14. Caches & the Memory Hierarchy
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
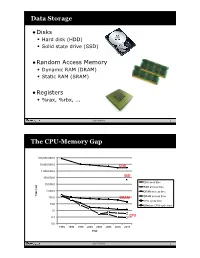
Data Storage the CPU-Memory
Data Storage •Disks • Hard disk (HDD) • Solid state drive (SSD) •Random Access Memory • Dynamic RAM (DRAM) • Static RAM (SRAM) •Registers • %rax, %rbx, ... Sean Barker 1 The CPU-Memory Gap 100,000,000.0 10,000,000.0 Disk 1,000,000.0 100,000.0 SSD Disk seek time 10,000.0 SSD access time 1,000.0 DRAM access time Time (ns) Time 100.0 DRAM SRAM access time CPU cycle time 10.0 Effective CPU cycle time 1.0 0.1 CPU 0.0 1985 1990 1995 2000 2003 2005 2010 2015 Year Sean Barker 2 Caching Smaller, faster, more expensive Cache 8 4 9 10 14 3 memory caches a subset of the blocks Data is copied in block-sized 10 4 transfer units Larger, slower, cheaper memory Memory 0 1 2 3 viewed as par@@oned into “blocks” 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 3 Cache Hit Request: 14 Cache 8 9 14 3 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 4 Cache Miss Request: 12 Cache 8 12 9 14 3 12 Request: 12 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 5 Locality ¢ Temporal locality: ¢ Spa0al locality: Sean Barker 6 Locality Example (1) sum = 0; for (i = 0; i < n; i++) sum += a[i]; return sum; Sean Barker 7 Locality Example (2) int sum_array_rows(int a[M][N]) { int i, j, sum = 0; for (i = 0; i < M; i++) for (j = 0; j < N; j++) sum += a[i][j]; return sum; } Sean Barker 8 Locality Example (3) int sum_array_cols(int a[M][N]) { int i, j, sum = 0; for (j = 0; j < N; j++) for (i = 0; i < M; i++) sum += a[i][j]; return sum; } Sean Barker 9 The Memory Hierarchy The Memory Hierarchy Smaller On 1 cycle to access CPU Chip Registers Faster Storage Costlier instrs can L1, L2 per byte directly Cache(s) ~10’s of cycles to access access (SRAM) Main memory ~100 cycles to access (DRAM) Larger Slower Flash SSD / Local network ~100 M cycles to access Cheaper Local secondary storage (disk) per byte slower Remote secondary storage than local (tapes, Web servers / Internet) disk to access Sean Barker 10. -
Managing the Memory Hierarchy
Managing the Memory Hierarchy Jeffrey S. Vetter Sparsh Mittal, Joel Denny, Seyong Lee Presented to SOS20 Asheville 24 Mar 2016 ORNL is managed by UT-Battelle for the US Department of Energy http://ft.ornl.gov [email protected] Exascale architecture targets circa 2009 2009 Exascale Challenges Workshop in San Diego Attendees envisioned two possible architectural swim lanes: 1. Homogeneous many-core thin-node system 2. Heterogeneous (accelerator + CPU) fat-node system System attributes 2009 “Pre-Exascale” “Exascale” System peak 2 PF 100-200 PF/s 1 Exaflop/s Power 6 MW 15 MW 20 MW System memory 0.3 PB 5 PB 32–64 PB Storage 15 PB 150 PB 500 PB Node performance 125 GF 0.5 TF 7 TF 1 TF 10 TF Node memory BW 25 GB/s 0.1 TB/s 1 TB/s 0.4 TB/s 4 TB/s Node concurrency 12 O(100) O(1,000) O(1,000) O(10,000) System size (nodes) 18,700 500,000 50,000 1,000,000 100,000 Node interconnect BW 1.5 GB/s 150 GB/s 1 TB/s 250 GB/s 2 TB/s IO Bandwidth 0.2 TB/s 10 TB/s 30-60 TB/s MTTI day O(1 day) O(0.1 day) 2 Memory Systems • Multimode memories – Fused, shared memory – Scratchpads – Write through, write back, etc – Virtual v. Physical, paging strategies – Consistency and coherence protocols • 2.5D, 3D Stacking • HMC, HBM/2/3, LPDDR4, GDDR5, WIDEIO2, etc https://www.micron.com/~/media/track-2-images/content-images/content_image_hmc.jpg?la=en • New devices (ReRAM, PCRAM, Xpoint) J.S. -
Embedded DRAM
Embedded DRAM Raviprasad Kuloor Semiconductor Research and Development Centre, Bangalore IBM Systems and Technology Group DRAM Topics Introduction to memory DRAM basics and bitcell array eDRAM operational details (case study) Noise concerns Wordline driver (WLDRV) and level translators (LT) Challenges in eDRAM Understanding Timing diagram – An example References Slide 1 Acknowledgement • John Barth, IBM SRDC for most of the slides content • Madabusi Govindarajan • Subramanian S. Iyer • Many Others Slide 2 Topics Introduction to memory DRAM basics and bitcell array eDRAM operational details (case study) Noise concerns Wordline driver (WLDRV) and level translators (LT) Challenges in eDRAM Understanding Timing diagram – An example Slide 3 Memory Classification revisited Slide 4 Motivation for a memory hierarchy – infinite memory Memory store Processor Infinitely fast Infinitely large Cycles per Instruction Number of processor clock cycles (CPI) = required per instruction CPI[ ∞ cache] Finite memory speed Memory store Processor Finite speed Infinite size CPI = CPI[∞ cache] + FCP Finite cache penalty Locality of reference – spatial and temporal Temporal If you access something now you’ll need it again soon e.g: Loops Spatial If you accessed something you’ll also need its neighbor e.g: Arrays Exploit this to divide memory into hierarchy Hit L2 L1 (Slow) Processor Miss (Fast) Hit Register Cache size impacts cycles-per-instruction Access rate reduces Slower memory is sufficient Cache size impacts cycles-per-instruction For a 5GHz -

Chapter 6 : Memory System
Computer Organization and Architecture Chapter 6 : Memory System Chapter – 6 Memory System 6.1 Microcomputer Memory Memory is an essential component of the microcomputer system. It stores binary instructions and datum for the microcomputer. The memory is the place where the computer holds current programs and data that are in use. None technology is optimal in satisfying the memory requirements for a computer system. Computer memory exhibits perhaps the widest range of type, technology, organization, performance and cost of any feature of a computer system. The memory unit that communicates directly with the CPU is called main memory. Devices that provide backup storage are called auxiliary memory or secondary memory. 6.2 Characteristics of memory systems The memory system can be characterised with their Location, Capacity, Unit of transfer, Access method, Performance, Physical type, Physical characteristics, Organisation. Location • Processor memory: The memory like registers is included within the processor and termed as processor memory. • Internal memory: It is often termed as main memory and resides within the CPU. • External memory: It consists of peripheral storage devices such as disk and magnetic tape that are accessible to processor via i/o controllers. Capacity • Word size: Capacity is expressed in terms of words or bytes. — The natural unit of organisation • Number of words: Common word lengths are 8, 16, 32 bits etc. — or Bytes Unit of Transfer • Internal: For internal memory, the unit of transfer is equal to the number of data lines into and out of the memory module. • External: For external memory, they are transferred in block which is larger than a word. -

The Memory Hierarchy
Chapter 6 The Memory Hierarchy To this point in our study of systems, we have relied on a simple model of a computer system as a CPU that executes instructions and a memory system that holds instructions and data for the CPU. In our simple model, the memory system is a linear array of bytes, and the CPU can access each memory location in a constant amount of time. While this is an effective model as far as it goes, it does not reflect the way that modern systems really work. In practice, a memory system is a hierarchy of storage devices with different capacities, costs, and access times. CPU registers hold the most frequently used data. Small, fast cache memories nearby the CPU act as staging areas for a subset of the data and instructions stored in the relatively slow main memory. The main memory stages data stored on large, slow disks, which in turn often serve as staging areas for data stored on the disks or tapes of other machines connected by networks. Memory hierarchies work because well-written programs tend to access the storage at any particular level more frequently than they access the storage at the next lower level. So the storage at the next level can be slower, and thus larger and cheaper per bit. The overall effect is a large pool of memory that costs as much as the cheap storage near the bottom of the hierarchy, but that serves data to programs at the rate of the fast storage near the top of the hierarchy. -
Lecture 10: Memory Hierarchy -- Memory Technology and Principal of Locality
Lecture 10: Memory Hierarchy -- Memory Technology and Principal of Locality CSCE 513 Computer Architecture Department of Computer Science and Engineering Yonghong Yan [email protected] https://passlab.github.io/CSCE513 1 Topics for Memory Hierarchy • Memory Technology and Principal of Locality – CAQA: 2.1, 2.2, B.1 – COD: 5.1, 5.2 • Cache Organization and Performance – CAQA: B.1, B.2 – COD: 5.2, 5.3 • Cache Optimization – 6 Basic Cache Optimization Techniques • CAQA: B.3 – 10 Advanced Optimization Techniques • CAQA: 2.3 • Virtual Memory and Virtual Machine – CAQA: B.4, 2.4; COD: 5.6, 5.7 – Skip for this course 2 The Big Picture: Where are We Now? Processor Input Control Memory Datapath Output • Memory system – Supplying data on time for computation (speed) – Large enough to hold everything needed (capacity) 3 Overview • Programmers want unlimited amounts of memory with low latency • Fast memory technology is more expensive per bit than slower memory • Solution: organize memory system into a hierarchy – Entire addressable memory space available in largest, slowest memory – Incrementally smaller and faster memories, each containing a subset of the memory below it, proceed in steps up toward the processor • Temporal and spatial locality insures that nearly all references can be found in smaller memories – Gives the allusion of a large, fast memory being presented to the processor 4 Memory Hierarchy Memory Hierarchy 5 Memory Technology • Random Access: access time is the same for all locations • DRAM: Dynamic Random Access Memory – High density, low power, cheap, slow – Dynamic: need to be “refreshed” regularly – 50ns – 70ns, $20 – $75 per GB • SRAM: Static Random Access Memory – Low density, high power, expensive, fast – Static: content will last “forever”(until lose power) – 0.5ns – 2.5ns, $2000 – $5000 per GB Ideal memory: • Magnetic disk • Access time of SRAM – 5ms – 20ms, $0.20 – $2 per GB • Capacity and cost/GB of disk 6 Static RAM (SRAM) 6-Transistor Cell – 1 Bit 6-Transistor SRAM Cell word word 0 1 (row select) 0 1 bit bit bit bit • Write: 1. -
Memory Systems
Memory Systems Patterson & Hennessey Chapter 5 1 Memory Hierarchy Primary Memory Secondary Secondary CPU Cache Main Memory Memory ---- Memory Memory (Disk) (Archival) Registers MC MM MD MA Memory Content: MC ⊆ MM ⊆ MD ⊆ MA Memory Parameters: Other Factors: •Access Time: increase with distance from CPU • Energy consumption •Cost/Bit: decrease with distance from CPU • Reliability •Capacity: increase with distance from CPU • Size/density 2 § 5.1 Introducion Memory Technology Static RAM (SRAM) 0.5ns – 2.5ns, $2000 – $5000 per GB Memory Hierarchy Dynamic RAM (DRAM) CPU 50ns – 70ns, $20 – $75 per GB Increasing distance Level 1 from the CPU in Magnetic disk access time Levels in the Level 2 5ms – 20ms, $0.20 – $2 per GB memory hierarchy Ideal memory Level n Access time of SRAM Capacity and cost/GB of disk Size of the memory at each level 3 Locality of Reference Programs access a small proportion of their address space at any time If an item is referenced: - temporal locality: it will tend to be referenced again soon - spatial locality: nearby items will tend to be referenced soon Why does code have locality? Our initial focus: two levels (upper, lower) block: minimum unit of data transferred hit: data requested is in the upper level miss: data requested is not in the upper level 4 Taking Advantage of Locality Memory hierarchy Store everything on disk Copy recently accessed (and nearby) items from disk to smaller DRAM memory Main memory Copy more recently accessed (and nearby) items from DRAM to smaller/faster SRAM memory -
Chapter 2: Memory Hierarchy Design
Computer Architecture A Quantitative Approach, Fifth Edition Chapter 2 Memory Hierarchy Design Copyright © 2012, Elsevier Inc. All rights reserved. 1 Contents 1. Memory hierarchy 1. Basic concepts 2. Design techniques 2. Caches 1. Types of caches: Fully associative, Direct mapped, Set associative 2. Ten optimization techniques 3. Main memory 1. Memory technology 2. Memory optimization 3. Power consumption 4. Memory hierarchy case studies: Opteron, Pentium, i7. 5. Virtual memory 6. Problem solving dcm 2 Introduction Introduction Programmers want very large memory with low latency Fast memory technology is more expensive per bit than slower memory Solution: organize memory system into a hierarchy Entire addressable memory space available in largest, slowest memory Incrementally smaller and faster memories, each containing a subset of the memory below it, proceed in steps up toward the processor Temporal and spatial locality insures that nearly all references can be found in smaller memories Gives the allusion of a large, fast memory being presented to the processor Copyright © 2012, Elsevier Inc. All rights reserved. 3 Memory hierarchy Processor L1 Cache L2 Cache L3 Cache Main Memory Latency Hard Drive or Flash Capacity (KB, MB, GB, TB) Copyright © 2012, Elsevier Inc. All rights reserved. 4 PROCESSOR L1: I-Cache D-Cache I-Cache instruction cache D-Cache data cache U-Cache unified cache L2: U-Cache Different functional units fetch information from I-cache and D-cache: decoder and L3: U-Cache scheduler operate with I- cache, but integer execution unit and floating-point unit Main: Main Memory communicate with D-cache. Copyright © 2012, Elsevier Inc. All rights reserved. -

A Novel Cache Architecture for Multicore Processor Using Vlsi Sujitha .S, Anitha .N
International Journal of Scientific & Engineering Research, Volume 4, Issue 6, June-2013 178 ISSN 2229-5518 A Novel Cache Architecture For Multicore Processor Using Vlsi Sujitha .S, Anitha .N Abstract— Memory cell design for cache memories is a major concern in current Microprocessors mainly due to its impact on energy consumption, area and access time. Cache memories dissipate an important amount of the energy budget in current microprocessors. An n-bit cache cell, namely macrocell, has been proposed. This cell combines SRAM and eDRAM technologies with the aim of reducing energy consumption while maintaining the performance. The proposed M-Cache is implemented in processor architecture and its performance is evaluated. The main objective of this project is to design a newly modified cache of Macrocell (4T cell). The speed of these cells is comparable to the speed of 6T SRAM cells. The performance of the processor architecture including this modified-cache is better than the conventional Macrocell cache design. Further this Modified Macrocell is implemented in Mobile processor architecture and compared with the conventional memory. Also a newly designed Femtocell is compared with both the macrocell and Modified m-cache cell. Index Terms— Femtocell. L1 cache, L2 cache, Macrocell, Modified M-cell, UART. —————————— —————————— 1 INTRODUCTION The cache operation is that when the CPU requests contents of memory location, it first checks cache for this data, if present, get from cache (fast), if not present, read PROCESSORS are generally able to perform operations required block from main memory to cache. Then, deliver from cache to CPU. Cache includes tags to identify which on operands faster than the access time of large capacity block of main memory is in each cache slot. -

Memory Hierarchy Summary
Carnegie Mellon Carnegie Mellon Today DRAM as building block for main memory The Memory Hierarchy Locality of reference Caching in the memory hierarchy Storage technologies and trends 15‐213 / 18‐213: Introduction to Computer Systems 10th Lecture, Feb 14, 2013 Instructors: Seth Copen Goldstein, Anthony Rowe, Greg Kesden 1 2 Carnegie Mellon Carnegie Mellon Byte‐Oriented Memory Organization Simple Memory Addressing Modes Normal (R) Mem[Reg[R]] • • • . Register R specifies memory address . Aha! Pointer dereferencing in C Programs refer to data by address movl (%ecx),%eax . Conceptually, envision it as a very large array of bytes . In reality, it’s not, but can think of it that way . An address is like an index into that array Displacement D(R) Mem[Reg[R]+D] . and, a pointer variable stores an address . Register R specifies start of memory region . Constant displacement D specifies offset Note: system provides private address spaces to each “process” . Think of a process as a program being executed movl 8(%ebp),%edx . So, a program can clobber its own data, but not that of others nd th From 2 lecture 3 From 5 lecture 4 Carnegie Mellon Carnegie Mellon Traditional Bus Structure Connecting Memory Read Transaction (1) CPU and Memory CPU places address A on the memory bus. A bus is a collection of parallel wires that carry address, data, and control signals. Buses are typically shared by multiple devices. Register file Load operation: movl A, %eax ALU %eax CPU chip Main memory Register file I/O bridge A 0 Bus interface ALU x A System bus Memory bus I/O Main Bus interface bridge memory 5 6 Carnegie Mellon Carnegie Mellon Memory Read Transaction (2) Memory Read Transaction (3) Main memory reads A from the memory bus, retrieves CPU read word xfrom the bus and copies it into register word x, and places it on the bus. -
![Problem 1 : Locality of Reference. [10 Points] Problem 2 : Virtual Memory](https://docslib.b-cdn.net/cover/5785/problem-1-locality-of-reference-10-points-problem-2-virtual-memory-2025785.webp)
Problem 1 : Locality of Reference. [10 Points] Problem 2 : Virtual Memory
CMU 18–746 Storage Systems Spring 2010 Solutions to Homework 0 Problem 1 : Locality of reference. [10 points] Spatial locality is the concept that objects logically “close” in location to an object in the cache are more likely to be accessed than objects logically “far.” For example, if disk block #3 is read and placed in the cache, it is more likely that disk block #4 will be referenced soon than block #31,415,926 because blocks #3 and #4 are close to each other on the disk. Temporal locality is the concept that items more recently accessed in the cache are more likely to be accessed than older, “stale” blocks. For example, if disk blocks are read and placed in the cache in the order #271, #828, #182, then it is more likely that disk block #182 will be referenced again soon than block #271. Another way of thinking of this is that a block is likely to be accessed multiple times in a short span of time. Problem 2 : Virtual memory. [20 points] (a) Swapping is the process of evicting a virtual memory page from physical memory (writing the contents of the page to a backing store [for example, a disk]) and replacing the freed memory with another page (either a newly created page, or an existing page read from the backing store). In essence, one virtual memory page is “swapped” with another. Swapping is initiated whenever all physical page frames are allocated and a virtual memory reference is made to a page that’s not in memory. -

Memory Hierarchy
Memory The Memory/Processor Performance Gap Memory-Processor Performance Gap The memory hierarchy CPU Increasing distance Level 1 from the CPU in access time Levels in the Level 2 memory hierarchy Level n Size of the memory at each level The memory hierarchy Fundamentals of Memory Hierarchy Locality Temporal locality The currently required data are likely to need again in the near future Spatial locality There is high probability that the other data nearby will be need soon Two Processor/Memory Architectures Processor Processor Princeton Fewer memory wires Harvard Program Data memory Memory Simultaneous memory (program and data) program and data memory access Harvard Princeton Memory Access Process Physical Address Virtual Tag address hit miss CPU Main TLB Cache Memory miss hit Address Translation data TLB (Translation lookaside buffer): Translate a virtual address to a physical address Memory management units Handles DRAM refresh, bus interface and arbitration Takes care of memory sharing among multiple processors Translates logic memory addresses from processor to physical memory addresses logical physical address memory address main CPU management memory unit Memory Data Organization Endianness Big Endian/Little Endian Memory data alignment Endianness The order of bytes (sometimes “bit”) in memory to represent different data types Little/Big Endian Little Endian: put the least-significant byte first (at lower address) e.g. Intel Processor Big Endian: put the most-significant byte first e.g.some PowerPCs, Motorola,