Slap: a Split Latency Adaptive Vliw Pipeline Architecture Which Enables On-The-Fly Variable Simd Vector-Length
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Embedded DRAM
Embedded DRAM Raviprasad Kuloor Semiconductor Research and Development Centre, Bangalore IBM Systems and Technology Group DRAM Topics Introduction to memory DRAM basics and bitcell array eDRAM operational details (case study) Noise concerns Wordline driver (WLDRV) and level translators (LT) Challenges in eDRAM Understanding Timing diagram – An example References Slide 1 Acknowledgement • John Barth, IBM SRDC for most of the slides content • Madabusi Govindarajan • Subramanian S. Iyer • Many Others Slide 2 Topics Introduction to memory DRAM basics and bitcell array eDRAM operational details (case study) Noise concerns Wordline driver (WLDRV) and level translators (LT) Challenges in eDRAM Understanding Timing diagram – An example Slide 3 Memory Classification revisited Slide 4 Motivation for a memory hierarchy – infinite memory Memory store Processor Infinitely fast Infinitely large Cycles per Instruction Number of processor clock cycles (CPI) = required per instruction CPI[ ∞ cache] Finite memory speed Memory store Processor Finite speed Infinite size CPI = CPI[∞ cache] + FCP Finite cache penalty Locality of reference – spatial and temporal Temporal If you access something now you’ll need it again soon e.g: Loops Spatial If you accessed something you’ll also need its neighbor e.g: Arrays Exploit this to divide memory into hierarchy Hit L2 L1 (Slow) Processor Miss (Fast) Hit Register Cache size impacts cycles-per-instruction Access rate reduces Slower memory is sufficient Cache size impacts cycles-per-instruction For a 5GHz -

Chapter 6 : Memory System
Computer Organization and Architecture Chapter 6 : Memory System Chapter – 6 Memory System 6.1 Microcomputer Memory Memory is an essential component of the microcomputer system. It stores binary instructions and datum for the microcomputer. The memory is the place where the computer holds current programs and data that are in use. None technology is optimal in satisfying the memory requirements for a computer system. Computer memory exhibits perhaps the widest range of type, technology, organization, performance and cost of any feature of a computer system. The memory unit that communicates directly with the CPU is called main memory. Devices that provide backup storage are called auxiliary memory or secondary memory. 6.2 Characteristics of memory systems The memory system can be characterised with their Location, Capacity, Unit of transfer, Access method, Performance, Physical type, Physical characteristics, Organisation. Location • Processor memory: The memory like registers is included within the processor and termed as processor memory. • Internal memory: It is often termed as main memory and resides within the CPU. • External memory: It consists of peripheral storage devices such as disk and magnetic tape that are accessible to processor via i/o controllers. Capacity • Word size: Capacity is expressed in terms of words or bytes. — The natural unit of organisation • Number of words: Common word lengths are 8, 16, 32 bits etc. — or Bytes Unit of Transfer • Internal: For internal memory, the unit of transfer is equal to the number of data lines into and out of the memory module. • External: For external memory, they are transferred in block which is larger than a word. -
Memory Systems
Memory Systems Patterson & Hennessey Chapter 5 1 Memory Hierarchy Primary Memory Secondary Secondary CPU Cache Main Memory Memory ---- Memory Memory (Disk) (Archival) Registers MC MM MD MA Memory Content: MC ⊆ MM ⊆ MD ⊆ MA Memory Parameters: Other Factors: •Access Time: increase with distance from CPU • Energy consumption •Cost/Bit: decrease with distance from CPU • Reliability •Capacity: increase with distance from CPU • Size/density 2 § 5.1 Introducion Memory Technology Static RAM (SRAM) 0.5ns – 2.5ns, $2000 – $5000 per GB Memory Hierarchy Dynamic RAM (DRAM) CPU 50ns – 70ns, $20 – $75 per GB Increasing distance Level 1 from the CPU in Magnetic disk access time Levels in the Level 2 5ms – 20ms, $0.20 – $2 per GB memory hierarchy Ideal memory Level n Access time of SRAM Capacity and cost/GB of disk Size of the memory at each level 3 Locality of Reference Programs access a small proportion of their address space at any time If an item is referenced: - temporal locality: it will tend to be referenced again soon - spatial locality: nearby items will tend to be referenced soon Why does code have locality? Our initial focus: two levels (upper, lower) block: minimum unit of data transferred hit: data requested is in the upper level miss: data requested is not in the upper level 4 Taking Advantage of Locality Memory hierarchy Store everything on disk Copy recently accessed (and nearby) items from disk to smaller DRAM memory Main memory Copy more recently accessed (and nearby) items from DRAM to smaller/faster SRAM memory -

A Novel Cache Architecture for Multicore Processor Using Vlsi Sujitha .S, Anitha .N
International Journal of Scientific & Engineering Research, Volume 4, Issue 6, June-2013 178 ISSN 2229-5518 A Novel Cache Architecture For Multicore Processor Using Vlsi Sujitha .S, Anitha .N Abstract— Memory cell design for cache memories is a major concern in current Microprocessors mainly due to its impact on energy consumption, area and access time. Cache memories dissipate an important amount of the energy budget in current microprocessors. An n-bit cache cell, namely macrocell, has been proposed. This cell combines SRAM and eDRAM technologies with the aim of reducing energy consumption while maintaining the performance. The proposed M-Cache is implemented in processor architecture and its performance is evaluated. The main objective of this project is to design a newly modified cache of Macrocell (4T cell). The speed of these cells is comparable to the speed of 6T SRAM cells. The performance of the processor architecture including this modified-cache is better than the conventional Macrocell cache design. Further this Modified Macrocell is implemented in Mobile processor architecture and compared with the conventional memory. Also a newly designed Femtocell is compared with both the macrocell and Modified m-cache cell. Index Terms— Femtocell. L1 cache, L2 cache, Macrocell, Modified M-cell, UART. —————————— —————————— 1 INTRODUCTION The cache operation is that when the CPU requests contents of memory location, it first checks cache for this data, if present, get from cache (fast), if not present, read PROCESSORS are generally able to perform operations required block from main memory to cache. Then, deliver from cache to CPU. Cache includes tags to identify which on operands faster than the access time of large capacity block of main memory is in each cache slot. -

Memory Hierarchy Summary
Carnegie Mellon Carnegie Mellon Today DRAM as building block for main memory The Memory Hierarchy Locality of reference Caching in the memory hierarchy Storage technologies and trends 15‐213 / 18‐213: Introduction to Computer Systems 10th Lecture, Feb 14, 2013 Instructors: Seth Copen Goldstein, Anthony Rowe, Greg Kesden 1 2 Carnegie Mellon Carnegie Mellon Byte‐Oriented Memory Organization Simple Memory Addressing Modes Normal (R) Mem[Reg[R]] • • • . Register R specifies memory address . Aha! Pointer dereferencing in C Programs refer to data by address movl (%ecx),%eax . Conceptually, envision it as a very large array of bytes . In reality, it’s not, but can think of it that way . An address is like an index into that array Displacement D(R) Mem[Reg[R]+D] . and, a pointer variable stores an address . Register R specifies start of memory region . Constant displacement D specifies offset Note: system provides private address spaces to each “process” . Think of a process as a program being executed movl 8(%ebp),%edx . So, a program can clobber its own data, but not that of others nd th From 2 lecture 3 From 5 lecture 4 Carnegie Mellon Carnegie Mellon Traditional Bus Structure Connecting Memory Read Transaction (1) CPU and Memory CPU places address A on the memory bus. A bus is a collection of parallel wires that carry address, data, and control signals. Buses are typically shared by multiple devices. Register file Load operation: movl A, %eax ALU %eax CPU chip Main memory Register file I/O bridge A 0 Bus interface ALU x A System bus Memory bus I/O Main Bus interface bridge memory 5 6 Carnegie Mellon Carnegie Mellon Memory Read Transaction (2) Memory Read Transaction (3) Main memory reads A from the memory bus, retrieves CPU read word xfrom the bus and copies it into register word x, and places it on the bus. -
![Problem 1 : Locality of Reference. [10 Points] Problem 2 : Virtual Memory](https://docslib.b-cdn.net/cover/5785/problem-1-locality-of-reference-10-points-problem-2-virtual-memory-2025785.webp)
Problem 1 : Locality of Reference. [10 Points] Problem 2 : Virtual Memory
CMU 18–746 Storage Systems Spring 2010 Solutions to Homework 0 Problem 1 : Locality of reference. [10 points] Spatial locality is the concept that objects logically “close” in location to an object in the cache are more likely to be accessed than objects logically “far.” For example, if disk block #3 is read and placed in the cache, it is more likely that disk block #4 will be referenced soon than block #31,415,926 because blocks #3 and #4 are close to each other on the disk. Temporal locality is the concept that items more recently accessed in the cache are more likely to be accessed than older, “stale” blocks. For example, if disk blocks are read and placed in the cache in the order #271, #828, #182, then it is more likely that disk block #182 will be referenced again soon than block #271. Another way of thinking of this is that a block is likely to be accessed multiple times in a short span of time. Problem 2 : Virtual memory. [20 points] (a) Swapping is the process of evicting a virtual memory page from physical memory (writing the contents of the page to a backing store [for example, a disk]) and replacing the freed memory with another page (either a newly created page, or an existing page read from the backing store). In essence, one virtual memory page is “swapped” with another. Swapping is initiated whenever all physical page frames are allocated and a virtual memory reference is made to a page that’s not in memory. -

Week 6: Assignment Solutions
Week 6: Assignment Solutions 1. Which of the following is true for a memory hierarchy? a. It tries to bridge the processor-memory speed gap. b. The speed of the memory level closest to the processor has the highest speed. c. The capacity of the memory level farthest away from the processor is the largest. d. It is based on the principle of locality of reference. All the answers are true. This follows from the basic definition of memory hierarchy design. The fastest and smallest memory module is closest to the processor. The overall access time of the memory system is close to the access time of the fastest memory level. This is achieved by exploiting locality of reference. 2. Which of the following statements are false? a. Temporal locality arises because of loops in a program. b. Spatial locality arises because of loops in a program. c. Temporal locality arises because of sequential instruction execution. d. Spatial locality arises because of sequential instruction execution. Correct answers are (b) and (c). Temporal locality says that an accessed word will be accessed again in the near future, and this is due to the presence of loops. Spatial locality says that if a work is accessed, then words in the neighborhood will also be accessed in the near future. This happens due to sequential program execution. 3. Assume that a read request takes 50 nsec on a cache miss and 5 nsec on a cache hit. While running a program, it is observed that 80% of the processor’s read requests result in a cache hit. -
The Memory System
The Memory System Fundamental Concepts Some basic concepts Maximum size of the Main Memory byte-addressable CPU-Main Memory Connection Memory Processor k-bit address bus MAR n-bit data bus Up to 2k addressable MDR locations Word length = n bits Control lines ( R / W , MFC, etc.) Some basic concepts(Contd.,) Measures for the speed of a memory: . memory access time. memory cycle time. An important design issue is to provide a computer system with as large and fast a memory as possible, within a given cost target. Several techniques to increase the effective size and speed of the memory: . Cache memory (to increase the effective speed). Virtual memory (to increase the effective size). The Memory System Semiconductor RAM memories Internal organization of memory chips Each memory cell can hold one bit of information. Memory cells are organized in the form of an array. One row is one memory word. All cells of a row are connected to a common line, known as the “word line”. Word line is connected to the address decoder. Sense/write circuits are connected to the data input/output lines of the memory chip. Internal organization of memory chips (Contd.,) 7 7 1 1 0 0 W0 • • • FF FF A 0 W • • 1 • A 1 Address • • • • • • Memory decoder cells A • • • • • • 2 • • • • • • A 3 W • • 15 • Sense / Write Sense / Write Sense / Write R / W circuit circuit circuit CS Data input /output lines: b7 b1 b0 SRAM Cell Two transistor inverters are cross connected to implement a basic flip-flop. The cell is connected to one word line and two bits lines by transistors T1 and T2 When word line is at ground level, the transistors are turned off and the latch retains its state Read operation: In order to read state of SRAM cell, the word line is activated to close switches T1 and T2. -
14. Caches & the Memory Hierarchy
14. Caches & The Memory Hierarchy 6.004x Computation Structures Part 2 – Computer Architecture Copyright © 2016 MIT EECS 6.004 Computation Structures L14: Caches & The Memory Hierarchy, Slide #1 Memory Our “Computing Machine” ILL XAdr OP JT 4 3 2 1 0 PCSEL Reset RESET 1 0 We need to fetch one instruction each cycle PC 00 A Instruction Memory +4 D ID[31:0] Ra: ID[20:16] Rb: ID[15:11] Rc: ID[25:21] 0 1 RA2SEL + WASEL Ultimately RA1 RA2 XP 1 Register WD Rc: ID[25:21] WAWA data is 0 File RD1 RD2 WE WE R F Z JT loaded C: SXT(ID[15:0]) (PC+4)+4*SXT(C) from and IRQ Z ID[31:26] ASEL 1 0 1 0 BSEL results Control Logic stored to ALUFN ASEL memory BSEL A B MOE WD WE MWR ALUFN ALU MWR Data MOE OE PCSEL Memory RA2SEL Adr RD WASEL WDSEL WERF PC+4 0 1 2 WD S E L 6.004 Computation Structures L14: Caches & The Memory Hierarchy, Slide #2 Memory Technologies Technologies have vastly different tradeoffs between capacity, access latency, bandwidth, energy, and cost – … and logically, different applications Capacity Latency Cost/GB Processor Register 1000s of bits 20 ps $$$$ Datapath SRAM ~10 KB-10 MB 1-10 ns ~$1000 Memory DRAM ~10 GB 80 ns ~$10 Hierarchy Flash* ~100 GB 100 us ~$1 I/O Hard disk* ~1 TB 10 ms ~$0.10 subsystem * non-volatile (retains contents when powered off) 6.004 Computation Structures L14: Caches & The Memory Hierarchy, Slide #3 Static RAM (SRAM) Data in Drivers 6 SRAM cell Wordlines Address (horizontal) 3 Bitlines (vertical, two per cell) Address decoder 8x6 SRAM Sense array amplifiers 6 6.004 Computation Structures Data out L14: Caches & The Memory Hierarchy, Slide #4 SRAM Cell 6-MOSFET (6T) cell: – Two CMOS inverters (4 MOSFETs) forming a bistable element – Two access transistors Bistable element bitline bitline (two stable states) stores a single bit 6T SRAM Cell Vdd GND “1” GND Vdd “0” Wordline N access FETs 6.004 Computation Structures L14: Caches & The Memory Hierarchy, Slide #5 SRAM Read 1 1. -

Unstructured Computations on Emerging Architectures
Unstructured Computations on Emerging Architectures Dissertation by Mohammed A. Al Farhan In Partial Fulfillment of the Requirements For the Degree of Doctor of Philosophy King Abdullah University of Science and Technology Thuwal, Kingdom of Saudi Arabia May 2019 2 EXAMINATION COMMITTEE PAGE The dissertation of M. A. Al Farhan is approved by the examination committee Dissertation Committee: David E. Keyes, Chair Professor, King Abdullah University of Science and Technology Edmond Chow Associate Professor, Georgia Institute of Technology Mikhail Moshkov Professor, King Abdullah University of Science and Technology Markus Hadwiger Associate Professor, King Abdullah University of Science and Technology Hakan Bagci Associate Professor, King Abdullah University of Science and Technology 3 ©May 2019 Mohammed A. Al Farhan All Rights Reserved 4 ABSTRACT Unstructured Computations on Emerging Architectures Mohammed A. Al Farhan his dissertation describes detailed performance engineering and optimization Tof an unstructured computational aerodynamics software system with irregu- lar memory accesses on various multi- and many-core emerging high performance computing scalable architectures, which are expected to be the building blocks of energy-austere exascale systems, and on which algorithmic- and architecture-oriented optimizations are essential for achieving worthy performance. We investigate several state-of-the-practice shared-memory optimization techniques applied to key kernels for the important problem class of unstructured meshes. We illustrate -
The Automatic Improvement of Locality in Storage Systems
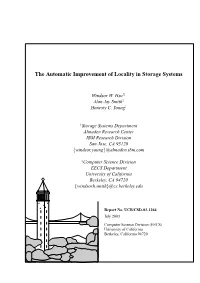
The Automatic Improvement of Locality in Storage Systems Windsor W. Hsuyz Alan Jay Smithz Honesty C. Youngy yStorage Systems Department Almaden Research Center IBM Research Division San Jose, CA 95120 fwindsor,[email protected] zComputer Science Division EECS Department University of California Berkeley, CA 94720 fwindsorh,[email protected] Report No. UCB/CSD-03-1264 July 2003 Computer Science Division (EECS) University of California Berkeley, California 94720 The Automatic Improvement of Locality in Storage Systems Windsor W. Hsuyz Alan Jay Smithz Honesty C. Youngy yStorage Systems Department zComputer Science Division Almaden Research Center EECS Department IBM Research Division University of California San Jose, CA 95120 Berkeley, CA 94720 fwindsor,[email protected] fwindsorh,[email protected] Abstract 80 Random I/O (4KB Blocks) ) s Sequential I/O Disk I/O is increasingly the performance bottleneck in r u o 60 H computer systems despite rapidly increasing disk data ( k s transfer rates. In this paper, we propose Automatic i D e r Locality-Improving Storage (ALIS), an introspective i t n 40 E storage system that automatically reorganizes selected d a disk blocks based on the dynamic reference stream to e R o t increase effective storage performance. ALIS is based e 20 m on the observations that sequential data fetch is far more i T efficient than random access, that improving seek dis- tances produces only marginal performance improve- 0 ments, and that the increasingly powerful processors and 1991 1995 1999 2003 large memories in storage systems have ample capacity Year Disk was Introduced to reorganize the data layout and redirect the accesses so as to take advantage of rapid sequential data trans- Figure 1: Time Needed to Read an Entire Disk as a fer. -

Chapter 4 - Cache Memory
Chapter 4 - Cache Memory Reading: Section 4.1 Computer Memory System Overview (pp. 101-108) We have already had brief discussions of memory, in particular, we have discussed memory in terms of location. This is one of the most important aspects of memory as the location has a direct impact on speed and expense. Before discussing the memory hierarchy in more detail, let's discuss some terminology. With memory, one of our biggest distinctions is "how is memory accessed" 1. Sequential Access - access through memory proceeds linearly. Typically, data is stored in records and some R/W mechanism is used to move linearly through the data until the desired record is found. (e.g. Tape Drive) 2. Direct Access - Using the same shared R/W mechanism individual records have a unique address and access is accomplished by going to a specific vicinity and then sequentially searching or counting until the final location is reached (e.g. Disk Drive) 1 3. Random - Each location has a unique address with a physically wired addressing scheme. Access time is constant. (e.g. MEM) 4. Associative - Is random access in nature where certain bits within a word are check and the appropriate location is computed. The word is retrieved from the location based on the bits and several words might be stored at the same location although only one at a time. Retrieval time is constant because accessing memory is still based on the random accessing scheme. From a users point of view in regard to memory, we are concerned about cost, capacity, and performance.