The Musical Kinetic Shape: a Variable Tension String Instrument
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the Mechanics of the Bow and Arrow 1
On the Mechanics of the Bow and Arrow 1 B.W. Kooi Groningen, The Netherlands 1983 1B.W. Kooi, On the Mechanics of the Bow and Arrow PhD-thesis, Mathematisch Instituut, Rijksuniversiteit Groningen, The Netherlands (1983), Supported by ”Netherlands organization for the advancement of pure research” (Z.W.O.), project (63-57) 2 Contents 1 Introduction 5 1.1 Prefaceandsummary.............................. 5 1.2 Definitionsandclassifications . .. 7 1.3 Constructionofbowsandarrows . .. 11 1.4 Mathematicalmodelling . 14 1.5 Formermathematicalmodels . 17 1.6 Ourmathematicalmodel. 20 1.7 Unitsofmeasurement.............................. 22 1.8 Varietyinarchery................................ 23 1.9 Qualitycoefficients ............................... 25 1.10 Comparison of different mathematical models . ...... 26 1.11 Comparison of the mechanical performance . ....... 28 2 Static deformation of the bow 33 2.1 Summary .................................... 33 2.2 Introduction................................... 33 2.3 Formulationoftheproblem . 34 2.4 Numerical solution of the equation of equilibrium . ......... 37 2.5 Somenumericalresults . 40 2.6 A model of a bow with 100% shooting efficiency . .. 50 2.7 Acknowledgement................................ 52 3 Mechanics of the bow and arrow 55 3.1 Summary .................................... 55 3.2 Introduction................................... 55 3.3 Equationsofmotion .............................. 57 3.4 Finitedifferenceequations . .. 62 3.5 Somenumericalresults . 68 3.6 On the behaviour of the normal force -

African Music Vol 6 No 2(Seb).Cdr
94 JOURNAL OF INTERNATIONAL LIBRARY OF AFRICAN MUSIC THE GORA AND THE GRAND’ GOM-GOM: by ERICA MUGGLESTONE 1 INTRODUCTION For three centuries the interest of travellers and scholars alike has been aroused by the gora, an unbraced mouth-resonated musical bow peculiar to South Africa, because it is organologically unusual in that it is a blown chordophone.2 A split quill is attached to the bowstring at one end of the instrument. The string is passed through a hole in one end of the quill and secured; the other end of the quill is then bound or pegged to the stave. The string is lashed to the other end of the stave so that it may be tightened or loosened at will. The player holds the quill lightly bet ween his parted lips, and, by inhaling and exhaling forcefully, causes the quill (and with it the string) to vibrate. Of all the early descriptions of the gora, that of Peter Kolb,3 a German astronom er who resided at the Cape of Good Hope from 1705 to 1713, has been the most contentious. Not only did his character and his publication in general come under attack, but also his account of Khoikhoi4 musical bows in particular. Kolb’s text indicates that two types of musical bow were observed, to both of which he applied the name gom-gom. The use of the same name for both types of bow and the order in which these are described in the text, seems to imply that the second type is a variant of the first. -

Lab 12. Vibrating Strings
Lab 12. Vibrating Strings Goals • To experimentally determine the relationships between the fundamental resonant frequency of a vibrating string and its length, its mass per unit length, and the tension in the string. • To introduce a useful graphical method for testing whether the quantities x and y are related by a “simple power function” of the form y = axn. If so, the constants a and n can be determined from the graph. • To experimentally determine the relationship between resonant frequencies and higher order “mode” numbers. • To develop one general relationship/equation that relates the resonant frequency of a string to the four parameters: length, mass per unit length, tension, and mode number. Introduction Vibrating strings are part of our common experience. Which as you may have learned by now means that you have built up explanations in your subconscious about how they work, and that those explanations are sometimes self-contradictory, and rarely entirely correct. Musical instruments from all around the world employ vibrating strings to make musical sounds. Anyone who plays such an instrument knows that changing the tension in the string changes the pitch, which in physics terms means changing the resonant frequency of vibration. Similarly, changing the thickness (and thus the mass) of the string also affects its sound (frequency). String length must also have some effect, since a bass violin is much bigger than a normal violin and sounds much different. The interplay between these factors is explored in this laboratory experi- ment. You do not need to know physics to understand how instruments work. In fact, in the course of this lab alone you will engage with material which entire PhDs in music theory have been written. -

The Science of String Instruments
The Science of String Instruments Thomas D. Rossing Editor The Science of String Instruments Editor Thomas D. Rossing Stanford University Center for Computer Research in Music and Acoustics (CCRMA) Stanford, CA 94302-8180, USA [email protected] ISBN 978-1-4419-7109-8 e-ISBN 978-1-4419-7110-4 DOI 10.1007/978-1-4419-7110-4 Springer New York Dordrecht Heidelberg London # Springer Science+Business Media, LLC 2010 All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, LLC, 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks, and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed on acid-free paper Springer is part of Springer ScienceþBusiness Media (www.springer.com) Contents 1 Introduction............................................................... 1 Thomas D. Rossing 2 Plucked Strings ........................................................... 11 Thomas D. Rossing 3 Guitars and Lutes ........................................................ 19 Thomas D. Rossing and Graham Caldersmith 4 Portuguese Guitar ........................................................ 47 Octavio Inacio 5 Banjo ...................................................................... 59 James Rae 6 Mandolin Family Instruments........................................... 77 David J. Cohen and Thomas D. Rossing 7 Psalteries and Zithers .................................................... 99 Andres Peekna and Thomas D. -
Simply String Art Carol Beard Central Michigan University, [email protected]
International Textile and Apparel Association 2015: Celebrating the Unique (ITAA) Annual Conference Proceedings Nov 11th, 12:00 AM Simply String Art Carol Beard Central Michigan University, [email protected] Follow this and additional works at: https://lib.dr.iastate.edu/itaa_proceedings Part of the Fashion Design Commons Beard, Carol, "Simply String Art" (2015). International Textile and Apparel Association (ITAA) Annual Conference Proceedings. 74. https://lib.dr.iastate.edu/itaa_proceedings/2015/design/74 This Event is brought to you for free and open access by the Conferences and Symposia at Iowa State University Digital Repository. It has been accepted for inclusion in International Textile and Apparel Association (ITAA) Annual Conference Proceedings by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Santa Fe, New Mexico 2015 Proceedings Simply String Art Carol Beard, Central Michigan University, USA Key Words: String art, surface design Purpose: Simply String Art was inspired by an art piece at the Saint Louis Art Museum. I was intrigued by a painting where the artist had created a three dimensional effect with a string art application over highlighted areas of his painting. I wanted to apply this visual element to the surface of fabric used in apparel construction. The purpose of this piece was to explore string art as unique artistic interpretation for a surface design element. I have long been interested in intricate details that draw the eye and take something seemingly simple to the realm of elegance. Process: The design process began with a research of string art and its many interpretations. -
Radial Weavings
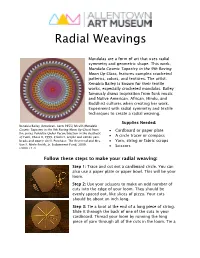
Radial Weavings Mandalas are a form of art that uses radial symmetry and geometric shape. This work, Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close, features complex crocheted patterns, colors, and textures. The artist, Xenobia Bailey is known for their textile works, especially crocheted mandalas. Bailey famously draws inspiration from funk music and Native American, African, Hindu, and Buddhist cultures when creating her work. Experiment with radial symmetry and textile techniques to create a radial weaving. Supplies Needed: Xenobia Bailey (American, born 1955) Mv:#9 (Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close) from • Cardboard or paper plate the series Paradise Under Reconstruction in the Aesthetic of Funk, Phase II, 1999, Crochet, acrylic and cotton yarn, • A circle tracer or compass beads and cowrie shell. Purchase: The Reverend and Mrs. • Yarn, string or fabric scraps Van S. Merle-Smith, Jr. Endowment Fund, 2000. • Scissors (2000.17.2) Follow these steps to make your radial weaving: Step 1: Trace and cut out a cardboard circle. You can also use a paper plate or paper bowl. This will be your loom. Step 2: Use your scissors to make an odd number of cuts into the edge of your loom. They should be evenly spaced out, like slices of pizza. Your cuts should be about an inch long. Step 3: Tie a knot at the end of a long piece of string. Slide it through the back of one of the cuts in your cardboard. Thread your loom by running the long piece of yarn through all of the cuts in the loom. -

Bath Time Travellers Weaving
Bath Time Travellers Weaving Did you know? The Romans used wool, linen, cotton and sometimes silk for their clothing. Before the use of spinning wheels, spinning was carried out using a spindle and a whorl. The spindle or rod usually had a bump on which the whorl was fitted. The majority of the whorls were made of stone, lead or recycled pots. A wisp of prepared wool was twisted around the spindle, which was then spun and allowed to drop. The whorl acts to keep the spindle twisting and the weight stretches the fibres. By doing this, the fibres were extended and twisted into yarn. Weaving was probably invented much later than spinning around 6000 BC in West Asia. By Roman times weaving was usually done on upright looms. None of these have survived but fortunately we have pictures drawn at the time to show us what they looked like. A weaver who stood at a vertical loom could weave cloth of a greater width than was possible sitting down. This was important as a full sized toga could measure as much as 4-5 metres in length and 2.5 metres wide! Once the cloth had been produced it was soaked in decayed urine to remove the grease and make it ready for dying. Dyes came from natural materials. Most dyes came from sources near to where the Romans settled. The colours you wore in Roman times told people about you. If you were rich you could get rarer dyes with brighter colours from overseas. Activity 1 – Weave an Owl Hanging Have a close look at the Temple pediment. -

The Physics of Sound 1
The Physics of Sound 1 The Physics of Sound Sound lies at the very center of speech communication. A sound wave is both the end product of the speech production mechanism and the primary source of raw material used by the listener to recover the speaker's message. Because of the central role played by sound in speech communication, it is important to have a good understanding of how sound is produced, modified, and measured. The purpose of this chapter will be to review some basic principles underlying the physics of sound, with a particular focus on two ideas that play an especially important role in both speech and hearing: the concept of the spectrum and acoustic filtering. The speech production mechanism is a kind of assembly line that operates by generating some relatively simple sounds consisting of various combinations of buzzes, hisses, and pops, and then filtering those sounds by making a number of fine adjustments to the tongue, lips, jaw, soft palate, and other articulators. We will also see that a crucial step at the receiving end occurs when the ear breaks this complex sound into its individual frequency components in much the same way that a prism breaks white light into components of different optical frequencies. Before getting into these ideas it is first necessary to cover the basic principles of vibration and sound propagation. Sound and Vibration A sound wave is an air pressure disturbance that results from vibration. The vibration can come from a tuning fork, a guitar string, the column of air in an organ pipe, the head (or rim) of a snare drum, steam escaping from a radiator, the reed on a clarinet, the diaphragm of a loudspeaker, the vocal cords, or virtually anything that vibrates in a frequency range that is audible to a listener (roughly 20 to 20,000 cycles per second for humans). -

A Comparison of Viola Strings with Harmonic Frequency Analysis
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Student Research, Creative Activity, and Performance - School of Music Music, School of 5-2011 A Comparison of Viola Strings with Harmonic Frequency Analysis Jonathan Paul Crosmer University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/musicstudent Part of the Music Commons Crosmer, Jonathan Paul, "A Comparison of Viola Strings with Harmonic Frequency Analysis" (2011). Student Research, Creative Activity, and Performance - School of Music. 33. https://digitalcommons.unl.edu/musicstudent/33 This Article is brought to you for free and open access by the Music, School of at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Student Research, Creative Activity, and Performance - School of Music by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. A COMPARISON OF VIOLA STRINGS WITH HARMONIC FREQUENCY ANALYSIS by Jonathan P. Crosmer A DOCTORAL DOCUMENT Presented to the Faculty of The Graduate College at the University of Nebraska In Partial Fulfillment of Requirements For the Degree of Doctor of Musical Arts Major: Music Under the Supervision of Professor Clark E. Potter Lincoln, Nebraska May, 2011 A COMPARISON OF VIOLA STRINGS WITH HARMONIC FREQUENCY ANALYSIS Jonathan P. Crosmer, D.M.A. University of Nebraska, 2011 Adviser: Clark E. Potter Many brands of viola strings are available today. Different materials used result in varying timbres. This study compares 12 popular brands of strings. Each set of strings was tested and recorded on four violas. We allowed two weeks after installation for each string set to settle, and we were careful to control as many factors as possible in the recording process. -
Experiment 12
Experiment 12 Velocity and Propagation of Waves 12.1 Objective To use the phenomenon of resonance to determine the velocity of the propagation of waves in taut strings and wires. 12.2 Discussion Any medium under tension or stress has the following property: disturbances, motions of the matter of which the medium consists, are propagated through the medium. When the disturbances are periodic, they are called waves, and when the disturbances are simple harmonic, the waves are sinusoidal and are characterized by a common wavelength and frequency. The velocity of propagation of a disturbance, whether or not it is periodic, depends generally upon the tension or stress in the medium and on the density of the medium. The greater the stress: the greater the velocity; and the greater the density: the smaller the velocity. In the case of a taut string or wire, the velocity v depends upon the tension T in the string or wire and the mass per unit length µ of the string or wire. Theory predicts that the relation should be T v2 = (12.1) µ Most disturbances travel so rapidly that a direct determination of their velocity is not possible. However, when the disturbance is simple harmonic, the sinusoidal character of the waves provides a simple method by which the velocity of the waves can be indirectly determined. This determination involves the frequency f and wavelength λ of the wave. Here f is the frequency of the simple harmonic motion of the medium and λ is from any point of the wave to the next point of the same phase. -

A Gis Tool to Demonstrate Ancient Harappan
A GIS TOOL TO DEMONSTRATE ANCIENT HARAPPAN CIVILIZATION _______________ A Thesis Presented to the Faculty of San Diego State University _______________ In Partial Fulfillment of the Requirements for the Degree Master of Science in Computer Science _______________ by Kesav Srinath Surapaneni Summer 2011 iii Copyright © 2011 by Kesav Srinath Surapaneni All Rights Reserved iv DEDICATION To my father Vijaya Nageswara rao Surapaneni, my mother Padmaja Surapaneni, and my family and friends who have always given me endless support and love. v ABSTRACT OF THE THESIS A GIS Tool to Demonstrate Ancient Harappan Civilization by Kesav Srinath Surapaneni Master of Science in Computer Science San Diego State University, 2011 The thesis focuses on the Harappan civilization and provides a better way to visualize the corresponding data on the map using the hotlink tool. This tool is made with the help of MOJO (Map Objects Java Objects) provided by ESRI. The MOJO coding to read in the data from CSV file, make a layer out of it, and create a new shape file is done. A suitable special marker symbol is used to show the locations that were found on a base map of India. A dot represents Harappan civilization links from where a user can navigate to corresponding web pages in response to a standard mouse click event. This thesis also discusses topics related to Indus valley civilization like its importance, occupations, society, religion and decline. This approach presents an effective learning tool for students by providing an interactive environment through features such as menus, help, map and tools like zoom in, zoom out, etc. -

AN INTRODUCTION to MUSIC THEORY Revision A
AN INTRODUCTION TO MUSIC THEORY Revision A By Tom Irvine Email: [email protected] July 4, 2002 ________________________________________________________________________ Historical Background Pythagoras of Samos was a Greek philosopher and mathematician, who lived from approximately 560 to 480 BC. Pythagoras and his followers believed that all relations could be reduced to numerical relations. This conclusion stemmed from observations in music, mathematics, and astronomy. Pythagoras studied the sound produced by vibrating strings. He subjected two strings to equal tension. He then divided one string exactly in half. When he plucked each string, he discovered that the shorter string produced a pitch which was one octave higher than the longer string. A one-octave separation occurs when the higher frequency is twice the lower frequency. German scientist Hermann Helmholtz (1821-1894) made further contributions to music theory. Helmholtz wrote “On the Sensations of Tone” to establish the scientific basis of musical theory. Natural Frequencies of Strings A note played on a string has a fundamental frequency, which is its lowest natural frequency. The note also has overtones at consecutive integer multiples of its fundamental frequency. Plucking a string thus excites a number of tones. Ratios The theories of Pythagoras and Helmholz depend on the frequency ratios shown in Table 1. Table 1. Standard Frequency Ratios Ratio Name 1:1 Unison 1:2 Octave 1:3 Twelfth 2:3 Fifth 3:4 Fourth 4:5 Major Third 3:5 Major Sixth 5:6 Minor Third 5:8 Minor Sixth 1 These ratios apply both to a fundamental frequency and its overtones, as well as to relationship between separate keys.