UPPSALA UNIVERSITY Detection and Characterization of Transiting
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tidal Heating in Multilayered Terrestrial Exoplanets
The Astrophysical Journal, 789:30 (27pp), 2014 July 1 doi:10.1088/0004-637X/789/1/30 C 2014. The American Astronomical Society. All rights reserved. Printed in the U.S.A. TIDAL HEATING IN MULTILAYERED TERRESTRIAL EXOPLANETS Wade G. Henning1 and Terry Hurford NASA Goddard Space Flight Center, 8800 Greenbelt Road, Greenbelt, MD 20771, USA; [email protected] Received 2014 March 21; accepted 2014 May 7; published 2014 June 11 ABSTRACT The internal pattern and overall magnitude of tidal heating for spin-synchronous terrestrial exoplanets from 1 to 2.5 RE is investigated using a propagator matrix method for a variety of layer structures. Particular attention is paid to ice–silicate hybrid super-Earths, where a significant ice mantle is modeled to rest atop an iron-silicate core, and may or may not contain a liquid water ocean. We find multilayer modeling often increases tidal dissipation relative to a homogeneous model, across multiple orbital periods, due to the ability to include smaller volume low viscosity regions, and the added flexure allowed by liquid layers. Gradations in parameters with depth are explored, such as allowed by the Preliminary Earth Reference Model. For ice–silicate hybrid worlds, dramatically greater dissipation is possible beyond the case of a silicate mantle only, allowing non-negligible tidal activity to extend to greater orbital periods than previously predicted. Surface patterns of tidal heating are found to potentially be useful for distinguishing internal structure. The influence of ice mantle depth and water ocean size and position are shown for a range of forcing frequencies. -

An Extreme Planetary System Around HD 219828 One Long-Period Super Jupiter to a Hot-Neptune Host Star?,??
A&A 592, A13 (2016) Astronomy DOI: 10.1051/0004-6361/201628374 & c ESO 2016 Astrophysics An extreme planetary system around HD 219828 One long-period super Jupiter to a hot-Neptune host star?,?? N. C. Santos1; 2, A. Santerne1, J. P. Faria1; 2, J. Rey3, A. C. M. Correia4; 5, J. Laskar5, S. Udry3, V. Adibekyan1, F. Bouchy3; 6, E. Delgado-Mena1, C. Melo7, X. Dumusque3, G. Hébrard8; 9, C. Lovis3, M. Mayor3, M. Montalto1, A. Mortier10, F. Pepe3, P. Figueira1, J. Sahlmann11, D. Ségransan3, and S. G. Sousa1 1 Instituto de Astrofísica e Ciências do Espaço, Universidade do Porto, CAUP, Rua das Estrelas, 4150-762 Porto, Portugal e-mail: [email protected] 2 Departamento de Física e Astronomia, Faculdade de Ciências, Universidade do Porto, Rua do Campo Alegre, 4169-007 Porto, Portugal 3 Observatoire de Genève, Université de Genève, 51 ch. des Maillettes, 1290 Sauverny, Switzerland 4 CIDMA, Departamento de Física, Universidade de Aveiro, Campus de Santiago, 3810-193 Aveiro, Portugal 5 ASD, IMCCE-CNRS UMR 8028, Observatoire de Paris, PSL Research University, 77 Av. Denfert-Rochereau, 75014 Paris, France 6 Aix-Marseille Université, CNRS, Laboratoire d’Astrophysique de Marseille UMR 7326, 13388 Marseille Cedex 13, France 7 European Southern Observatory (ESO), 19001 Casilla, Santiago, Chile 8 Observatoire de Haute-Provence, CNRS/OAMP, 04870 Saint-Michel-l’Observatoire, France 9 Institut d’Astrophysique de Paris, UMR 7095 CNRS, Université Pierre & Marie Curie, 98bis boulevard Arago, 75014 Paris, France 10 SUPA, School of Physics and Astronomy, University of St. Andrews, St. Andrews, KY16 9SS, UK 11 European Space Agency (ESA), Space Telescope Science Institute, 3700 San Martin Drive, Baltimore, MD 21218, USA Received 24 February 2016 / Accepted 10 May 2016 ABSTRACT Context. -

Naming the Extrasolar Planets
Naming the extrasolar planets W. Lyra Max Planck Institute for Astronomy, K¨onigstuhl 17, 69177, Heidelberg, Germany [email protected] Abstract and OGLE-TR-182 b, which does not help educators convey the message that these planets are quite similar to Jupiter. Extrasolar planets are not named and are referred to only In stark contrast, the sentence“planet Apollo is a gas giant by their assigned scientific designation. The reason given like Jupiter” is heavily - yet invisibly - coated with Coper- by the IAU to not name the planets is that it is consid- nicanism. ered impractical as planets are expected to be common. I One reason given by the IAU for not considering naming advance some reasons as to why this logic is flawed, and sug- the extrasolar planets is that it is a task deemed impractical. gest names for the 403 extrasolar planet candidates known One source is quoted as having said “if planets are found to as of Oct 2009. The names follow a scheme of association occur very frequently in the Universe, a system of individual with the constellation that the host star pertains to, and names for planets might well rapidly be found equally im- therefore are mostly drawn from Roman-Greek mythology. practicable as it is for stars, as planet discoveries progress.” Other mythologies may also be used given that a suitable 1. This leads to a second argument. It is indeed impractical association is established. to name all stars. But some stars are named nonetheless. In fact, all other classes of astronomical bodies are named. -
![Arxiv:2105.11583V2 [Astro-Ph.EP] 2 Jul 2021 Keck-HIRES, APF-Levy, and Lick-Hamilton Spectrographs](https://docslib.b-cdn.net/cover/4203/arxiv-2105-11583v2-astro-ph-ep-2-jul-2021-keck-hires-apf-levy-and-lick-hamilton-spectrographs-364203.webp)
Arxiv:2105.11583V2 [Astro-Ph.EP] 2 Jul 2021 Keck-HIRES, APF-Levy, and Lick-Hamilton Spectrographs
Draft version July 6, 2021 Typeset using LATEX twocolumn style in AASTeX63 The California Legacy Survey I. A Catalog of 178 Planets from Precision Radial Velocity Monitoring of 719 Nearby Stars over Three Decades Lee J. Rosenthal,1 Benjamin J. Fulton,1, 2 Lea A. Hirsch,3 Howard T. Isaacson,4 Andrew W. Howard,1 Cayla M. Dedrick,5, 6 Ilya A. Sherstyuk,1 Sarah C. Blunt,1, 7 Erik A. Petigura,8 Heather A. Knutson,9 Aida Behmard,9, 7 Ashley Chontos,10, 7 Justin R. Crepp,11 Ian J. M. Crossfield,12 Paul A. Dalba,13, 14 Debra A. Fischer,15 Gregory W. Henry,16 Stephen R. Kane,13 Molly Kosiarek,17, 7 Geoffrey W. Marcy,1, 7 Ryan A. Rubenzahl,1, 7 Lauren M. Weiss,10 and Jason T. Wright18, 19, 20 1Cahill Center for Astronomy & Astrophysics, California Institute of Technology, Pasadena, CA 91125, USA 2IPAC-NASA Exoplanet Science Institute, Pasadena, CA 91125, USA 3Kavli Institute for Particle Astrophysics and Cosmology, Stanford University, Stanford, CA 94305, USA 4Department of Astronomy, University of California Berkeley, Berkeley, CA 94720, USA 5Cahill Center for Astronomy & Astrophysics, California Institute of Technology, Pasadena, CA 91125, USA 6Department of Astronomy & Astrophysics, The Pennsylvania State University, 525 Davey Lab, University Park, PA 16802, USA 7NSF Graduate Research Fellow 8Department of Physics & Astronomy, University of California Los Angeles, Los Angeles, CA 90095, USA 9Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, CA 91125, USA 10Institute for Astronomy, University of Hawai`i, -

Geodynamics and Rate of Volcanism on Massive Earth-Like Planets
The Astrophysical Journal, 700:1732–1749, 2009 August 1 doi:10.1088/0004-637X/700/2/1732 C 2009. The American Astronomical Society. All rights reserved. Printed in the U.S.A. GEODYNAMICS AND RATE OF VOLCANISM ON MASSIVE EARTH-LIKE PLANETS E. S. Kite1,3, M. Manga1,3, and E. Gaidos2 1 Department of Earth and Planetary Science, University of California at Berkeley, Berkeley, CA 94720, USA; [email protected] 2 Department of Geology and Geophysics, University of Hawaii at Manoa, Honolulu, HI 96822, USA Received 2008 September 12; accepted 2009 May 29; published 2009 July 16 ABSTRACT We provide estimates of volcanism versus time for planets with Earth-like composition and masses 0.25–25 M⊕, as a step toward predicting atmospheric mass on extrasolar rocky planets. Volcanism requires melting of the silicate mantle. We use a thermal evolution model, calibrated against Earth, in combination with standard melting models, to explore the dependence of convection-driven decompression mantle melting on planet mass. We show that (1) volcanism is likely to proceed on massive planets with plate tectonics over the main-sequence lifetime of the parent star; (2) crustal thickness (and melting rate normalized to planet mass) is weakly dependent on planet mass; (3) stagnant lid planets live fast (they have higher rates of melting than their plate tectonic counterparts early in their thermal evolution), but die young (melting shuts down after a few Gyr); (4) plate tectonics may not operate on high-mass planets because of the production of buoyant crust which is difficult to subduct; and (5) melting is necessary but insufficient for efficient volcanic degassing—volatiles partition into the earliest, deepest melts, which may be denser than the residue and sink to the base of the mantle on young, massive planets. -
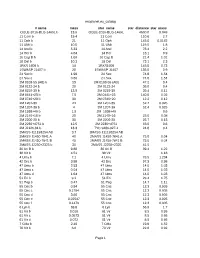
Exoplanet.Eu Catalog Page 1 # Name Mass Star Name
exoplanet.eu_catalog # name mass star_name star_distance star_mass OGLE-2016-BLG-1469L b 13.6 OGLE-2016-BLG-1469L 4500.0 0.048 11 Com b 19.4 11 Com 110.6 2.7 11 Oph b 21 11 Oph 145.0 0.0162 11 UMi b 10.5 11 UMi 119.5 1.8 14 And b 5.33 14 And 76.4 2.2 14 Her b 4.64 14 Her 18.1 0.9 16 Cyg B b 1.68 16 Cyg B 21.4 1.01 18 Del b 10.3 18 Del 73.1 2.3 1RXS 1609 b 14 1RXS1609 145.0 0.73 1SWASP J1407 b 20 1SWASP J1407 133.0 0.9 24 Sex b 1.99 24 Sex 74.8 1.54 24 Sex c 0.86 24 Sex 74.8 1.54 2M 0103-55 (AB) b 13 2M 0103-55 (AB) 47.2 0.4 2M 0122-24 b 20 2M 0122-24 36.0 0.4 2M 0219-39 b 13.9 2M 0219-39 39.4 0.11 2M 0441+23 b 7.5 2M 0441+23 140.0 0.02 2M 0746+20 b 30 2M 0746+20 12.2 0.12 2M 1207-39 24 2M 1207-39 52.4 0.025 2M 1207-39 b 4 2M 1207-39 52.4 0.025 2M 1938+46 b 1.9 2M 1938+46 0.6 2M 2140+16 b 20 2M 2140+16 25.0 0.08 2M 2206-20 b 30 2M 2206-20 26.7 0.13 2M 2236+4751 b 12.5 2M 2236+4751 63.0 0.6 2M J2126-81 b 13.3 TYC 9486-927-1 24.8 0.4 2MASS J11193254 AB 3.7 2MASS J11193254 AB 2MASS J1450-7841 A 40 2MASS J1450-7841 A 75.0 0.04 2MASS J1450-7841 B 40 2MASS J1450-7841 B 75.0 0.04 2MASS J2250+2325 b 30 2MASS J2250+2325 41.5 30 Ari B b 9.88 30 Ari B 39.4 1.22 38 Vir b 4.51 38 Vir 1.18 4 Uma b 7.1 4 Uma 78.5 1.234 42 Dra b 3.88 42 Dra 97.3 0.98 47 Uma b 2.53 47 Uma 14.0 1.03 47 Uma c 0.54 47 Uma 14.0 1.03 47 Uma d 1.64 47 Uma 14.0 1.03 51 Eri b 9.1 51 Eri 29.4 1.75 51 Peg b 0.47 51 Peg 14.7 1.11 55 Cnc b 0.84 55 Cnc 12.3 0.905 55 Cnc c 0.1784 55 Cnc 12.3 0.905 55 Cnc d 3.86 55 Cnc 12.3 0.905 55 Cnc e 0.02547 55 Cnc 12.3 0.905 55 Cnc f 0.1479 55 -

Ghost Imaging of Space Objects
Ghost Imaging of Space Objects Dmitry V. Strekalov, Baris I. Erkmen, Igor Kulikov, and Nan Yu Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Drive, Pasadena, California 91109-8099 USA NIAC Final Report September 2014 Contents I. The proposed research 1 A. Origins and motivation of this research 1 B. Proposed approach in a nutshell 3 C. Proposed approach in the context of modern astronomy 7 D. Perceived benefits and perspectives 12 II. Phase I goals and accomplishments 18 A. Introducing the theoretical model 19 B. A Gaussian absorber 28 C. Unbalanced arms configuration 32 D. Phase I summary 34 III. Phase II goals and accomplishments 37 A. Advanced theoretical analysis 38 B. On observability of a shadow gradient 47 C. Signal-to-noise ratio 49 D. From detection to imaging 59 E. Experimental demonstration 72 F. On observation of phase objects 86 IV. Dissemination and outreach 90 V. Conclusion 92 References 95 1 I. THE PROPOSED RESEARCH The NIAC Ghost Imaging of Space Objects research program has been carried out at the Jet Propulsion Laboratory, Caltech. The program consisted of Phase I (October 2011 to September 2012) and Phase II (October 2012 to September 2014). The research team consisted of Drs. Dmitry Strekalov (PI), Baris Erkmen, Igor Kulikov and Nan Yu. The team members acknowledge stimulating discussions with Drs. Leonidas Moustakas, Andrew Shapiro-Scharlotta, Victor Vilnrotter, Michael Werner and Paul Goldsmith of JPL; Maria Chekhova and Timur Iskhakov of Max Plank Institute for Physics of Light, Erlangen; Paul Nu˜nez of Coll`ege de France & Observatoire de la Cˆote d’Azur; and technical support from Victor White and Pierre Echternach of JPL. -

The Spitzer Search for the Transits of HARPS Low-Mass Planets II
A&A 601, A117 (2017) Astronomy DOI: 10.1051/0004-6361/201629270 & c ESO 2017 Astrophysics The Spitzer search for the transits of HARPS low-mass planets II. Null results for 19 planets? M. Gillon1, B.-O. Demory2; 3, C. Lovis4, D. Deming5, D. Ehrenreich4, G. Lo Curto6, M. Mayor4, F. Pepe4, D. Queloz3; 4, S. Seager7, D. Ségransan4, and S. Udry4 1 Space sciences, Technologies and Astrophysics Research (STAR) Institute, Université de Liège, Allée du 6 Août 17, Bat. B5C, 4000 Liège, Belgium e-mail: [email protected] 2 University of Bern, Center for Space and Habitability, Sidlerstrasse 5, 3012 Bern, Switzerland 3 Cavendish Laboratory, J. J. Thomson Avenue, Cambridge CB3 0HE, UK 4 Observatoire de Genève, Université de Genève, 51 Chemin des Maillettes, 1290 Sauverny, Switzerland 5 Department of Astronomy, University of Maryland, College Park, MD 20742-2421, USA 6 European Southern Observatory, Karl-Schwarzschild-Str. 2, 85478 Garching bei München, Germany 7 Department of Earth, Atmospheric and Planetary Sciences, Department of Physics, Massachusetts Institute of Technology, 77 Massachusetts Ave., Cambridge, MA 02139, USA Received 8 July 2016 / Accepted 15 December 2016 ABSTRACT Short-period super-Earths and Neptunes are now known to be very frequent around solar-type stars. Improving our understanding of these mysterious planets requires the detection of a significant sample of objects suitable for detailed characterization. Searching for the transits of the low-mass planets detected by Doppler surveys is a straightforward way to achieve this goal. Indeed, Doppler surveys target the most nearby main-sequence stars, they regularly detect close-in low-mass planets with significant transit probability, and their radial velocity data constrain strongly the ephemeris of possible transits. -

Mètodes De Detecció I Anàlisi D'exoplanetes
MÈTODES DE DETECCIÓ I ANÀLISI D’EXOPLANETES Rubén Soussé Villa 2n de Batxillerat Tutora: Dolors Romero IES XXV Olimpíada 13/1/2011 Mètodes de detecció i anàlisi d’exoplanetes . Índex - Introducció ............................................................................................. 5 [ Marc Teòric ] 1. L’Univers ............................................................................................... 6 1.1 Les estrelles .................................................................................. 6 1.1.1 Vida de les estrelles .............................................................. 7 1.1.2 Classes espectrals .................................................................9 1.1.3 Magnitud ........................................................................... 9 1.2 Sistemes planetaris: El Sistema Solar .............................................. 10 1.2.1 Formació ......................................................................... 11 1.2.2 Planetes .......................................................................... 13 2. Planetes extrasolars ............................................................................ 19 2.1 Denominació .............................................................................. 19 2.2 Història dels exoplanetes .............................................................. 20 2.3 Mètodes per detectar-los i saber-ne les característiques ..................... 26 2.3.1 Oscil·lació Doppler ........................................................... 27 2.3.2 Trànsits -

A New Neptune-Mass Planet Orbiting HD 219828 Radial-Velocity of the Star Was an Average of Only About 15 Table 1
Astronomy & Astrophysics manuscript no. 6845 c ESO 2018 May 9, 2018 A new Neptune-mass planet orbiting HD 219828⋆ C. Melo1, N. C. Santos2,3,4, W. Gieren5, G. Pietrzynski5, M. T. Ruiz6, S. G. Sousa2,7,8, F. Bouchy9, C. Lovis3, M. Mayor3, F. Pepe3, D. Queloz3, R. da Silva3, and S. Udry3 1 European Southern Observatory, Casilla 19001, Santiago 19, Chile 2 Centro de Astronomia e Astrof´ısica da Universidade de Lisboa, Observat´orio Astron´omico de Lisboa, Tapada da Ajuda, 1349-018 Lisboa, Portugal 3 Observatoire de Gen`eve, 51 ch. des Maillettes, CH–1290 Sauverny, Switzerland 4 Centro de Geofisica de Evora,´ Rua Rom˜ao Ramalho 59, 7002-554 Evora,´ Portugal 5 Universidad de Concepcion, Departamento de Fisica, Casilla 160-C, Concepcion, Chile 6 Departamento de Astronomia, Universidad de Chile, Casilla Postal 36D, Santiago, Chile 7 Centro de Astrof´ısica da Universidade do Porto, Rua das Estrelas, 4150-762 Porto, Portugal 8 Departamento de Matem´atica Aplicada, Faculdade de Ciˆencias da Universidade do Porto, Portugal 9 Institut d’Astrophysique de Paris, 98bis Bd. Arago, 75014 Paris, France Received XXX; accepted XXX ABSTRACT Two years ago a new benchmark for the planetary survey was set with the discoveries of three extrasolar planets with masses below 20M⊕. In particular, the serendipitous discovery of the 14M⊕ planet around µ Ara found with HARPS with a semi-amplitude of only 4 m s−1 put in evidence the tremendous potential of HARPS for the search of this class of very low-mass planets. Aiming to discovering new worlds similar to µ Ara b, we carried out an intensive campaign with HARPS to observe a selected sample of northern stars covering a range of metallicity from about solar to twice solar. -

Exoplanet.Eu Catalog Page 1 Star Distance Star Name Star Mass
exoplanet.eu_catalog star_distance star_name star_mass Planet name mass 1.3 Proxima Centauri 0.120 Proxima Cen b 0.004 1.3 alpha Cen B 0.934 alf Cen B b 0.004 2.3 WISE 0855-0714 WISE 0855-0714 6.000 2.6 Lalande 21185 0.460 Lalande 21185 b 0.012 3.2 eps Eridani 0.830 eps Eridani b 3.090 3.4 Ross 128 0.168 Ross 128 b 0.004 3.6 GJ 15 A 0.375 GJ 15 A b 0.017 3.6 YZ Cet 0.130 YZ Cet d 0.004 3.6 YZ Cet 0.130 YZ Cet c 0.003 3.6 YZ Cet 0.130 YZ Cet b 0.002 3.6 eps Ind A 0.762 eps Ind A b 2.710 3.7 tau Cet 0.783 tau Cet e 0.012 3.7 tau Cet 0.783 tau Cet f 0.012 3.7 tau Cet 0.783 tau Cet h 0.006 3.7 tau Cet 0.783 tau Cet g 0.006 3.8 GJ 273 0.290 GJ 273 b 0.009 3.8 GJ 273 0.290 GJ 273 c 0.004 3.9 Kapteyn's 0.281 Kapteyn's c 0.022 3.9 Kapteyn's 0.281 Kapteyn's b 0.015 4.3 Wolf 1061 0.250 Wolf 1061 d 0.024 4.3 Wolf 1061 0.250 Wolf 1061 c 0.011 4.3 Wolf 1061 0.250 Wolf 1061 b 0.006 4.5 GJ 687 0.413 GJ 687 b 0.058 4.5 GJ 674 0.350 GJ 674 b 0.040 4.7 GJ 876 0.334 GJ 876 b 1.938 4.7 GJ 876 0.334 GJ 876 c 0.856 4.7 GJ 876 0.334 GJ 876 e 0.045 4.7 GJ 876 0.334 GJ 876 d 0.022 4.9 GJ 832 0.450 GJ 832 b 0.689 4.9 GJ 832 0.450 GJ 832 c 0.016 5.9 GJ 570 ABC 0.802 GJ 570 D 42.500 6.0 SIMP0136+0933 SIMP0136+0933 12.700 6.1 HD 20794 0.813 HD 20794 e 0.015 6.1 HD 20794 0.813 HD 20794 d 0.011 6.1 HD 20794 0.813 HD 20794 b 0.009 6.2 GJ 581 0.310 GJ 581 b 0.050 6.2 GJ 581 0.310 GJ 581 c 0.017 6.2 GJ 581 0.310 GJ 581 e 0.006 6.5 GJ 625 0.300 GJ 625 b 0.010 6.6 HD 219134 HD 219134 h 0.280 6.6 HD 219134 HD 219134 e 0.200 6.6 HD 219134 HD 219134 d 0.067 6.6 HD 219134 HD -

Density Estimation for Projected Exoplanet Quantities
Density Estimation for Projected Exoplanet Quantities Robert A. Brown Space Telescope Science Institute, 3700 San Martin Drive, Baltimore, MD 21218 [email protected] ABSTRACT Exoplanet searches using radial velocity (RV) and microlensing (ML) produce samples of “projected” mass and orbital radius, respectively. We present a new method for estimating the probability density distribution (density) of the un- projected quantity from such samples. For a sample of n data values, the method involves solving n simultaneous linear equations to determine the weights of delta functions for the raw, unsmoothed density of the unprojected quantity that cause the associated cumulative distribution function (CDF) of the projected quantity to exactly reproduce the empirical CDF of the sample at the locations of the n data values. We smooth the raw density using nonparametric kernel density estimation with a normal kernel of bandwidth σ. We calibrate the dependence of σ on n by Monte Carlo experiments performed on samples drawn from a the- oretical density, in which the integrated square error is minimized. We scale this calibration to the ranges of real RV samples using the Normal Reference Rule. The resolution and amplitude accuracy of the estimated density improve with n. For typical RV and ML samples, we expect the fractional noise at the PDF peak to be approximately 80 n− log 2. For illustrations, we apply the new method to 67 RV values given a similar treatment by Jorissen et al. in 2001, and to the 308 RV values listed at exoplanets.org on 20 October 2010. In addition to an- alyzing observational results, our methods can be used to develop measurement arXiv:1011.3991v3 [astro-ph.IM] 21 Mar 2011 requirements—particularly on the minimum sample size n—for future programs, such as the microlensing survey of Earth-like exoplanets recommended by the Astro 2010 committee.