Dynamics of the Bow and Arrow
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ARROWS SUPREME, by American
CROSSBOWS FOR VIETNAM! VOLCANOLAND HUNTING PROFESSIONAL PERFORMANCE GUARANTEED OR YOUR MONEY BACK! the atomic bow The bold techniques of nuclear impregnated with a plastic mon chemistry have created the first omer and then atomically hard major chang,e in bowmaking ma ened. Wing's PRESENTATION II terials since the introduction of is a good example of the startling fiberglas. For years, archery results! The Lockwood riser in people have been looking for this bow is five times stronger improved woods. We've wanted than ordinary wood. It has 60% more beautiful types. Stronger more mass weight to keep you 1 woods. Woods with more mass on target. It has greater resist weight. We've searched for ways ance to abrasion and moisture. to protect wood against mois~ And the natural grain beauty of ture. What we were really after the wood is brought out to the turned out to be something bet fullest extent by the Lockwood COMING APRIL 1 &2 ter than the real thing. Wing found process. The PRESENTATION II 9th Annual International it in new Lockwood. An out PRESENTATION II. .. ......... •• $150.00 is one of several atomic bows Fair enough! I'm Interested In PROFESSIONAL PERFORMANCE growth of studies conducted by PRESENTATION I . ••• . •.• . •• •• $115.00 Indoor Archery Tournament waiting for you at your Wing the Atomic Energy Commission, WHITE WING • . • • • • • • . • . • • . • • $89.95 dealer. Ask him to show you our World's Largest SWIFT WING ..• ••••. ••••• •• $59.95 Lockwood is ordinary fine wood FALCON ••.••• •••• • . ••••. •• $29.95 new designs for 1967. Participating Sports Event Cobo Hall, Detroit Sponsored by Ben Pearson, Inc. -

The Swinging Spring: Regular and Chaotic Motion
References The Swinging Spring: Regular and Chaotic Motion Leah Ganis May 30th, 2013 Leah Ganis The Swinging Spring: Regular and Chaotic Motion References Outline of Talk I Introduction to Problem I The Basics: Hamiltonian, Equations of Motion, Fixed Points, Stability I Linear Modes I The Progressing Ellipse and Other Regular Motions I Chaotic Motion I References Leah Ganis The Swinging Spring: Regular and Chaotic Motion References Introduction The swinging spring, or elastic pendulum, is a simple mechanical system in which many different types of motion can occur. The system is comprised of a heavy mass, attached to an essentially massless spring which does not deform. The system moves under the force of gravity and in accordance with Hooke's Law. z y r φ x k m Leah Ganis The Swinging Spring: Regular and Chaotic Motion References The Basics We can write down the equations of motion by finding the Lagrangian of the system and using the Euler-Lagrange equations. The Lagrangian, L is given by L = T − V where T is the kinetic energy of the system and V is the potential energy. Leah Ganis The Swinging Spring: Regular and Chaotic Motion References The Basics In Cartesian coordinates, the kinetic energy is given by the following: 1 T = m(_x2 +y _ 2 +z _2) 2 and the potential is given by the sum of gravitational potential and the spring potential: 1 V = mgz + k(r − l )2 2 0 where m is the mass, g is the gravitational constant, k the spring constant, r the stretched length of the spring (px2 + y 2 + z2), and l0 the unstretched length of the spring. -

Arrow Company Profile
Fact Sheet Executive Officers Arrow Company Michael J. Long Chairman, President and Chief Executive Officer Profile Paul J. Reilly Arrow is a global provider of products, services, and solutions to industrial Executive Vice President, Finance and Operations, and Chief Financial Officer and commercial users of electronic components and enterprise computing solutions, with 2012 sales of $20.4 billion. Arrow serves as a supply channel Peter S. Brown partner for over 100,000 original equipment manufacturers, contract Senior Vice President, General Counsel manufacturers, and commercial customers through a global network of more and Secretary than 470 locations in 55 countries. A Fortune 150 company with 16,500 Andrew S. Bryant employees worldwide, Arrow brings the technology solutions of its suppliers President, Global Enterprise to a breadth of markets, including industrial equipment, information systems, Computing Solutions automotive and transportation, aerospace and defense, medical and life Vincent P. Melvin sciences, telecommunications and consumer electronics, and helps customers Vice President and Chief Information Officer introduce innovative products, reduce their time to market, and enhance their M. Catherine Morris overall competiveness. Senior Vice President and Chief Strategy Officer FAST FACTS Eric J. Schuck President, Global Components > Ticker Symbol: ARW (NYSE) > Fortune 500 Ranking1: 141 Gretchen K. Zech > 2012 Sales: $20.4 billion > Employees Worldwide: 16,500 Senior Vice President, Global Human - Global Components: $13.4 > Customers Worldwide: 100,000 Resources billion - Global Enterprise Computing > Industry: Electronic Solutions: $7 billion Components and Computer Products Distribution 20122012 Sales Sales by Geographic by Geographic Region Region > 2012 Net Income: $506.3 million > Founded: 1935 19% ASIA/PACIFIC > 2012 Operating Income: > Incorporated: 1946 52% AMERICAS $804.1 million > Public: 1961 > 2012 EPS: $4.56 > Website: www.arrow.com > Locations: more than 470 worldwide 29% 1 Ranking of the largest U.S. -

On the Mechanics of the Bow and Arrow 1
On the Mechanics of the Bow and Arrow 1 B.W. Kooi Groningen, The Netherlands 1983 1B.W. Kooi, On the Mechanics of the Bow and Arrow PhD-thesis, Mathematisch Instituut, Rijksuniversiteit Groningen, The Netherlands (1983), Supported by ”Netherlands organization for the advancement of pure research” (Z.W.O.), project (63-57) 2 Contents 1 Introduction 5 1.1 Prefaceandsummary.............................. 5 1.2 Definitionsandclassifications . .. 7 1.3 Constructionofbowsandarrows . .. 11 1.4 Mathematicalmodelling . 14 1.5 Formermathematicalmodels . 17 1.6 Ourmathematicalmodel. 20 1.7 Unitsofmeasurement.............................. 22 1.8 Varietyinarchery................................ 23 1.9 Qualitycoefficients ............................... 25 1.10 Comparison of different mathematical models . ...... 26 1.11 Comparison of the mechanical performance . ....... 28 2 Static deformation of the bow 33 2.1 Summary .................................... 33 2.2 Introduction................................... 33 2.3 Formulationoftheproblem . 34 2.4 Numerical solution of the equation of equilibrium . ......... 37 2.5 Somenumericalresults . 40 2.6 A model of a bow with 100% shooting efficiency . .. 50 2.7 Acknowledgement................................ 52 3 Mechanics of the bow and arrow 55 3.1 Summary .................................... 55 3.2 Introduction................................... 55 3.3 Equationsofmotion .............................. 57 3.4 Finitedifferenceequations . .. 62 3.5 Somenumericalresults . 68 3.6 On the behaviour of the normal force -

The Bow and Arrow in the Book of Mormon
The Bow and Arrow in the Book of Mormon William J. Hamblin The distinctive characteristic of missile weapons used in combat is that a warrior throws or propels them to injure enemies at a distance.1 The great variety of missiles invented during the thousands of years of recorded warfare can be divided into four major technological categories, according to the means of propulsion. The simplest, including javelins and stones, is propelled by unaided human muscles. The second technological category — which uses mechanical devices to multiply, store, and transfer limited human energy, giving missiles greater range and power — includes bows and slings. Beginning in China in the late twelfth century and reaching Western Europe by the fourteenth century, the development of gunpowder as a missile propellant created the third category. In the twentieth century, liquid fuels and engines have led to the development of aircraft and modern ballistic missiles, the fourth category. Before gunpowder weapons, all missiles had fundamental limitations on range and effectiveness due to the lack of energy sources other than human muscles and simple mechanical power. The Book of Mormon mentions only early forms of pregunpowder missile weapons. The major military advantage of missile weapons is that they allow a soldier to injure his enemy from a distance, thereby leaving the soldier relatively safe from counterattacks with melee weapons. But missile weapons also have some signicant disadvantages. First, a missile weapon can be used only once: when a javelin or arrow has been cast, it generally cannot be used again. (Of course, a soldier may carry more than one javelin or arrow.) Second, control over a missile weapon tends to be limited; once a soldier casts a missile, he has no further control over the direction it will take. -

Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda
Dynamics of the Elastic Pendulum Qisong Xiao; Shenghao Xia ; Corey Zammit; Nirantha Balagopal; Zijun Li Agenda • Introduction to the elastic pendulum problem • Derivations of the equations of motion • Real-life examples of an elastic pendulum • Trivial cases & equilibrium states • MATLAB models The Elastic Problem (Simple Harmonic Motion) 푑2푥 푑2푥 푘 • 퐹 = 푚 = −푘푥 = − 푥 푛푒푡 푑푡2 푑푡2 푚 • Solve this differential equation to find 푥 푡 = 푐1 cos 휔푡 + 푐2 sin 휔푡 = 퐴푐표푠(휔푡 − 휑) • With velocity and acceleration 푣 푡 = −퐴휔 sin 휔푡 + 휑 푎 푡 = −퐴휔2cos(휔푡 + 휑) • Total energy of the system 퐸 = 퐾 푡 + 푈 푡 1 1 1 = 푚푣푡2 + 푘푥2 = 푘퐴2 2 2 2 The Pendulum Problem (with some assumptions) • With position vector of point mass 푥 = 푙 푠푖푛휃푖 − 푐표푠휃푗 , define 푟 such that 푥 = 푙푟 and 휃 = 푐표푠휃푖 + 푠푖푛휃푗 • Find the first and second derivatives of the position vector: 푑푥 푑휃 = 푙 휃 푑푡 푑푡 2 푑2푥 푑2휃 푑휃 = 푙 휃 − 푙 푟 푑푡2 푑푡2 푑푡 • From Newton’s Law, (neglecting frictional force) 푑2푥 푚 = 퐹 + 퐹 푑푡2 푔 푡 The Pendulum Problem (with some assumptions) Defining force of gravity as 퐹푔 = −푚푔푗 = 푚푔푐표푠휃푟 − 푚푔푠푖푛휃휃 and tension of the string as 퐹푡 = −푇푟 : 2 푑휃 −푚푙 = 푚푔푐표푠휃 − 푇 푑푡 푑2휃 푚푙 = −푚푔푠푖푛휃 푑푡2 Define 휔0 = 푔/푙 to find the solution: 푑2휃 푔 = − 푠푖푛휃 = −휔2푠푖푛휃 푑푡2 푙 0 Derivation of Equations of Motion • m = pendulum mass • mspring = spring mass • l = unstreatched spring length • k = spring constant • g = acceleration due to gravity • Ft = pre-tension of spring 푚푔−퐹 • r = static spring stretch, 푟 = 푡 s 푠 푘 • rd = dynamic spring stretch • r = total spring stretch 푟푠 + 푟푑 Derivation of Equations of Motion -
Simply String Art Carol Beard Central Michigan University, [email protected]
International Textile and Apparel Association 2015: Celebrating the Unique (ITAA) Annual Conference Proceedings Nov 11th, 12:00 AM Simply String Art Carol Beard Central Michigan University, [email protected] Follow this and additional works at: https://lib.dr.iastate.edu/itaa_proceedings Part of the Fashion Design Commons Beard, Carol, "Simply String Art" (2015). International Textile and Apparel Association (ITAA) Annual Conference Proceedings. 74. https://lib.dr.iastate.edu/itaa_proceedings/2015/design/74 This Event is brought to you for free and open access by the Conferences and Symposia at Iowa State University Digital Repository. It has been accepted for inclusion in International Textile and Apparel Association (ITAA) Annual Conference Proceedings by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Santa Fe, New Mexico 2015 Proceedings Simply String Art Carol Beard, Central Michigan University, USA Key Words: String art, surface design Purpose: Simply String Art was inspired by an art piece at the Saint Louis Art Museum. I was intrigued by a painting where the artist had created a three dimensional effect with a string art application over highlighted areas of his painting. I wanted to apply this visual element to the surface of fabric used in apparel construction. The purpose of this piece was to explore string art as unique artistic interpretation for a surface design element. I have long been interested in intricate details that draw the eye and take something seemingly simple to the realm of elegance. Process: The design process began with a research of string art and its many interpretations. -
Radial Weavings
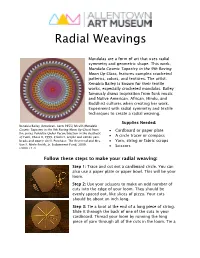
Radial Weavings Mandalas are a form of art that uses radial symmetry and geometric shape. This work, Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close, features complex crocheted patterns, colors, and textures. The artist, Xenobia Bailey is known for their textile works, especially crocheted mandalas. Bailey famously draws inspiration from funk music and Native American, African, Hindu, and Buddhist cultures when creating her work. Experiment with radial symmetry and textile techniques to create a radial weaving. Supplies Needed: Xenobia Bailey (American, born 1955) Mv:#9 (Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close) from • Cardboard or paper plate the series Paradise Under Reconstruction in the Aesthetic of Funk, Phase II, 1999, Crochet, acrylic and cotton yarn, • A circle tracer or compass beads and cowrie shell. Purchase: The Reverend and Mrs. • Yarn, string or fabric scraps Van S. Merle-Smith, Jr. Endowment Fund, 2000. • Scissors (2000.17.2) Follow these steps to make your radial weaving: Step 1: Trace and cut out a cardboard circle. You can also use a paper plate or paper bowl. This will be your loom. Step 2: Use your scissors to make an odd number of cuts into the edge of your loom. They should be evenly spaced out, like slices of pizza. Your cuts should be about an inch long. Step 3: Tie a knot at the end of a long piece of string. Slide it through the back of one of the cuts in your cardboard. Thread your loom by running the long piece of yarn through all of the cuts in the loom. -

Morphology of Modern Arrowhead Tips on Human Skin Analog*
J Forensic Sci, January 2018, Vol. 63, No. 1 doi: 10.1111/1556-4029.13502 PAPER Available online at: onlinelibrary.wiley.com PATHOLOGY/BIOLOGY LokMan Sung,1,2 M.D.; Kilak Kesha,3 M.D.; Jeffrey Hudson,4,5 M.D.; Kelly Root,1 and Leigh Hlavaty,1,2 M.D. Morphology of Modern Arrowhead Tips on Human Skin Analog* ABSTRACT: Archery has experienced a recent resurgence in participation and has seen increases in archery range attendance and in chil- dren and young adults seeking archery lessons. Popular literature and movies prominently feature protagonists well versed in this form of weap- onry. Periodic homicide cases in the United States involving bows are reported, and despite this and the current interest in the field, there are no manuscripts published on a large series of arrow wounds. This experiment utilizes a broad selection of modern arrowheads to create wounds for comparison. While general appearances mimicked the arrowhead shape, details such as the presence of abrasions were greatly influenced by the design of the arrowhead tip. Additionally, in the absence of projectiles or available history, arrowhead injuries can mimic other instruments causing penetrating wounds. A published resource on arrowhead injuries would allow differentiation of causes of injury by forensic scientists. KEYWORDS: forensic science, forensic pathology, compound bow, arrow, broadhead, morphology Archery, defined as the art, practice, and skill of shooting arrows While investigations into the penetrating ability of arrows with a bow, is indelibly entwined in human history. Accounts of have been published (5), this article is the first large-scale study the bow and arrow can be chronicled throughout human civiliza- evaluating the cutaneous morphology of modern broadhead tion from its origins as a primary hunting tool, migration to utiliza- arrow tip injuries in a controlled environment. -

The Spring-Mass Experiment As a Step from Oscillationsto Waves: Mass and Friction Issues and Their Approaches
The spring-mass experiment as a step from oscillationsto waves: mass and friction issues and their approaches I. Boscolo1, R. Loewenstein2 1Physics Department, Milano University, via Celoria 16, 20133, Italy. 2Istituto Torno, Piazzale Don Milani 1, 20022 Castano Primo Milano, Italy. E-mail: [email protected] (Received 12 February 2011, accepted 29 June 2011) Abstract The spring-mass experiment is a step in a sequence of six increasingly complex practicals from oscillations to waves in which we cover the first year laboratory program. Both free and forced oscillations are investigated. The spring-mass is subsequently loaded with a disk to introduce friction. The succession of steps is: determination of the spring constant both by Hooke’s law and frequency-mass oscillation law, damping time measurement, resonance and phase curve plots. All cross checks among quantities and laws are done applying compatibility rules. The non negligible mass of the spring and the peculiar physical and teaching problems introduced by friction are discussed. The intriguing waveforms generated in the motions are analyzed. We outline the procedures used through the experiment to improve students' ability to handle equipment, to choose apparatus appropriately, to put theory into action critically and to practice treating data with statistical methods. Keywords: Theory-practicals in Spring-Mass Education Experiment, Friction and Resonance, Waveforms. Resumen El experimento resorte-masa es un paso en una secuencia de seis prácticas cada vez más complejas de oscilaciones a ondas en el que cubrimos el programa del primer año del laboratorio. Ambas oscilaciones libres y forzadas son investigadas. El resorte-masa se carga posteriormente con un disco para introducir la fricción. -

Bath Time Travellers Weaving
Bath Time Travellers Weaving Did you know? The Romans used wool, linen, cotton and sometimes silk for their clothing. Before the use of spinning wheels, spinning was carried out using a spindle and a whorl. The spindle or rod usually had a bump on which the whorl was fitted. The majority of the whorls were made of stone, lead or recycled pots. A wisp of prepared wool was twisted around the spindle, which was then spun and allowed to drop. The whorl acts to keep the spindle twisting and the weight stretches the fibres. By doing this, the fibres were extended and twisted into yarn. Weaving was probably invented much later than spinning around 6000 BC in West Asia. By Roman times weaving was usually done on upright looms. None of these have survived but fortunately we have pictures drawn at the time to show us what they looked like. A weaver who stood at a vertical loom could weave cloth of a greater width than was possible sitting down. This was important as a full sized toga could measure as much as 4-5 metres in length and 2.5 metres wide! Once the cloth had been produced it was soaked in decayed urine to remove the grease and make it ready for dying. Dyes came from natural materials. Most dyes came from sources near to where the Romans settled. The colours you wore in Roman times told people about you. If you were rich you could get rarer dyes with brighter colours from overseas. Activity 1 – Weave an Owl Hanging Have a close look at the Temple pediment. -

What Is Hooke's Law? 16 February 2015, by Matt Williams
What is Hooke's Law? 16 February 2015, by Matt Williams Like so many other devices invented over the centuries, a basic understanding of the mechanics is required before it can so widely used. In terms of springs, this means understanding the laws of elasticity, torsion and force that come into play – which together are known as Hooke's Law. Hooke's Law is a principle of physics that states that the that the force needed to extend or compress a spring by some distance is proportional to that distance. The law is named after 17th century British physicist Robert Hooke, who sought to demonstrate the relationship between the forces applied to a spring and its elasticity. He first stated the law in 1660 as a Latin anagram, and then published the solution in 1678 as ut tensio, sic vis – which translated, means "as the extension, so the force" or "the extension is proportional to the force"). This can be expressed mathematically as F= -kX, where F is the force applied to the spring (either in the form of strain or stress); X is the displacement A historical reconstruction of what Robert Hooke looked of the spring, with a negative value demonstrating like, painted in 2004 by Rita Greer. Credit: that the displacement of the spring once it is Wikipedia/Rita Greer/FAL stretched; and k is the spring constant and details just how stiff it is. Hooke's law is the first classical example of an The spring is a marvel of human engineering and explanation of elasticity – which is the property of creativity.