Download/Dnvgl-Rp-G107-Efficient-Updating-Of-Risk-Assessments (Accessed on 5 April 2021)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Regulatory Issues in International Martime Transport
Organisation de Coopération et de Développement Economiques Organisation for Economic Co-operation and Development __________________________________________________________________________________________ Or. Eng. DIRECTORATE FOR SCIENCE, TECHNOLOGY AND INDUSTRY DIVISION OF TRANSPORT REGULATORY ISSUES IN INTERNATIONAL MARTIME TRANSPORT Contact: Mr. Wolfgang Hübner, Head of the Division of Transport, DSTI, Tel: (33 1) 45 24 91 32 ; Fax: (33 1) 45 24 93 86 ; Internet: [email protected] Or. Eng. Or. Document complet disponible sur OLIS dans son format d’origine Complete document available on OLIS in its original format 1 Summary This report focuses on regulations governing international liner and bulk shipping. Both modes are closely linked to international trade, deriving from it their growth. Also, as a service industry to trade international shipping, which is by far the main mode of international transport of goods, has facilitated international trade and has contributed to its expansion. Total seaborne trade volume was estimated by UNCTAD to have reached 5330 million metric tons in 2000. The report discusses the web of regulatory measures that surround these two segments of the shipping industry, and which have a considerable impact on its performance. As well as reviewing administrative regulations to judge whether they meet their intended objectives efficiently and effectively, the report examines all those aspects of economic regulations that restrict entry, exit, pricing and normal commercial practices, including different forms of business organisation. However, those regulatory elements that cover competition policy as applied to liner shipping will be dealt with in a separate study to be undertaken by the OECD Secretariat Many measures that apply to maritime transport services are not part of a regulatory framework but constitute commercial practices of market operators. -

Seacare Authority Exemption
EXEMPTION 1—SCHEDULE 1 Official IMO Year of Ship Name Length Type Number Number Completion 1 GIANT LEAP 861091 13.30 2013 Yacht 1209 856291 35.11 1996 Barge 2 DREAM 860926 11.97 2007 Catamaran 2 ITCHY FEET 862427 12.58 2019 Catamaran 2 LITTLE MISSES 862893 11.55 2000 857725 30.75 1988 Passenger vessel 2001 852712 8702783 30.45 1986 Ferry 2ABREAST 859329 10.00 1990 Catamaran Pleasure Yacht 2GETHER II 859399 13.10 2008 Catamaran Pleasure Yacht 2-KAN 853537 16.10 1989 Launch 2ND HOME 856480 10.90 1996 Launch 2XS 859949 14.25 2002 Catamaran 34 SOUTH 857212 24.33 2002 Fishing 35 TONNER 861075 9714135 32.50 2014 Barge 38 SOUTH 861432 11.55 1999 Catamaran 55 NORD 860974 14.24 1990 Pleasure craft 79 199188 9.54 1935 Yacht 82 YACHT 860131 26.00 2004 Motor Yacht 83 862656 52.50 1999 Work Boat 84 862655 52.50 2000 Work Boat A BIT OF ATTITUDE 859982 16.20 2010 Yacht A COCONUT 862582 13.10 1988 Yacht A L ROBB 859526 23.95 2010 Ferry A MORNING SONG 862292 13.09 2003 Pleasure craft A P RECOVERY 857439 51.50 1977 Crane/derrick barge A QUOLL 856542 11.00 1998 Yacht A ROOM WITH A VIEW 855032 16.02 1994 Pleasure A SOJOURN 861968 15.32 2008 Pleasure craft A VOS SANTE 858856 13.00 2003 Catamaran Pleasure Yacht A Y BALAMARA 343939 9.91 1969 Yacht A.L.S.T. JAMAEKA PEARL 854831 15.24 1972 Yacht A.M.S. 1808 862294 54.86 2018 Barge A.M.S. -
Integrated Method for Optimal Channel Dredging Design 5
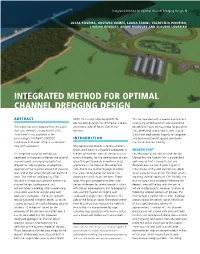
Integrated Method for Optimal Channel Dredging Design 5 LUCAS SILVEIRA, GUSTAVO GOMES, LUANA TAIANI, VALDECÍLIO PINHEIRO, LINDINO BENEDET, ANDRE MARQUES AND CLAUDIO LOUREIRO INTEGRATED METHOD FOR OPTIMAL CHANNEL DREDGING DESIGN ABSTRACT OPEX. This in turn helps to identify the This configuration of the coastal environment optimal configuration for commercial interests favours the amplification of tidal astronomic This article has been adapted from the paper and internal rate of return (IRR) of the constituents inside the bays (tidal ranges up to that won the IADC Young Author 2016 terminal. 7m), generating strong tidal currents (up to Award and it was published in the 3 m/s) that pose serious hazards to navigation proceedings of IX PIANC-COPEDEC INTRODUCTION and force migration of seabed sand banks conference in October 2016. It is reprinted that cause channel shoaling. here with permission. The logistical constraints in central-southern Brazil and increasing agriculture production in MEARIM PORT An integrated analytical method was the central-northern areas of the country has Located about 45km inland inside the São developed and applied to identify the optimal given an impetus for the development of new Marcos Bay, the Mearim Port is a greenfield channel layout and dredging depth that greenfield port terminals in northern Brazil, port concept that is being studied and allowed for safe navigation; enabled the specifically in the states of Maranhão and designed over the past 8 years (Figure 1). operation of the required amount of ships per Pará. This is due to their strategic locations Initial studies of the port considered a 48km year; and at the same time reduced dredging that allow for cost-effective solutions to long navigation channel for 15m draft vessels, costs. -

BULK CARRIERS: Design, Operation, and Maintenance Concerns for Structural Safety of Bulk Carriers
Member Agencies: Address Correspondence to: American Bureau of Shipping Executive Director Defence Research and Development Ship Structure Committee Canada U.S. Coast Guard (CG-5212/SSC) Maritime Administration 2100 Second Street, SW Military Sealift Command Washington, D.C. 20593-0001 Naval Sea Systems Command Website: Society of Naval Architects & Marine http://www.shipstructure.org Engineers Transport Canada United States Coast Guard Ship Structure Committee Case Study This case study has been prepared by the Ship Structure Committee (SSC) as an educational tool to advance the study of ship structures. The SSC is a maritime industry and allied agency partnership that supports, the active pursuit of research and development to identify gaps in knowledge for marine structures. The Committee was formed in 1943 to study Liberty Ship structural failures and now is comprised of 8 Principal Member Agencies. The Committee has established itself as a world recognized leader in marine structures with hundreds of technical reports, a global membership of over 900 volunteer subject matter experts, and a dynamic website to disseminate past, current, and future work of the Committee. We encourage you to review other case studies, reports, and material on ship structures available to the public online at www.shipistructure.org. BULK CARRIERS: Design, Operation, and Maintenance Concerns for Structural Safety of Bulk Carriers Date: Summary: The number and magnitude of bulk carrier accidents in the 1970s and 1980s gave rise to new consciousness, research and regulation of their design and operation. Unfortunately, this has not paid off in terms of either prevention of accidents or mitigation of damage to either life or property. -
Basic Concepts of Maritime Transport and Its Present Status in Latin America and the Caribbean
or. iH"&b BASIC CONCEPTS OF MARITIME TRANSPORT AND ITS PRESENT STATUS IN LATIN AMERICA AND THE CARIBBEAN . ' ftp • ' . J§ WAC 'At 'li ''UWD te. , • • ^ > o UNITED NATIONS 1 fc r> » t 4 CR 15 n I" ti i CUADERNOS DE LA CEP AL BASIC CONCEPTS OF MARITIME TRANSPORT AND ITS PRESENT STATUS IN LATIN AMERICA AND THE CARIBBEAN ECONOMIC COMMISSION FOR LATIN AMERICA AND THE CARIBBEAN UNITED NATIONS Santiago, Chile, 1987 LC/G.1426 September 1987 This study was prepared by Mr Tnmas Sepûlveda Whittle. Consultant to ECLAC's Transport and Communications Division. The opinions expressed here are the sole responsibility of the author, and do not necessarily coincide with those of the United Nations. Translated in Canada for official use by the Multilingual Translation Directorate, Trans- lation Bureau, Ottawa, from the Spanish original Los conceptos básicos del transporte marítimo y la situación de la actividad en América Latina. The English text was subse- quently revised and has been extensively updated to reflect the most recent statistics available. UNITED NATIONS PUBLICATIONS Sales No. E.86.II.G.11 ISSN 0252-2195 ISBN 92-1-121137-9 * « CONTENTS Page Summary 7 1. The importance of transport 10 2. The predominance of maritime transport 13 3. Factors affecting the shipping business 14 4. Ships 17 5. Cargo 24 6. Ports 26 7. Composition of the shipping industry 29 8. Shipping conferences 37 9. The Code of Conduct for Liner Conferences 40 10. The Consultation System 46 * 11. Conference freight rates 49 12. Transport conditions 54 13. Marine insurance 56 V 14. -

Annex 1: Problem Definition and Background Information
FSA STUDY ON BULK CARRIER SAFETY CONDUCTED BY JAPAN MSC75/5/2 ANNEX 1 Page 1 ANNEX 1: PROBLEM DEFINITION AND BACKGROUND INFORMATION 1. Definition of the problem 1.1 Definition of the problem SOLAS Chapter XII requires safety measures to those bulk carries of length of 150 m and over and which carry high-density bulk cargo. The Committee is discussing questions whether safety measures are necessary for bulk carriers to which Chapter XII does not apply. This FSA study is intended to give assistance, by FSA methodology, for verifying and analyzing the safety of bulk carriers to which Chapter XII does not apply. For this purpose, this evaluation needs to compare the safety of various types of bulk carriers that comply with SOLAS Chapter XII or does not comply with that. 1.1.1 Ship category 1.1.1.1 Definition of Bulk Carriers There are several definitions of bulk carriers. These are: .1 A definition of bulk carriers is given in SOLAS Chapter IX; that is, “Bulk Carrier means a ship which is constructed generally with single deck, topside tanks and hopper side tanks in cargo spaces, and it intended primarily to carry dry cargo in bulk, and includes such types as ore carriers and combination carriers. “ .2 Another definition has been developed during the SOLAS Conference and is given in the Conference Resolution 6; that is, “Ships constructed with single deck, topside tanks and hopper side tanks in cargo spaces and intended primarily to carry dry cargo in bulk; or ore carriers; or combination carriers” .3 The other definition has been proposed by MSC 70/4/Add.1 which has proposed FSA study on bulk carriers; that is, “A bulk carrier is any ship designed, constructed and/or used for the carriage of solid bulk cargo.” For the purpose of this study as mentioned in 2.1.2, a wider definition should be used. -
Breakaway of Bulk Carrier Privocean and Subsequent Collision with Tanker Bravo and Tugboat Texas
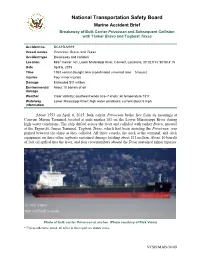
National Transportation Safety Board Marine Accident Brief Breakaway of Bulk Carrier Privocean and Subsequent Collision with Tanker Bravo and Tugboat Texas Accident no. DCA15LM019 Vessel names Privocean, Bravo, and Texas Accident type Breakaway and collision Location Mile* marker 161, Lower Mississippi River, Convent, Louisiana; 30°02.5’ N, 90°50.4’ W Date April 6, 2015 Time 1553 central daylight time (coordinated universal time – 5 hours) Injuries Four minor injuries Damage Estimated $11 million Environmental About 10 barrels of oil damage Weather Clear visibility; southeast winds at 6–7 knots; air temperature 73°F Waterway Lower Mississippi River; high water conditions; current about 5 mph information About 1553 on April 6, 2015, bulk carrier Privocean broke free from its moorings at Convent Marine Terminal, located at mile marker 161 on the Lower Mississippi River during high water conditions. The ship drifted across the river and collided with tanker Bravo, moored at the Ergon-St. James Terminal. Tugboat Texas, which had been assisting the Privocean, was pinned between the ships as they collided. All three vessels, the dock at the terminal, and deck equipment on three other tugboats sustained damage totaling about $11 million. About 10 barrels of fuel oil spilled into the river, and four crewmembers aboard the Texas sustained minor injuries. Photo of bulk carrier Privocean at anchor. (Photo courtesy of Rick Voice) * Unless otherwise noted, all miles in this report are statute miles. NTSB/MAB-16/08 Breakaway of Bulk Carrier Privocean and Subsequent Collision with Tanker Bravo and Tugboat Texas Accident Events On April 4, 2015, 2 days before the accident, the Privocean departed Belmont Anchorage at mile marker 153.5 where its cargo holds had been cleaned in preparation for loading coal at the Convent Marine Terminal. -

Extreme Waves and Ship Design
10th International Symposium on Practical Design of Ships and Other Floating Structures Houston, Texas, United States of America © 2007 American Bureau of Shipping Extreme Waves and Ship Design Craig B. Smith Dockside Consultants, Inc. Balboa, California, USA Abstract Introduction Recent research has demonstrated that extreme waves, Recent research by the European Community has waves with crest to trough heights of 20 to 30 meters, demonstrated that extreme waves—waves with crest to occur more frequently than previously thought. Also, trough heights of 20 to 30 meters—occur more over the past several decades, a surprising number of frequently than previously thought (MaxWave Project, large commercial vessels have been lost in incidents 2003). In addition, over the past several decades, a involving extreme waves. Many of the victims were surprising number of large commercial vessels have bulk carriers. Current design criteria generally consider been lost in incidents involving extreme waves. Many significant wave heights less than 11 meters (36 feet). of the victims were bulk carriers that broke up so Based on what is known today, this criterion is quickly that they sank before a distress message could inadequate and consideration should be given to be sent or the crew could be rescued. designing for significant wave heights of 20 meters (65 feet), meanwhile recognizing that waves 30 meters (98 There also have been a number of widely publicized feet) high are not out of the question. The dynamic force events where passenger liners encountered large waves of wave impacts should also be included in the (20 meters or higher) that caused damage, injured structural analysis of the vessel, hatch covers and other passengers and crew members, but did not lead to loss vulnerable areas (as opposed to relying on static or of the vessel. -

ANNEX 3 Historical Data Analysis
FSA STUDY ON BULK CARRIER SAFETY CONDUCTED BY JAPAN MSC75/5/2 ANNEX 3 Page 1 ANNEX 3 Historical Data Analysis 1 Scope of Historical Data Analysis The scope of the study is to deal with safety bulk carriers. Its scope should be as wide as possible because FSA is a holistic approach in nature but it should be limited in order to pursue efficiency of the study. Therefore, accidents particular to bulk carriers should be considered. So accidents of bulk carriers have been classified into two categories: a) Casualties to be dealt with, because there are particular to bulk carriers, and b) Casualties not to be dealt with, because there are not particular to bulk carriers. Table 1.1 shows the results of categorization. Table 1.1 Categorization of Casualties a) Casualties to be dealt with in this study b) Casualties not to be dealt with in this study • Fire and explosion in cargo hold and fore end • Personnel accident spaces • Fire and explosion in machinery and • Flooded accommodation spaces • List and capsize • Collision and contact • Founder • Ground and strand • Damage and breakdown of construction and facilities in cargo holds and fore end spaces 2. High Level Historical Data Investigation At first, number of casualties on bulk carriers is analyzed from LMIS casualty database (1975-1996) by National Maritime Research Institute of Japan. The results are summarized in Table 2.1, Table 2.2, Table 2.3 and Table 2.4. Table 2.1 Casualty statistics of ships other than passenger ships Number of casualties Number of loss and/or missing lives Category Number (%) Number No. -
Bulk Carrier Casualty Report
Bulk Carrier Casualty Report Years 2009 to 2018 and trends INTERNATIONAL ASSOCIATION OF DRY CARGO SHIPOWNERS Ninth Floor, St. Clare House, 30/33 Minories, London EC3N 1DD Phone: +44 (0)20 7977 7030 E‐mail: [email protected] Web Site: www.intercargo.org While this report has been developed using the best information currently available, it is intended purely as guidance and is to be used at the user's own risk. No responsibility is accepted by INTERCARGO or by any person, firm, corporation or organisation who or which has been in any way concerned with the furnishing of information or data, the compilation, publication or authorised translation, supply or the sale of this report, for the accuracy of any information or advice given herein or for any omission here from or for any consequences whatsoever resulting directly or indirectly from compliance with or adoption of guidance contained herein. © INTERCARGO 2019 Contents Introduction………………………………………………… 1 Summary………………………………………………….... 2 Analysis of total losses for previous ten years 2009 to 2018 Losses by cause………………………………………... 4 Losses by bulk carrier size…………………………….. 5 Losses by age………………………………………….. 5 Losses by dwt………………………………………….. 6 Losses by average age…………………………………. 6 Loss of life……………………………………………... 7 Flag State performance………………………………… 7 Casualty list …………………………………………… 8 Alphabetical list ……………………………………..… 14 Introduction to INTERCARGO……………………back cover Front cover: Liquefied nickel ore (Image courtesy of MTD) Introduction Although there has been no reported loss of a Lessons learnt from past incidents play an bulk carrier over 10,000 dwt in 2018, important role in determining where additional INTERCARGO urges all stakeholders to remain safety improvement is necessary. The vigilant as cargo liquefaction continues to pose a importance of flag States’ timely submission of major threat to the life of seafarers. -

Abstract “Ship Conversion Feasibility Study of Oil
ABSTRACT “SHIP CONVERSION FEASIBILITY STUDY OF OIL TANKER MARLINA XV 29990 DWT INTO BULK CARRIER” Nama Penulis : Fadwi Mukti Wibowo NRP : 4106 100 002 Jurusan : Teknik Perkapalan ITS Dosen Pembimbing : Ir. Wasis Dwi Aryawan, M.Sc, Ph.D. In recent years especially in oil tanker ,conversion technology in ship is become popular, because it has lower cost and short time than making a new building ships. Many of tanker is being converted because it was too old and there is new regulation in MARPOL 73/78 about double hull and double bottom for oil tanker. In this final project will be discussed about conversion from oil tanker MARLINA XV (IMO Number 7925778) into bulk cargo ship carrying coal (bulk carrier) because requirement of the Papua Jayapura Power Plant 2 (2x10MW) needs low-calorie coal about 250,00 tons / year. For the technical analysis , the ship from the conversion project should be able to comply with some criteria such as: typical of cargo hold bulk carrier, freeboard minimum, longitudinal strength with BKI Rules, design has been verified with FEM Analysis CSR , and stability of the ship with IMO stability Criteria. For the economic analysis, it calculated for the cost that required to convert oil tanker ship to become bulk carrier ship. After the calculation is done, the result for the cargo hold capacity after conversion is 24,139 tonnes of low-calorie coal with density 1,346 tons/m3 and 10.252 for the draft of ship. For the result of maksimum stress in longitudinal strength is 1465.33 (Kg/cm2) and the stability of ship is comply with IMO stability Criteria. -

Tanker Technology: Limitations of Double Hulls
(A37851) TANKER US Coast Guard TECHNOLOGY : LIMITATIONS OF DOUBLE HULLS photo A Report by Living Oceans Society www.livingoceans.org photo: Natalia Bratslavsky limitations (A37851) o f d o u b l e - h u l l ta n k e r s Acknowledgements This report was made possible through the generous support of the Tar Sands Campaign Fund of Tides Foundation. Living Oceans Society would also like to thank Dave Shannon for his many valuable 2 contributions and insights into the writing of this report. Living Oceans Society Box 320 Sointula, BC V0N 3E0 Canada 250 973 6580 [email protected] www.livingoceans.org © 2011 Living Oceans Society Terhune, K. (2011). Tanker Technology: limitations of double hulls. A Report by Living Oceans Society. Sointula, BC: Living Oceans Society. (A37851) Contents Executive Summary . 4 Sole owner responsibility . 12 Introduction . 5 Corrosion . 12 Background . 6 Protective coatings . 14 Double hull design . 6 Fatigue cracks . 14 Regulation . 7 Inspection . 15 Oil Pollution Act of 1990 . 7 Human Factors . 16 International Convention for the Double-Hull Tanker Spills . 17 Prevention of Pollution from Ships . 7 Bunga Kelana 3 . 17 Oil Pollution Prevention Regulations . 7 Eagle Otome . 17 Limitations of Double Hulls . 8 Krymsk . 17 Design and construction issues . 8 Conclusion . 18 Lack of experience . 8 Glossary . 19 Factory techniques . 8 Bibliography . 21 Limited warranty . 8 Appendix A . 23 Weakened class rules . 9 Double-Hull, Double-Bottom and Use of high tensile steel . 10 Double-Sided Spills . 23 Operational issues . 10 Higher stress levels . 10 Cargo leaks . 10 Gas detection . 11 Intact stability . 12 Mud build-up .