km on ground. -
User's Manual If Any
User’s Manual Issue 2/ Revision 0 September 2004 Approved and issued by ARIANESPACE Edouard Perez Senior Vice President Engineering Washington, D.C.,U.S.A. Singapore Siège social / Headquarters Tel : +33 1 60 87 60 00 Tel : +1 202 628-3936 Tel : +65 223 6426 Boulevard de l'Europe Fax : +33 1 60 87 62 47 Fax : +1 202 628-3949 Fax : +65 223 4268 B.P. 177 Tokyo Kourou 91006 Evry-Courcouronnes cedex S.A. au capital de 2 087 910 000 F Tel : +81 3 3592-2766 Tel : +594 33 67 07 www.arianespace.com France RCS Evry B 318 516 457 Fax : +81 3 3592-2768 Fax : +594 33 62 66 User’s Manual Preface This document contains the technical information which is necessary : - to assess compatibility of a spacecraft with the VEGA launches, - to prepare all the technical and operational documentation related to a launch of any spacecraft on VEGA. This document is revised periodically, comments and suggestions on all aspects of this manual will be encouraged and appreciated. Inquiries concerning clarification or interpretation of this manual should be directed to: ARIANESPACE Commercial Directorate / Technical Support Division B.P. 177 - 91006 EVRY Courcouronnes Cedex France Telephone: +33 1 60 87 62 87 Telefax : +33 1 60 87 64 59 Vega User’s manual Foreword Issue 2 FOREWORD The Vega launcher to orbit small payloads in Arianespace Service Vega is being developed within a European Program organised under the aegis of the European Space Agency. The launcher’s prime contractor is ELV S.p.A, a joint company of Fiat Avio and the Italian Space Agency (ASI). -
DEPARTMENT of SPACE DEMAND NO.92 Department of Space A
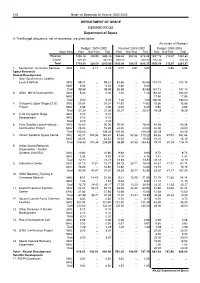
216 Notes on Demands for Grants, 2002-2003 DEPARTMENT OF SPACE DEMAND NO.92 Department of Space A. The Budget allocations, net of recoveries, are given below: (In crores of Rupees) Budget 2001-2002 Revised 2001-2002 Budget 2002-2003 Major Head Plan Non-Plan Total Plan Non-Plan Total Plan Non-Plan Total Revenue 1288.46 320.00 1608.46 1266.63 309.35 1575.98 1637.75 313.87 1951.62 Capital 421.54 ... 421.54 333.37 ... 333.37 312.25 ... 312.25 Total 1710.00 320.00 2030.00 1600.00 309.35 1909.35 1950.00 313.87 2263.87 1. Secretariat - Economic Services 3451 0.01 4.17 4.18 0.01 3.81 3.82 ... 3.85 3.85 Space Research Rocket Development 2. Geo -Synchronous Satellite Launch Vehicle 3402 98.31 ... 98.31 83.56 ... 83.56 101.13 ... 101.13 5402 0.35 ... 0.35 0.30 ... 0.30 ... ... ... Total 98.66 ... 98.66 83.86 ... 83.86 101.13 ... 101.13 3. GSLV MK-III Development. 3402 5.00 ... 5.00 1.00 ... 1.00 163.00 ... 163.00 5402 ... ... ... ... ... ... 17.00 ... 17.00 Total 5.00 ... 5.00 1.00 ... 1.00 180.00 ... 180.00 4. Cryogenic Upper Stage (CUS) 3402 20.34 ... 20.34 14.82 ... 14.82 15.56 ... 15.56 Project 5402 0.96 ... 0.96 5.49 ... 5.49 0.82 ... 0.82 Total 21.30 ... 21.30 20.31 ... 20.31 16.38 ... 16.38 5. C-20 Cryogenic Stage 3402 0.10 .. -

Quarterly Launch Report
Commercial Space Transportation QUARTERLY LAUNCH REPORT Featuring the launch results from the previous quarter and forecasts for the next two quarters 1st Quarter 1998 U n i t e d S t a t e s D e p a r t m e n t o f T r a n s p o r t a t i o n • F e d e r a l A v i a t i o n A d m i n i s t r a t i o n A s s o c i a t e A d m i n i s t r a t o r f o r C o m m e r c i a l S p a c e T r a n s p o r t a t i o n QUARTERLY LAUNCH REPORT 1 1ST QUARTER 1998 REPORT Objectives This report summarizes recent and scheduled worldwide commercial, civil, and military orbital space launch events. Scheduled launches listed in this report are vehicle/payload combinations that have been identified in open sources, including industry references, company manifests, periodicals, and government documents. Note that such dates are subject to change. This report highlights commercial launch activities, classifying commercial launches as one or more of the following: • Internationally competed launch events (i.e., launch opportunities considered available in principle to competitors in the international launch services market), • Any launches licensed by the Office of the Associate Administrator for Commercial Space Transportation of the Federal Aviation Administration under U.S. -

Soviet Reusable Space Systems Program: Implications for Space Operations in the 1990S
) (I ' ·-·.;;;;:, .. Dire.ctorate of . ttJ _)\ Intelligence . G0 Soviet Reusable Space Systems Program: Implications for Space Operations in the 1990s An Intelligence Assessment SOV 88-10061 sw 88-/IJOj6 Stpu'"hu J9RR Copy Warning Notice Intelligence Sources or Methods Involved (WNINTEL) National &curity Unauthorized Disclosure Information Subject to Criminal Sanctions Oissc:mination Control Abbr~riations NOFORN (NFJ Not releasable to foreien nationals NOSONTR~_CT_CN_C_I ___~N_o_t~re_lc_•_s•_b_le_t~o_c_M_l~rz~~-o_rs_o.,.r~c_o~nl_rz_c~lo_r~/c_o_ns_u_h_z_nt_s PROP IN (PRJ Caution-proprietary inform;.tion involved OR CON (OCJ Dissemination and Cltraction of inform.1tion ---···----------,--,---,---.,.---------,-----controlled by oricinator REl___ This inform3.tion h.u been :~uthorizcd for release to ... ___________,_ __ W_N ______ --:----- WNI ~TEL-Intcllia:cncc sources or mel hods involved A microfiche copy o( I his docu- Clauillcd bl men! is available front OIR/ Declassify: OADR DLB (~82-7177~ printed copies Derived from muhiplc sources from CPAS/IMC(~&l-HOJ; or AIM request to uscrid CPASIMCJ. Rceulu rcccip! of 01 reports can be am need chrouch CPAS/IMC. All material on this ~r:c . --·-------------------- is Unclassified. ') / ' Directorate or lntdligrocc Soviet Reusable Space Systems Program: Implications for Space Operations in the 1990s An lntdligcnce Assessment This paper was prepared b ,Qflicc of Soviet Anal)'sis. an<'.- ~f Science and Weapons Rescare #:ontributions fro. t?_o~ . Comments znd queries arc welcome and may be dircctcdl\0 . or to . USWR. J yrf sov 88-10061 SWS8-100l6 Scpumba 1933 I ' Soviet Reusable Space Systems Program: Implications for Space Operations in the_l990! Key Judgments The Soviets arc developing at least one, and possibly two, reusable space llffurmation availabl~ systems. -

Small Satellite Launch Vehicle from a Balloon Platform
Reinventing Space Conference BIS-RS-2015-60 Small satellite launch vehicle from a balloon platform Kieran Hayward Cranfield University José Mariano López-Urdiales Founder, zero2infinity 13th Reinventing Space Conference 9-12 November 2015 Oxford, UK Small Satellite Launch Vehicle from a Balloon Platform Kieran Hayward1 and Jose Mariano Lopez Urdiales2 1 Cranfield University, Cranfield, UK 2 zero2infinity, Barcelona, Spain Abstract In the last decade there has been growing use of smaller satellites (0-100kg) to conduct Earth observation and science missions and this industry is growing. 2014 saw a small satellite launch increase of 72% compared with 2013. Companies such as Planet Labs are starting to launch large numbers of small satellites. However, to date the use of small satellites has been restricted due to the limited launch availability to this class of satellite. Due to their small size these satellites are normally launched as secondary payloads on larger launch vehicles (such as Falcon 9 or Ariane 5). This restriction has severely limited the launch dates available to these small satellites and also limits their orbit selection. Due to the restrictions mentioned above and building on its experience in high-altitude ballooning zero2infinity has begun designing a new small satellite launch vehicle, called bloostar. This three-stage vehicle is designed to put a 75kg payload into a 600km sun synchronous orbit. It is launched from a high altitude helium balloon at 20km, at this altitude the atmospheric density is low enough (<7% of sea level density) that aerodynamic drag is negligible. Traditional launch vehicles, which are launched from sea level have to pass through the densest part of the atmosphere, incurring large amounts of aerodynamic drag. -

Sns College of Technology
SNS COLLEGE OF TECHNOLOGY (An Autonomous Institution) DEPARTMENT OF AERONAUTICAL ENGINEERING Subject Code & Name: 16AE409 ROCKETS AND MISSILES Date:09.07.19 DAY: 06 UNIT: 1: BASICS OF LAUNCH VEHICLES AND MISSILES TOPIC: 6: various Indian space launch vehicles : LVL3,PSLV,GSLV,ULV& HLV HISTORIC 1. SLV: Satellite Launch Vehicle Satellite Launch Vehicle-3 (SLV-3) was India's first experimental satellite launch vehicle, which was an all solid, four stage vehicle weighing 17 tonnes with a height of 22m and capable of placing 40 kg class payloads in Low Earth Orbit (LEO). SLV-3 was successfully launched on July 18, 1980 from Sriharikota Range (SHAR), when Rohini satellite, RS-1, was placed in orbit, thereby making India the sixth member of an exclusive club of space-faring nations. SLV-3 employed an open loop guidance (with stored pitch programme) to steer the vehicle in flight along a pre-determined trajectory. The first experimental flight of SLV-3, in August 1979, was only partially successful. Apart from the July 1980 launch, there were two more launches held in May 1981 and April 1983, orbiting Rohini satellites carrying remote sensing sensors. The successful culmination of the SLV-3 project showed the way to advanced launch vehicle projects such as the Augmented Satellite Launch Vehicle (ASLV), Polar Satellite Launch Vehicle (PSLV) and the Geosynchronous satellite Launch Vehicle (GSLV). 2. ASLV: Augmented Satellite Launch Vehicle With a lift off weight of 40 tonnes, the 24 m tall ASLV was configured as a five stage, all-solid propellant vehicle, with a mission of orbiting 150 kg class satellites into 400 km circular orbits. -

PSLV-C35 Successfully Launches 8 Satellites, Including Weather Satellite SCATSAT-1 by : INVC Team Published on : 26 Sep, 2016 02:14 PM IST
PSLV-C35 successfully launches 8 satellites, including weather satellite SCATSAT-1 By : INVC Team Published On : 26 Sep, 2016 02:14 PM IST INVC NEWS Sriharikota Union Minister of State (Independent Charge) for Development of North Eastern Region (DoNER), MoS PMO, Personnel, Public Grievances, Pensions, Atomic Energy and Space, Dr Jitendra Singh has congratulated the Indian Space Research Organisation (ISRO) on the successful launch of the Polar Satellite Launch Vehicle, PSLV-C35. Dr Jitendra Singh said, with the PSLV-C35 injecting all 8 satellites into orbit successfully, the textbook launch marks another milestone in ISRO’s history. The PSLV, in its 37th flight, PSLV-C35, was launched from the First Launch Pad (FLP) of Satish Dhawan Space Centre SHAR, Sriharikota this morning, carrying onboard the 371 kg SCATSAT-1 satellite for weather related studies and seven co-passenger satellites together weighing about 304 kg at lift off. The co-passenger satellites were from Algeria, Canada and the USA as well as two satellites from Indian University/Academic Institute. The total weight of all the eight satellites carried onboard PSLV-C35 is about 675 kg. Of the eight satellites carried by PSLV-C35, SCATSAT-1 is launched into a 730 km polar Sun Synchronous Orbit (SSO) inclined at an angle of 98.1 degree to the equator whereas the two Indian University/Academic Institute satellites and the five satellites from abroad were placed in a 689 km polar orbit of 98.21 degree inclination. This marks the first mission of PSLV in which payloads were launched into two different orbits. The PSLV-C35 also marked the 15th flight of PSLV in ‘XL’ configuration (with the use of solid strap-on moto URL : https://www.internationalnewsandviews.com/pslv-c35-successfully-launches-8-satellites-including-weather-satellite-scatsat-1 / 12th year of news and views excellency www.internationalnewsandviews.comCommitted to truth and impartiality Copyright © 2009 - 2019 International News and Views Corporation.