Experimental Characterization of Autonomous Heat Engine Based On
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fuel Cells Versus Heat Engines: a Perspective of Thermodynamic and Production
Fuel Cells Versus Heat Engines: A Perspective of Thermodynamic and Production Efficiencies Introduction: Fuel Cells are being developed as a powering method which may be able to provide clean and efficient energy conversion from chemicals to work. An analysis of their real efficiencies and productivity vis. a vis. combustion engines is made in this report. The most common mode of transportation currently used is gasoline or diesel engine powered automobiles. These engines are broadly described as internal combustion engines, in that they develop mechanical work by the burning of fossil fuel derivatives and harnessing the resultant energy by allowing the hot combustion product gases to expand against a cylinder. This arrangement allows for the fuel heat release and the expansion work to be performed in the same location. This is in contrast to external combustion engines, in which the fuel heat release is performed separately from the gas expansion that allows for mechanical work generation (an example of such an engine is steam power, where fuel is used to heat a boiler, and the steam then drives a piston). The internal combustion engine has proven to be an affordable and effective means of generating mechanical work from a fuel. However, because the majority of these engines are powered by a hydrocarbon fossil fuel, there has been recent concern both about the continued availability of fossil fuels and the environmental effects caused by the combustion of these fuels. There has been much recent publicity regarding an alternate means of generating work; the hydrogen fuel cell. These fuel cells produce electric potential work through the electrochemical reaction of hydrogen and oxygen, with the reaction product being water. -

The Aircraft Propulsion the Aircraft Propulsion
THE AIRCRAFT PROPULSION Aircraft propulsion Contact: Ing. Miroslav Šplíchal, Ph.D. [email protected] Office: A1/0427 Aircraft propulsion Organization of the course Topics of the lectures: 1. History of AE, basic of thermodynamic of heat engines, 2-stroke and 4-stroke cycle 2. Basic parameters of piston engines, types of piston engines 3. Design of piston engines, crank mechanism, 4. Design of piston engines - auxiliary systems of piston engines, 5. Performance characteristics increase performance, propeller. 6. Turbine engines, introduction, input system, centrifugal compressor. 7. Turbine engines - axial compressor, combustion chamber. 8. Turbine engines – turbine, nozzles. 9. Turbine engines - increasing performance, construction of gas turbine engines, 10. Turbine engines - auxiliary systems, fuel-control system. 11. Turboprop engines, gearboxes, performance. 12. Maintenance of turbine engines 13. Ramjet engines and Rocket engines Aircraft propulsion Organization of the course Topics of the seminars: 1. Basic parameters of piston engine + presentation (1-7)- 3.10.2017 2. Parameters of centrifugal flow compressor + presentation(8-14) - 17.10.2017 3. Loading of turbine blade + presentation (15-21)- 31.10.2017 4. Jet engine cycle + presentation (22-28) - 14.11.2017 5. Presentation alternative date Seminar work: Aircraft engines presentation A short PowerPoint presentation, aprox. 10 minutes long. Content of presentation: - a brief history of the engine - the main innovation introduced by engine - engine drawing / cross-section - -
Carnot Cycles
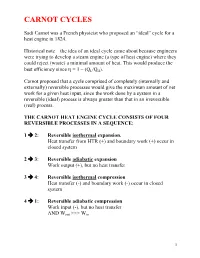
CARNOT CYCLES Sadi Carnot was a French physicist who proposed an “ideal” cycle for a heat engine in 1824. Historical note – the idea of an ideal cycle came about because engineers were trying to develop a steam engine (a type of heat engine) where they could reject (waste) a minimal amount of heat. This would produce the best efficiency since η = 1 – (QL/QH). Carnot proposed that a cycle comprised of completely (internally and externally) reversible processes would give the maximum amount of net work for a given heat input, since the work done by a system in a reversible (ideal) process is always greater than that in an irreversible (real) process. THE CARNOT HEAT ENGINE CYCLE CONSISTS OF FOUR REVERSIBLE PROCESSES IN A SEQUENCE: 1 Æ 2: Reversible isothermal expansion. Heat transfer from HTR (+) and boundary work (+) occur in closed system 2 Æ 3: Reversible adiabatic expansion Work output (+), but no heat transfer 3 Æ 4: Reversible isothermal compression Heat transfer (-) and boundary work (-) occur in closed system 4 Æ 1: Reversible adiabatic compression Work input (-), but no heat transfer AND Wout >>> Win 1 P-V DIAGRAM FOR CARNOT HEAT ENGINE CYCLE P 1 2 4 3 Showing net work is POSITIVE. V A useful example of an isothermal expansion is boiling (vaporization) at a constant pressure in a device such as a piston-cylinder. Similarly, an example of an isothermal compression is condensation at a constant pressure in a piston-cylinder. Also, heat transfer can only occur in processes 1 Æ 2 and 3 Æ4. 1 Æ 2: since work is positive (expansion) and Δu is positive (e.g., boiling) then heat transfer is positive (input from HTR). -

Lecture 10. Heat Engines (Ch. 4)
Lecture 11. Heat Engines (Ch. 4) A heat engine – any device that is capable of converting thermal energy (heating) into mechanical energy (work). We will consider an important class of such devices whose operation is cyclic. Heating – the transfer of energy to a system by thermal contact with a reservoir. Work – the transfer of energy to a system by a change in the external parameters (V, el.-mag. and grav. fields, etc.). The main question we want to address: what are the limitations imposed by thermodynamic on the performance of heat engines? Perpetual Motion Machines are Impossible Perpetual Motion Machines of the first type – these designs seek to violation of the First Law create the energy required for their (energy conservation) operation out of nothing. Perpetual Motion Machines of the second type - these designs extract the energy required for their operation violation of the Second in a manner that decreases the entropy Law of an isolated system. hot reservoir Word of caution: for non-cyclic processes, T H 100% of heat can be transformed into work without violating the Second Law. heat Example: an ideal gas expands isothermally work being in thermal contact with a hot reservoir. Since U = const at T = const, all heat has been transformed into work. impossible cyclic heat engine Fundamental Difference between Heating and Work - is the difference in the entropy transfer! Transferring purely mechanical energy to or from a system does not (necessarily) change its entropy: ΔS = 0 for reversible processes. For this reason, all forms of work are thermodynamically equivalent to each other - they are freely convertible into each other and, in particular, into mechanical work. -

Carnot Heat Engine Efficiency with a Paramagnetic Gas
Carnot heat engine efficiency with a paramagnetic gas Manuel Malaver1,2,3 1 Bijective Physics Institute, Bijective Physics Group, Idrija, Slovenia 2 Entro-π Fluid Research Group. 3 Maritime University of the Caribbean, Catia la Mar, Venezuela. *Corresponding author (Email: [email protected]) Abstract – Considering ideal paramagnetic medium, in this paper we deduced an expression for the thermal efficiency of Carnot heat engine with a paramagnetic gas as working substance. We found that the efficiency depends on the limits of maximum and minimal temperature imposed on the Carnot cycle, as in the ideal gas, photon gas and variable Chaplygin gas. Keywords – Carnot heat engine, ideal paramagnetic medium, thermal efficiency, paramagnetic gas. 1. Introduction The magnetism is a type of associated physical phenomena with the orbital and spin motions of electrons and the interaction of electrons with each other (Ahmed et al., 2019). The electric currents and the atomic magnetic moment of elementary particles generate magnetic fields that can act on other currents and magnetic materials. The most common effect occurs in ferromagnetic solids which is possible when atoms are rearrange in such a way that magnetic atomic moments can interact to align parallel to each other (Eisberg and Resnick, 1991; Chikazumi, 2009). In quantum mechanics, the ferromagnetism can be described as a parallel alignment of magnetic moments what depends of the interaction between neighbouring moments (Feynman et al., 1963). Although ferromagnetism is the cause of many frequently observed magnetism effects, not all materials respond equally to magnetic fields because the interaction between magnetic atomic moments is very weak while in other materials this interaction is stronger (Ahmed et al., 2019). -
Lecture 11 Second Law of Thermodynamics
LECTURE 11 SECOND LAW OF THERMODYNAMICS Lecture instructor: Kazumi Tolich Lecture 11 2 ¨ Reading chapter 18.5 to 18.10 ¤ The second law of thermodynamics ¤ Heat engines ¤ Refrigerators ¤ Air conditions ¤ Heat pumps ¤ Entropy Second law of thermodynamics 3 ¨ The second law of thermodynamics states: Thermal energy flows spontaneously from higher to lower temperature. Heat engines are always less than 100% efficient at using thermal energy to do work. The total entropy of all the participants in any physical process cannot decrease during that process. Heat engines 4 ¨ Heat engines depend on the spontaneous heat flow from hot to cold to do work. ¨ In each cycle, the hot reservoir supplies heat �" to the engine which does work �and exhausts heat �$ to the cold reservoir. � = �" − �$ ¨ The energy efficiency of a heat engine is given by � � = �" Carnot’s theorem and maximum efficiency 5 ¨ The maximum-efficiency heat engine is described in Carnot’s theorem: If an engine operating between two constant-temperature reservoirs is to have maximum efficiency, it must be an engine in which all processes are reversible. In addition, all reversible engines operating between the same two temperatures, �$ and �", have the same efficiency. ¨ This is an idealization; no real engine can be perfectly reversible. ¨ The maximum efficiency of a heat engine (Carnot engine) can be written as: �$ �*+, = 1 − �" Quiz: 1 6 ¨ Consider the heat engine at right. �. denotes the heat extracted from the hot reservoir, and �/ denotes the heat exhausted to the cold reservoir in one cycle. What is the work done by this engine in one cycle in Joules? Quiz: 11-1 answer 7 ¨ 4000 J ¨ � = �. -

Exergo-Sustainability Analysis and Ecological Function of a Simple Gas Turbine Aero-Engine
Journal of Thermal Engineering, Vol. 4, No. 4, Special Issue 8, pp. 2083-2095, June, 2018 Yildiz Technical University Press, Istanbul, Turkey EXERGO-SUSTAINABILITY ANALYSIS AND ECOLOGICAL FUNCTION OF A SIMPLE GAS TURBINE AERO-ENGINE Y. Şöhret1,* ABSTRACT Nowadays, many environmental issues are of concern as a result of conventional energy resources utilization in addition to a rise in energy costs dependent on the rapid consumption of resources. Therefore, sustainability is an important term for the utilization of energy resources. The aviation industry is known to be responsible for 3% of total CO2 emissions concerning global warming. This forces us to investigate the aviation industry, specifically gas turbine aero-engines. Gas turbine aero-engines, working according to the principles of thermodynamics, similar to other energy conversion and generation systems can be evaluated using the first and second laws of thermodynamics. Integrated employment of the first and second laws of thermodynamics, namely exergy analysis, is an effective method for performance evaluation. Additionally, exergo-sustainability also yields beneficial results. In the framework of the current paper, ecological function is defined for a simple gas turbine aero-engine, while exergo-sustainability assessment methodology is also explained. Exergy efficiency of the compressor, combustor, gas turbine and nozzle, as components of a gas turbine aero-engine, is found to be 91.58%, 57.41%, 97.96%, and 61.25%, respectively. On the other hand, the sustainability measures of the evaluated gas turbine aero-engine in order of exergy efficiency, waste exergy ratio, recoverable exergy rate, exergy destruction factor, environmental effect factor and sustainability index are calculated to be 0.28, 0.71, 0.00, 0.69, 2.45, and 0.40, respectively whereas the ecological function is found to be -8732.21 kW. -

7-122 a Solar Pond Power Plant Operates by Absorbing Heat from the Hot Region Near the Bottom, and Rejecting Waste Heat to the Cold Region Near the Top
7-49 7-122 A solar pond power plant operates by absorbing heat from the hot region near the bottom, and rejecting waste heat to the cold region near the top. The maximum thermal efficiency that the power plant can have is to be determined. Analysis The highest thermal efficiency a heat engine operating between two specified temperature limits can have is the Carnot efficiency, which is determined from TL 308 K 12.7% 80 C th,max th,C 1 1 0.127 or TH 353 K In reality, the temperature of the working fluid must be above 35 C HE in the condenser, and below 80 C in the boiler to allow for any W effective heat transfer. Therefore, the maximum efficiency of the actual heat engine will be lower than the value calculated above. 35 C 7-123 A Carnot heat engine cycle is executed in a closed system with a fixed mass of steam. The net work output of the cycle and the ratio of sink and source temperatures are given. The low temperature in the cycle is to be determined. Assumptions The engine is said to operate on the Carnot cycle, which is totally reversible. Analysis The thermal efficiency of the cycle is TL 1 th 1 1 0.5 Carnot HE TH 2 Also, W W 25kJ Q 50kJ th H QH th 0.5 QL QH W 50 25 25 kJ and 0.0103 kg QL 25 kJ q 2427.2 kJ/kg h H2O L m 0.0103 kg fg@TL since the enthalpy of vaporization hfg at a given T or P represents the amount of heat transfer as 1 kg of a substance is converted from saturated liquid to saturated vapor at that T or P. -

Carnot Cycle and Heat Engine Fundamentals and Applications • Michel Feidt Carnot Cycle and Heat Engine Fundamentals and Applications
Carnot and Cycle Heat Engine Fundamentals and Applications • Michel Feidt Carnot Cycle and Heat Engine Fundamentals and Applications Edited by Michel Feidt Printed Edition of the Special Issue Published in Entropy www.mdpi.com/journal/entropy Carnot Cycle and Heat Engine Fundamentals and Applications Carnot Cycle and Heat Engine Fundamentals and Applications Special Issue Editor Michel Feidt MDPI • Basel • Beijing • Wuhan • Barcelona • Belgrade • Manchester • Tokyo • Cluj • Tianjin Special Issue Editor Michel Feidt Universite´ de Lorraine France Editorial Office MDPI St. Alban-Anlage 66 4052 Basel, Switzerland This is a reprint of articles from the Special Issue published online in the open access journal Entropy (ISSN 1099-4300) (available at: https://www.mdpi.com/journal/entropy/special issues/ carnot cycle). For citation purposes, cite each article independently as indicated on the article page online and as indicated below: LastName, A.A.; LastName, B.B.; LastName, C.C. Article Title. Journal Name Year, Article Number, Page Range. ISBN 978-3-03928-845-8 (Pbk) ISBN 978-3-03928-846-5 (PDF) c 2020 by the authors. Articles in this book are Open Access and distributed under the Creative Commons Attribution (CC BY) license, which allows users to download, copy and build upon published articles, as long as the author and publisher are properly credited, which ensures maximum dissemination and a wider impact of our publications. The book as a whole is distributed by MDPI under the terms and conditions of the Creative Commons license CC BY-NC-ND. Contents About the Special Issue Editor ...................................... vii Michel Feidt Carnot Cycle and Heat Engine: Fundamentals and Applications Reprinted from: Entropy 2020, 22, 348, doi:10.3390/e2203034855 .................. -

1 V. the Second Law of Thermodynamics V. the Second
V. The Second Law of Thermodynamics E. The Carnot Cycle 1. The reversible heat engine (a piston cylinder device) that operates on a cycle between heat reservoirs at TH and TL, as shown below on a P-v diagram, is the Carnot cycle. 2. Because the cycle is reversible, the Carnot cycle, operating between TH and TL, is the most efficient cycle possible. We want to know how much heat, QL, must be rejected by the engine. 3. If the Carnot heat engine is operated in reverse, we call it a Carnot refrigeration cycle. P Qout QL 1 ηth =1 − =1 − QH Qin QH Wnet,out = shaded area Q41=0 2 TH = constant •1-2 rev., isothermal expansion •2-3 rev., adiabatic expansion 4 Q =0 23 •3-4 rev., isothermal compression QL 3 TL = constant •4-1 rev., adiabatic compression lesson 15 v V. The Second Law of Thermodynamics F. The Carnot Principles 1. “The efficiency of an irreversible heat engine is always less than the efficiency of a reversible one operating between the same two reservoirs.” (p. 302) 2. “The efficiencies of all reversible heat engines operating between the same two reservoirs are the same.” (p. 302) Both principles are based on the Kelvin-Plank and Clausius statements of the second law. From the second principle we conclude that the thermal efficiency is a function only of the temperatures of the reservoirs. QL ηth=−11f(T,T) =− H L (6-13) QH lesson 15 1 V. The Second Law of Thermodynamics 3. Proof of the Second Carnot Principle Suppose we have a “super engine” that is more efficient than a reversible engine. -

Low-Temperature-Differential) Heat Engine
energies Article Thermal-Flow Analysis of a Simple LTD (Low-Temperature-Differential) Heat Engine Yeongmin Kim 1, Wongee Chun 1 and Kuan Chen 2,* 1 Department of Nuclear and Energy Engineering, Jeju National University, Jeju 690-756, Korea; [email protected] (Y.K.); [email protected] (W.C.) 2 Department of Mechanical Engineering, University of Utah, Salt Lake City, UT 84112, USA * Correspondence: [email protected]; Tel.: +1-801-581-4150 Academic Editor: Susan Krumdieck Received: 15 February 2017; Accepted: 19 April 2017; Published: 21 April 2017 Abstract: A combined thermal and flow analysis was carried out to study the behavior and performance of a simple, commercial LTD (low-temperature-differential) heat engine. Laminar-flow solutions for annulus and channel flows were employed to estimate the viscous drags on the piston and the displacer, and the pressure difference across the displacer. Temperature correction factors were introduced in the thermal analysis to account for the departures from the ideal heat transfer processes. The flow analysis results indicate that the work required to overcome the viscous drags on engine moving parts is very small for engine speeds below 10 RPS (revolutions per second). The work required to move the displacer due to the pressure difference across the displacer is also one-to-two orders of magnitude smaller than the moving-boundary work of the piston for temperature differentials in the neighborhood of 20 ◦C and engine speeds below 10 RPS. A comparison with experimental data reveals large degradations from the ideal heat transfer processes inside the engine. Keywords: low-temperature-differential engine; Stirling cycle; thermal-flow analysis; waste heat 1. -

Download Full Text Article
INTERNATIONAL JOURNAL OF ENERGY AND ENVIRONMENT Volume 2, Issue 1, 2011 pp.85-98 Journal homepage: www.IJEE.IEEFoundation.org Finite time exergoeconomic performance optimization of a thermoacoustic heat engine Xuxian Kan1,2, Lingen Chen1, Fengrui Sun1, Feng Wu1,2 1 Postgraduate School, Naval University of Engineering, Wuhan 430033, P. R. China. 2 School of Science, Wuhan Institute of Technology, Wuhan 430073, P. R. China. Abstract Finite time exergoeconomic performance optimization of a generalized irreversible thermoacoustic heat engine with heat resistance, heat leakage, thermal relaxation, and internal dissipation is investigated in this paper. Both the real part and the imaginary part of the complex heat transfer exponent change the optimal profit rate versus efficiency relationship quantitatively. The operation of the generalized irreversible thermoacoustic engine is viewed as a production process with exergy as its output. The finite time exergoeconomic performance optimization of the generalized irreversible thermoacoustic engine is performed by taking profit rate as the objective. The analytical formulas about the profit rate and thermal efficiency of the thermoacoustic engine are derived. Furthermore, the comparative analysis of the influences of various factors on the relationship between optimal profit rate and the thermal efficiency of the generalized irreversible thermoacoustic engine is carried out by detailed numerical examples. The optimal zone on the performance of the thermoacoustic heat engine is obtained by numerical analysis. The results obtained herein may be useful for the selection of the operation parameters for real thermoacoustic heat engines. Copyright © 2011 International Energy and Environment Foundation - All rights reserved. Keywords: Thermoacoustic heat engine, Complex heat transfer exponent, Exergoeconomic performance, Optimization zone.