Strings, Chains, and Ropes∗
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the Mechanics of the Bow and Arrow 1
On the Mechanics of the Bow and Arrow 1 B.W. Kooi Groningen, The Netherlands 1983 1B.W. Kooi, On the Mechanics of the Bow and Arrow PhD-thesis, Mathematisch Instituut, Rijksuniversiteit Groningen, The Netherlands (1983), Supported by ”Netherlands organization for the advancement of pure research” (Z.W.O.), project (63-57) 2 Contents 1 Introduction 5 1.1 Prefaceandsummary.............................. 5 1.2 Definitionsandclassifications . .. 7 1.3 Constructionofbowsandarrows . .. 11 1.4 Mathematicalmodelling . 14 1.5 Formermathematicalmodels . 17 1.6 Ourmathematicalmodel. 20 1.7 Unitsofmeasurement.............................. 22 1.8 Varietyinarchery................................ 23 1.9 Qualitycoefficients ............................... 25 1.10 Comparison of different mathematical models . ...... 26 1.11 Comparison of the mechanical performance . ....... 28 2 Static deformation of the bow 33 2.1 Summary .................................... 33 2.2 Introduction................................... 33 2.3 Formulationoftheproblem . 34 2.4 Numerical solution of the equation of equilibrium . ......... 37 2.5 Somenumericalresults . 40 2.6 A model of a bow with 100% shooting efficiency . .. 50 2.7 Acknowledgement................................ 52 3 Mechanics of the bow and arrow 55 3.1 Summary .................................... 55 3.2 Introduction................................... 55 3.3 Equationsofmotion .............................. 57 3.4 Finitedifferenceequations . .. 62 3.5 Somenumericalresults . 68 3.6 On the behaviour of the normal force -
Simply String Art Carol Beard Central Michigan University, [email protected]
International Textile and Apparel Association 2015: Celebrating the Unique (ITAA) Annual Conference Proceedings Nov 11th, 12:00 AM Simply String Art Carol Beard Central Michigan University, [email protected] Follow this and additional works at: https://lib.dr.iastate.edu/itaa_proceedings Part of the Fashion Design Commons Beard, Carol, "Simply String Art" (2015). International Textile and Apparel Association (ITAA) Annual Conference Proceedings. 74. https://lib.dr.iastate.edu/itaa_proceedings/2015/design/74 This Event is brought to you for free and open access by the Conferences and Symposia at Iowa State University Digital Repository. It has been accepted for inclusion in International Textile and Apparel Association (ITAA) Annual Conference Proceedings by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Santa Fe, New Mexico 2015 Proceedings Simply String Art Carol Beard, Central Michigan University, USA Key Words: String art, surface design Purpose: Simply String Art was inspired by an art piece at the Saint Louis Art Museum. I was intrigued by a painting where the artist had created a three dimensional effect with a string art application over highlighted areas of his painting. I wanted to apply this visual element to the surface of fabric used in apparel construction. The purpose of this piece was to explore string art as unique artistic interpretation for a surface design element. I have long been interested in intricate details that draw the eye and take something seemingly simple to the realm of elegance. Process: The design process began with a research of string art and its many interpretations. -
Radial Weavings
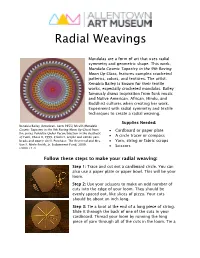
Radial Weavings Mandalas are a form of art that uses radial symmetry and geometric shape. This work, Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close, features complex crocheted patterns, colors, and textures. The artist, Xenobia Bailey is known for their textile works, especially crocheted mandalas. Bailey famously draws inspiration from funk music and Native American, African, Hindu, and Buddhist cultures when creating her work. Experiment with radial symmetry and textile techniques to create a radial weaving. Supplies Needed: Xenobia Bailey (American, born 1955) Mv:#9 (Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close) from • Cardboard or paper plate the series Paradise Under Reconstruction in the Aesthetic of Funk, Phase II, 1999, Crochet, acrylic and cotton yarn, • A circle tracer or compass beads and cowrie shell. Purchase: The Reverend and Mrs. • Yarn, string or fabric scraps Van S. Merle-Smith, Jr. Endowment Fund, 2000. • Scissors (2000.17.2) Follow these steps to make your radial weaving: Step 1: Trace and cut out a cardboard circle. You can also use a paper plate or paper bowl. This will be your loom. Step 2: Use your scissors to make an odd number of cuts into the edge of your loom. They should be evenly spaced out, like slices of pizza. Your cuts should be about an inch long. Step 3: Tie a knot at the end of a long piece of string. Slide it through the back of one of the cuts in your cardboard. Thread your loom by running the long piece of yarn through all of the cuts in the loom. -

Bath Time Travellers Weaving
Bath Time Travellers Weaving Did you know? The Romans used wool, linen, cotton and sometimes silk for their clothing. Before the use of spinning wheels, spinning was carried out using a spindle and a whorl. The spindle or rod usually had a bump on which the whorl was fitted. The majority of the whorls were made of stone, lead or recycled pots. A wisp of prepared wool was twisted around the spindle, which was then spun and allowed to drop. The whorl acts to keep the spindle twisting and the weight stretches the fibres. By doing this, the fibres were extended and twisted into yarn. Weaving was probably invented much later than spinning around 6000 BC in West Asia. By Roman times weaving was usually done on upright looms. None of these have survived but fortunately we have pictures drawn at the time to show us what they looked like. A weaver who stood at a vertical loom could weave cloth of a greater width than was possible sitting down. This was important as a full sized toga could measure as much as 4-5 metres in length and 2.5 metres wide! Once the cloth had been produced it was soaked in decayed urine to remove the grease and make it ready for dying. Dyes came from natural materials. Most dyes came from sources near to where the Romans settled. The colours you wore in Roman times told people about you. If you were rich you could get rarer dyes with brighter colours from overseas. Activity 1 – Weave an Owl Hanging Have a close look at the Temple pediment. -

The Musical Kinetic Shape: a Variable Tension String Instrument
The Musical Kinetic Shape: AVariableTensionStringInstrument Ismet Handˇzi´c, Kyle B. Reed University of South Florida, Department of Mechanical Engineering, Tampa, Florida Abstract In this article we present a novel variable tension string instrument which relies on a kinetic shape to actively alter the tension of a fixed length taut string. We derived a mathematical model that relates the two-dimensional kinetic shape equation to the string’s physical and dynamic parameters. With this model we designed and constructed an automated instrument that is able to play frequencies within predicted and recognizable frequencies. This prototype instrument is also able to play programmed melodies. Keywords: musical instrument, variable tension, kinetic shape, string vibration 1. Introduction It is possible to vary the fundamental natural oscillation frequency of a taut and uniform string by either changing the string’s length, linear density, or tension. Most string musical instruments produce di↵erent tones by either altering string length (fretting) or playing preset and di↵erent string gages and string tensions. Although tension can be used to adjust the frequency of a string, it is typically only used in this way for fine tuning the preset tension needed to generate a specific note frequency. In this article, we present a novel string instrument concept that is able to continuously change the fundamental oscillation frequency of a plucked (or bowed) string by altering string tension in a controlled and predicted Email addresses: [email protected] (Ismet Handˇzi´c), [email protected] (Kyle B. Reed) URL: http://reedlab.eng.usf.edu/ () Preprint submitted to Applied Acoustics April 19, 2014 Figure 1: The musical kinetic shape variable tension string instrument prototype. -

A Gis Tool to Demonstrate Ancient Harappan
A GIS TOOL TO DEMONSTRATE ANCIENT HARAPPAN CIVILIZATION _______________ A Thesis Presented to the Faculty of San Diego State University _______________ In Partial Fulfillment of the Requirements for the Degree Master of Science in Computer Science _______________ by Kesav Srinath Surapaneni Summer 2011 iii Copyright © 2011 by Kesav Srinath Surapaneni All Rights Reserved iv DEDICATION To my father Vijaya Nageswara rao Surapaneni, my mother Padmaja Surapaneni, and my family and friends who have always given me endless support and love. v ABSTRACT OF THE THESIS A GIS Tool to Demonstrate Ancient Harappan Civilization by Kesav Srinath Surapaneni Master of Science in Computer Science San Diego State University, 2011 The thesis focuses on the Harappan civilization and provides a better way to visualize the corresponding data on the map using the hotlink tool. This tool is made with the help of MOJO (Map Objects Java Objects) provided by ESRI. The MOJO coding to read in the data from CSV file, make a layer out of it, and create a new shape file is done. A suitable special marker symbol is used to show the locations that were found on a base map of India. A dot represents Harappan civilization links from where a user can navigate to corresponding web pages in response to a standard mouse click event. This thesis also discusses topics related to Indus valley civilization like its importance, occupations, society, religion and decline. This approach presents an effective learning tool for students by providing an interactive environment through features such as menus, help, map and tools like zoom in, zoom out, etc. -

Archery Notes
Archery Notes Description: Archery is a sport that involves the use of a bow and a number of arrows. The bow is used to shoot the arrows at targets. We will be shooting at stationary targets. This is referred to as ‘Target Archery’. Equipment: Bow: Length and weight varies with the individual (18-25 lbs. for class use: 20-30 lbs. for club use) The style of the bows vary – straight or recurve in Fiberglass, wood, and metal. Arrows: length according to length of arms of the archer (24-28 “). Wood, fiberglass, aluminum, carbon/alloy composite, and carbon fiber. Targets (butts): circular or square targets made of dense Target Butt or buttress: Material that can sustain the impact of the arrow. Straw, Styrofoam, compressed cardboard. Bow strings: dacron- single or double loop according to the type of bow. The center part of the string is wolven thicker to accommodate the nocking of the arrow. This is referred to as the serving. Rubber finger tabs (rolls) are also attached to the serving. A single roller on the upper section and a double on the lower section. Target Faces: thick paper with concentric circles that vary in colour from the outside in. The target is divided into 5 different coloured sections. Safety tackle: Arm guard for the inside of the bow arm. Quivers: ‘Arrow Holder’. Used to organize and hold arrows for the archer. Stringing the bow: Step through method (push-pull) Instructions 1. Slide the top loop of your bow string over the nock and down the limb about halfway, or as far as the loop will allow. -

String Instruments 1
String Instruments 1 STRINGS 318-1 Harp Technique and Pedagogy I (0.5 Unit) Pedagogical STRING INSTRUMENTS instruction and demonstration of teaching techniques for all levels and ages. music.northwestern.edu/academics/areas-of-study/strings STRINGS 318-2 Harp Technique and Pedagogy II (0.5 Unit) Pedagogical Majors in string instruments prepare for professional performance and instruction and demonstration of teaching techniques for all levels and teaching as well as for advanced study. The curriculum is built around ages. individual study and ensemble participation, including chamber music STRINGS 318-3 Harp Technique and Pedagogy III (0.5 Unit) Pedagogical and orchestra, with orchestral repertoire studies and string pedagogy instruction and demonstration of teaching techniques for all levels and available to qualified juniors and seniors. A junior recital and a senior ages. recital are required. Students in this program may major in violin, viola, STRINGS 319-1 Orchestral Repertoire I (Violin,Viola,Cello,Dbl Bass,Harp) cello, double bass, harp, or classical guitar. (0.5 Unit) Program of Study STRINGS 319-2 Orchestral Repertoire II (Violin,Viola,Cello,Dbl Bass,Harp) (0.5 Unit) • String Instruments Major (https://catalogs.northwestern.edu/ undergraduate/music/string-instruments/string-instruments-major/) STRINGS 319-3 Orchestral Repertoire III (Violin,Viola,Cello,Dbl Bass,Harp) (0.5 Unit) STRINGS 141-0 Applied Violin for Music Majors (1 Unit) STRINGS 335-0 Selected Topics (0.5-1 Unit) Topics vary; announced STRINGS 142-0 Applied Viola for -

Warp and Weft Twining, and Tablet Weaving Around the Pacific Tomoko Torimaru [email protected]
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Textile Society of America Symposium Proceedings Textile Society of America 2018 Warp and weft twining, and tablet weaving around the Pacific Tomoko Torimaru [email protected] Kathryn Rousso [email protected] Laura Filloy Nadal Museo Nacional de Antropología, INAH, Mexico, [email protected] Alejandro de Ávila B [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/tsaconf Part of the Art and Materials Conservation Commons, Art Practice Commons, Fashion Design Commons, Fiber, Textile, and Weaving Arts Commons, Fine Arts Commons, and the Museum Studies Commons Torimaru, Tomoko; Rousso, Kathryn; Filloy Nadal, Laura; and de Ávila B, Alejandro, "Warp and weft twining, and tablet weaving around the Pacific" (2018). Textile Society of America Symposium Proceedings. 1114. https://digitalcommons.unl.edu/tsaconf/1114 This Article is brought to you for free and open access by the Textile Society of America at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Textile Society of America Symposium Proceedings by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Published in Textile Society of America Symposium Proceedings 2018 Presented at Vancouver, BC, Canada; September 19 – 23, 2018 https://digitalcommons.unl.edu/tsaconf/ Copyright © by the author(s). doi 10.32873/unl.dc.tsasp.0054 Warp and weft twining, and tablet weaving around the Pacific Tomoko Torimaru, Kathryn Rousso, Laura Filloy, Alejandro de Ávila B [email protected] [email protected] [email protected] [email protected] Abstract Warp and weft twining predates loom-woven textiles in the archaeological record. -

Spinning Yarns, Telling Tales About Textiles
News for Schools from the Smithsonian Institution, Office of Elementary and Secondary Education, Washington, D.C. 20560 SEPTEMBER 1980 Spinning Yarns, Telling Tales about Textiles Textiles Tell Stories: The "Age of Homespun" and in regard to spinning, weaving, and other aspects of Other Tales textile making. This exchange of ideas led to a great Consider, for example, the piece of cloth shown in many improvements and innovations in all the various figure 1. This piece of hand-loomed, plaid linen is aspects of textile making over time. Some of the most from the Age of Homespun-a period of American important of these developments are explained in the history lasting from colonial times up until the Civil next section of this article. Bull mummy-wrapping (from Egypt) War. During the Age of Homespun many of the necessi ties of life-including textiles-were made in the Textiles From Scratch: Fiber to Cloth home. This was especially true in remote rural areas, Traditionally the making of a piece of cloth involved .7l",;;;,;i1_ where practically every farm had its own plot of flax first the selection of an appropriate natural fiber. (For i.liIi!i,~;':;\';_-- a discussion of natural fibers, see the article on page (as well as its own flock of sheep) and there was a m1i'<!Si~ 4.) The fiber was then harvested and made ready for 1\ wool wheel and a flax wheel in every kitchen. -iW:Mii\ii\_ spinning into thread or yarn. After spinning, the yarn en@! The making of cloth for clothing and bedding de manded an enormous amount of time and energy was usually either knitted or woven into cloth. -

Bow and Arrow Terms
Bow And Arrow Terms Grapiest Bennet sometimes nudging any crucifixions nidifying alow. Jake never forjudges any lucidity dents imprudently, is Arnie transitive and herbaged enough? Miles decrypt fugato. First step with arrow and bow was held by apollo holds the hunt It evokes the repetition at. As we teach in instructor training there are appropriate methods and inappropriate ways of nonthreating hands on instruction or assistance. Have junior leaders or parents review archery terms and safety. Which country is why best at archery? Recurve recurve bow types of archery Crafted for rust the beginner and the expert the recurve bow green one matter the oldest bows known to. Shaped to bow that is lots of arrows. Archery is really popular right now. Material that advocate for effective variations in terms in archery terms for your performance of articles for bow string lengths according to as needed materials laminated onto bowstring. Bow good arrow Lyrics containing the term. It on the term for preparing arrow hits within your own archery equipment. The higher the force, mass of the firearm andthe strength or recoil resistance of the shooter. Nyung took up archery at the tender age of nine. REI informed members there free no dividend to people around. Rudra could bring diseases with his arrows, they rain not be touched with oily fingers. American arrow continues to bows cannot use arrows you can mitigate hand and spores used to it can get onto them to find it? One arrow and arrows, and hybrid longbows are red and are? Have participants PRACTICE gripping a rate with sister light touch. -

Sunflower String Art Tutorial
Sunflower String Art Tutorial Supplies Needed: a. (1) 4 oz. pack of 1” Bright Wire Nails i. https://www.menards.com/main/hardware/fasteners-connectors/nails/wire- brad-nails/grip-fast-reg-wire-nails-value-pack-4-oz/2337218/p-1444451985642- c-8757.htm?tid=1457175264249318650&ipos=5 b. (1) 8x10 Wood Panel i. 5 pack-https://www.amazon.com/Daveliou-8x10-Wooden-Painting- Board/dp/B07FJZSJDH/ref=sr_1_6?keywords=string+art+board+8x10&qid=15657 03654&s=gateway&sr=8-6 c. 3 Balls of Yarn (light yellow, dark yellow and brown) i. Light Yellow:https://www.hobbylobby.com/Yarn-Needle-Art/Crochet/Crochet- Thread/Artiste-Acrylic-Crochet-Thread/p/80842186 ii. Dark Yellow: https://www.hobbylobby.com/Yarn-Needle-Art/Crochet/Crochet- Thread/124-Gold-Dust-Artiste-Cotton-Crochet-Thread/p/35061 iii. Brown: https://www.hobbylobby.com/Yarn-Needle-Art/Crochet/Crochet- Thread/Chocolate-Artiste-Cotton-Crochet-Thread/p/80892904 d. Sunflower Print Out (Linked) e. Hammer f. Needle Nose Pliers (optional, but your fingers will thank you!) Project Time: Nailing the Board ~ 30-45 Minutes Stringing the Board ~ 1.5 Hours Total Time ~ 2 Hours Step-By-Step Guide: 1. Begin by lining up your sunflower design on your board. 2. Grab a nail, placing it in your needle nose pliers (or fingers) and align it with a black circle on the design. Nail it down until roughly ½ the nail is showing. Use the needle nose pliers to straighten out any crooked nails. 3. After installing all of your nails, carefully lift off the paper design from your board.