Remote Controlled Autonomous Floor Cleaning Robot
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Mop Bucket Vs Micromatic
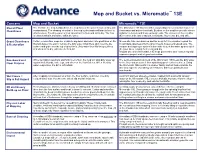
™ Mop and Bucket vs. Micromatic 13E Concern Mop and Bucket Micromatic™ 13E Overall Floor The first time the mop is dipped into the mop bucket, the water becomes dirty and The Micromatic 13E floor scrubber always dispenses a solution mixture of Cleanliness contaminated. The cleaning chemical in the mop bucket water will start to lose its clean water and active chemicals. Brushes on the scrubber provide intense effectiveness. The dirty water is then spread on the floor and left to dry. The floor agitation to loosen and break up tough soils. The vacuum on the scrubber is left wet with dirt and grime still in the water. then removes the water and dirt, leaving the floor clean, dry, and safe. Grout Cleanliness Cotton or microfiber mops are unable to dig down and reach into grout lines on tile Micromatic 13E uses brushes and the weight of the machine to push the & Restoration floors to loosen the soil or remove the dirty water. Mop fibers skim over the tile brush bristle tips deep into the grout lines to loosen embedded soils. The surface and glide over the top of grout lines. Dirty water then fills the grout lines vacuum and squeegee system is then able to suck the water up and out of and when left to dry, will leave behind dirt. the grout lines, leaving them clean and dry. Regular use of the Micromatic 13E helps prevent the time consuming and expensive project work of grout restoration. Baseboard and While swinging mops back and forth over a floor, the mop will sling dirty water up The semi-enclosed scrub deck of the Micromatic 13E keeps the dirty water Floor Fixtures against baseboards, table legs, and other on the floor fixtures. -

Floor Cleaning Manual
FLOOR CLEANING MANUAL TILED AREAS AQUATIC CENTRES ENVIROFLUID ENVIRONMENTAL FLUID SYSTEMS GPO Box PO1080, BOX Melbourne 1280 VIC 3001 Warrnambool1800 777 580Vic 3280 [email protected] 777 580 www.efsgroup.com.au [email protected] www.envirofluid.com Environmental FluidEnvirofluid Systems 2 Aquatic Centre Floor Cleaning with ActiveEco System Restoring Tiled Areas in Aquatic Centres Equipment required: 1. ActiveEco Restore 2. ActiveEco Rejuvenate 3. ActiveEco Floor Pad 4. Blue floor cleaning pad 5. Variable speed floor scrubber 6. Measuring Jugs 7. Mop and Bucket 8. Suction system eg. Wet Vac or Autoscrubber 9. Hose Deep clean Step 1 (acid step) Equipment: Rotary Scrubber + Blue FM pad Mop bucket, Measuring Jugs Chemical: ActiveEco Restore Method: 1. Prepare area by removing any loose soiling. Only clean an area of a size which can be managed within 30 – 40 minutes. About 50 m2. 2. Prepare a 1:5 Solution of ActiveEco Restore in mop bucket (8 litres water + 2 litres ActiveEco Restore). Apply this solution to the floor area with a mop. Ensure that the entire area is thoroughly wetted. 3. Do not scrub. Allow 15 minutes dwell time. Ensure that the floor does not dry out during this time. 4. Scrub the area using the rotary scrubber fitted with a blue FM pad. Use the slower speed setting if available (aprox 150rpm) 5. Extract the resultant slurry using an autoscrubber, wet vacuum or if possible hose down drain. 6. Thoroughly rinse the area with clean water before proceeding to Step 2. Note: Where deep grout lines and sloping flooring exists, the technician must ensure that the floor area stays wet with solution during the dwell time and when scrubbing. -

Lead Exposure Control
OSHA standard (29 CFR 1926.62) for lead exposure Notes Lead Exposure Control Preparation 1. Read Applicable Background information and related Company Policy Chapter. 2. Make _____ Copies of this Lesson Plan for Personnel 3. Make Transparency, procure transparency pens, etc. 4. Coffee, tea, snacks Material 1. Personal Protective Equipment the emloyee is expected to wear (see page 11) 2. Blasting Equipment the emloyee is expected to use Objective By the end of this session, personnel shall be able to discuss: 1. and Define “Engineering Controls” 2. and give examples of the following Engineering Controls: · Substitution · Isolation · Ventilation 3. Work Practice Controls to include: · Housekeeping · Personal Hygiene Practices · Washing and Eating Facilities 4. The Importance of Periodic Inspection and Maintenance 5. Employee Training Requirements 6. Lead Removal Operation Procedures Background Until the Company performs an employee-exposure assessment and determines the magnitude of the exposures actually occurring during the lead-related activity, the Company must assume that employees performing that task are exposed lead concentrations and the Company is required to provide respiratory protection appropriate to the task's presumed exposure level, protective work clothing and equipment, change areas, hand-washing facilities, training, and the initial medical surveillance prescribed by the OSHA Standard. Lesson Notes Engineering Controls Engineering controls, such as ventilation, and good work practices are the preferred methods of minimizing exposures to airborne lead at the worksite. The engineering control methods that can be used to reduce or eliminate lead exposures can be grouped into three main categories: (1) substitution, (2) isolation, and (3) ventilation. Engineering controls are the first line of defense in protecting workers from hazardous exposures. -

Professional Tools & Accessories
Professional Tools & Accessories Automotive | Commercial | Residential Paint Protection | Wraps | Vinyl & Graphics CONTENTS KNIVES & BLADES INSTALLATION ACCESSORIES 1 20 SCRAPERS & BLADES MEASURE/MARK & TRIM 4 22 HANDLED SQUEEGEES SPRAYERS & ACCESSORIES 6 23 SQUEEGEE ESSENTIALS CLEANING/PREP & CHEMICALS 11 24 PPF/WRAPS/VINYL & GRAPHICS SLITTERS & ACCESSORIES 14 26 HARD CARDS METERS 17 27 TUBE SQUEEGEES 18 KNIVES & BLADES STANDARD 9MM KNIVES GT126 OLFA “SILVER” SS KNIFE GT027 NT PRO A1 “RED DOT” KNIFE GT226 OLFA “SILVER 2” KNIFE The original Olfa stainless steel knife. Regarded by many installers as the Significantly improved over the original KNIVES & BLADES finest professional knife available. “Olfa Silver”. Features right or left The blade can be advanced in 1/2 handuse, blade position auto-lock, segment increments for precision and one-segment click-action. control. Right or left hand use. Now includes a stainless steel blade. GT127 OLFA A1 KNIFE GT227 OLFA XA1 ERGONOMIC KNIFE GT1018 NT A250RP AUTO-LOCK KNIFE Used for film pattern cutting and This ergonomically correct knife Chemical-resistant and heat-resistant trimming. Features a molded plastic features a comfortable rubber grip for polypropylene grip. Ratchet auto- handle for maximum control and better control and less fatigue. lock slider locks blade in place while comfort. Right or left hand use. cutting. Right or left hand use. GT1054 NT A300GR KNIFE GT124 PLASTIC UTILITY KNIFE All-purpose standard duty utility knife Used for film pattern cutting and with stainless steel sliding holder and trimming. sturdy aluminum die cast grip for long lasting use. Ratchet auto-lock slider locks blade in place while cutting. End cap also functions as a blade snapper. -

The Power of Prep Surface
22 D+D DECEMBER 2014 Q+ Got a concrete problem? Concrete A Ask the experts: [email protected]. By Fred Goodwin, FICRI, FACI, BASF Construction Chemicals he success or failure of any concrete coating or repair application is likely to be determined before the first drop of product ever touches the The Power of Prep surface. Surface preparation of con- Proper surface preparation on concrete means T crete is probably the most important consideration for successful coating and the difference between coating success and failure. repair material application. The Society for Protective Coatings’ ations. However, SSPC SP-13 states “An ac- scarifying, flame blasting, shotblasting, and standard SSPC SP-13/NACE No. 6 Surface ceptable prepared concrete surface should the use of surface retarders. ICRI 310.2 Preparation of Concrete defines surface be free of contaminants, laitance, loosely ad- Selecting and Specifying Concrete Surface preparation as: “The method or combina- hering concrete, and dust, and should pro- Preparation for Sealers, Coatings, Polymer tion of methods used to clean a concrete vide a sound, uniform substrate suitable for Overlays, and Concrete Repair discusses surface, remove loose and weak materials the application of protective coating or lining each method. and contaminants, repair the surface, and systems.” Whatever the method, the goal is an roughen the surface to promote adhesion.” Common concrete surface preparation acceptably prepared concrete surface. Let’s methods include abrasive blasting, acid take -

T380AMR Deployment Process and Training Report
Tennant Deployment and Training Checklist Tennant Autonomous T380AMR 1. Client/site name and store number: Click or tap here to enter text. 2. Dates of installation and training: Click or tap to enter a date. 3. Site location: Click or tap here to enter text. 4. Point of contact email and phone (Store Manager, 3rd shift Asst. Mgr., Maintenance Supervisor): Receive Weekly Name Title Email Phone Summary Y/N 5. Tennant Deployment Team: Click or tap here to enter text. Click or tap here to enter text. 6. Machine Serial Number: Click or tap here to enter text. Unpacking -Confirm shipment of scrubber, off-board charger, and packet of home markers. Verify storage location -Verify charging and storage location has adequate ventilation and power outlet -Confirm or determine permanent home location(s) with site supervisors 1 Rev. 8/2020 ©2020 The Tennant Company. All rights reserved. Robot Operator Training Process This document outlines the proper deployment and training for each operator of a T380AMR scrubber. A Tennant trainer will instruct trainers and operators regarding the subject matter of each point below. After completing each of the listed points, the manager/supervisor will check off the box, confirming that the operator has received that instruction. The operator will then review the document in its entirety and only sign after confirming its truth and accuracy. The Tennant trainer will then sign confirming the completion of the form as described. Installation, setup, and inspection of machine components -Attach squeegees, pads or brushes, add water for ec-H20 Nanoclean or cleaning solution -Inspect hoses for blockages -Test connectivity (ROC Icon is illuminated) -Test small section of floor space in manual mode -Go over site preparation techniques to perform prior to scrubbing (pre-sweep, check for obstacles) 7. -

Model: MC32036QP MC32036CE 320 Floor Scrubber Traction Driven
320 Model: MC32036QP Floor Scrubber MC32036CE Traction Driven OPERATION SERVICE PARTS CARE Revised 9/05 TABLE OF CONTENTS Page Safety Instructions 1 Electrical Requirements 2 Control Panel Identification 3 Squeegee Adjustments 4 Operating Instructions 5 Maintenance of Machine 6 & 7 Main Polyethylene Components 8 & 9 Recovery Tank 10 Solution Tank 11 Drive Assemblies 12 &13 Main Frame 14 & 15 Console Assembly 16 & 17 Scrubhead Assembly 18 Squeegee Mechanism Assembly 19 Squeegee Assembly Complete 20 Wiring Diagram Standard Model 21 Wiring Diagram CE Model 22 IMPORTANT SAFETY INSTRUCTIONS CAUTION Operators must read and understand this manual before operating or maintaining this equipment. • Keep hands and feet clear of moving parts while machine is in operation. • All switches must be in the “OFF” position when charging batteries. • Electrical motors and components can cause an explosion when operated near explosive materials or vapors. Do not operate this machine near flammable materials such as solvents, thinners, fuels, grain dusts, etc. • Make sure all switches are turned “OFF” and battery connections are removed before performing any maintenance procedures. • Store or park this machine on a level surface only. • These machines are designed for level floor operation only. DO NOT OPERATE on ramps or inclines. • Battery acid can cause burns. When working on or around batteries, wear protective clothing and safety glasses. Remove metal jewelry. Do not lay tools or metal objects on top of batteries. • This machine is not suitable for picking up hazardous dust. • Charging batteries generates explosive gases. DO NOT CHARGE BATTERIES WHEN OPEN FLAMES OR SPARKS ARE PRESENT. DO NOT SMOKE. Make sure the charger is turned off before disconnecting it from the batteries. -

Floor Scrubber Maintenance Chart
SCRUBBER MAINTENANCE TIPS Important: Before doing any maintenance on the scrubber, be sure the power is turned OFF or the batteries are disconnected. Daily Weekly 1. Raise the squeegee assembly off the floor and 1. Check fluid level in batteries. wipe the blades down with a damp towel. 2. Check batteries for loose or corroded cables. Be sure to store squeegee in the UP position. 3. Keep battery tops clean from corrosion. 2. Tilt machine back (after squeegee is UP), then remove and clean the pad driver(s)/brush(es). 3. Drain both recovery and solution tanks Monthly completely of water and solution. 1. Check the scrubber for leaks and tighten any 4. Rinse out recovery tank with clean water, and loose fasteners. remove any debris from inside tank. Remove 2. Lubricate all grease points and pivot points clear lid off the tank and remove drain hose with silicon spray or approved grease. cap to allow tank and hose to dry/breathe. 3. Place machine over a floor drain. Flush the 5. Remove the float shut-off filter inside the solution system by pouring 3 gallons of hot recovery tank and rinse it with clean water. water and approved alkaline detergent into 6. Clean the machine with an approved cleaner the solution tank and running the machine and a damp towel. (with solution control on) for 45 seconds. 7. Recharge the batteries. Turn machine off and let it sit overnight. The next day, drain the remaining solution and Daily Storage rinse the solution tank out with clean water. ALWAYS... DRAIN both tanks, store machine INDOORS, in a DRY area, in the UPRIGHT position, with the SQUEEGEE UP off the floor, and the PAD DRIVER/BRUSH UP off the floor. -

Product Catalog
Building Service Contractor Cleanroom Quality • Innovation • Service • Selection • Value Product Catalog Healthcare Education Foodservice GPS158 From the President Dear Geerpres Customers, If you’ve spent any time in the jan/san industry, we trust you’ve heard about and used Geerpres products. Since 1935, our company has earned a reputation for creating the highest quality, long- lasting metal wringers, buckets and housekeeping carts in the industry—essentially the foundation of any cleaning operation. Our products are an industry standard and have been the most reliable, standing the test of time for over 80 years. I purchased Geerpres in late 2013 because of the product quality, tremendous brand awareness, valued customer base, and the excellent opportunity to inject innovation into the product line and manufacturing processes. I saw great potential for what the company could be with new design and efficiency-focused products while continuing the tradition of superb customer service. In a little more than one year, I am proud to say we have done all of that and more, and for us, this is simply the genesis in a continuous improvement process. I want you to experience the “new Geerpres!” starting with our campaign theme: “Get Geared Up With Geerpres.” I can assure you everyone at our Muskegon, Michigan, headquarters is positively geared up and we hope you will join us in this re- introduction. As you review our new catalog, we hope you find our new products both innovative and exciting. We encourage you to check out our new website at www.Geerpres.com to learn more about who we are today and all we have to offer. -
Niebling Cleaning-Brushes-Systems Web.Pdf
KATALOG 2.6 EN C A T A L O G U E HACCP Applications Cleaning Brushes +Systems Wet cleaning Dry cleaning Shadowboard 5S MEETS HACCP, IFS AND FDA niebling.com TABLE OF CONTENTS CLEANING BRUSHES AND SYSTEMS Page 3 Scrubbers and brooms for handles Page 4 Floor scrapers, wet cleaning tools and tube brushes for handles Page 10 Mop systems Page 16 Squeeges and pullers for handles Page 19 Six-safe-handles and spare parts for handles Page 22 Resin programme Page 25 niebling Technische Bürsten GmbH Hand brushes and handle brushes Page 27 Alkali resistant brushes Page 32 Heat resistant brushes up to 200 °C / 250 °C Page 34 Sealing jaws and wire brushes Page 35 Hand brushes and food brushes Page 38 Glassware brushes Page 42 Tube brushes Page 44 Scrapers, spatulas, hammers and pads Page 47 Shovels and buckets Page 51 Holder and storage systems Page 56 Spray guns, hoses, accessories and cleaning cloths Page 58 Technical brushes A-Line – Antibacterial pens Page 62 TECHNICAL BRUSHES (Examples) Page 60 The catalogue „Technical Brushes“ gives an overview of Niebling‘s large technical brushes range. TRADITIONAL BRUSH PROGRAM Order now! Barrel and tank brushes, barrel and tank scrubbers Page 62 Phone +49 (0) 9843 9894-0 Scrubbers and wire scrubbers, hand, wire and handle brushes Page 63 [email protected] Handle brushes Page 64 Pipeline, filter frame brushes and sponge rubber balls Page 66 Pipeline, hose and nozzle brushes Page 67 Hole, cup and handle brushes Page 68 Laboratory and bottle brushes Page 69 Imhoff funnel, glass and jug brushes Page 70 Scrubbers, brooms and hand brooms, brooms and handles Page 71 car wash brushes Page 72 MACHINE BRUSHES Labelling and other machine brushes Page 73 TECHNOLOGY Technical information on hygiene regulations Page 74 Bristle materials Page 74 Maintenance and storage of working equipment Page 75 NEWS & NEW PRODUCTS: Material science to traditional brushes program Page 75 Our program is constantly being expanded. -

Beesupplies2017.Pdf
Hive Bodies and Components Item Price 5 frame wooden nuc box $37.50 assembled nuc $37.50 Plastic Nuc Box $10.95 9-5/8'' unassembled ponderosa pine hive body $15.00 6-5/8'' unassembled pine super $11.50 5-3/4'' unassembled pine super $10.50 9-5/8'' unassembled cypress hive body $22.00 6-5/8'' unassembled cypress super $17.00 5-3/4'' unassembled cypress super $14.75 9-5/8'' assembled & painted pine hive body $26.50 6-5/8'' assembled & painted pine super $22.50 5-3/4'' assembled & painted pine super $21.50 hive stand cypress (8 & 10 frame) $19.75 cypress screened bottom board (8 & 10 frame) $25.00 cypress solid reversible bottom board (8 & 10 frame) $19.75 Unassembled cypress telescoping cover $23.00 assembled cypress telescoping cover (8 & 10 frame) $28.50 assembled painted pine telescoping cover $26.75 assembled unpainted pine telescoping cover $24.50 cypress inner cover (8 or 10 frame) $14.00 migratory flat cover $13.50 Painted Migratory Cover $15.00 Nails for Hives $3.50 25 hive staples $2.00 plastic bound queen excluder $4.85 metal bound queen excluder (8 or 10 frame) $8.25 entrance reducer (8 or 10 frame) $1.50 propolis trap $8.50 bottom pollen trap $63.40 Hive bodies and Components cont. cypress double screen $19.00 cypress top moving screen $11.00 plastic 9 frame spacer $13.95 8 frame spacer for 10 frame equipment $0.60 9 frame spacer for 10 frame equipment $0.60 deep drone frames $2.75 medium drone frames $2.75 10 frame starter kit $189.50 Observation Hive (bees not included) $899.00 Observation Hive with Bees $1,099.00 Frame Assembly -
T7AMR Operator Manual
T7AMR (Battery) Rider-Scrubber Operator Manual Hygenic Fully® Cleanable Tanks ® TennantTrue Parts R North America / International For the latest Parts Manuals and other 9018134 language Operator Manuals, visit: Rev. 00 (10-2018) www.tennantco.com/manuals *9018134* INTRODUCTION This manual is furnished with each new model. It provides necessary operation and maintenance instructions. Read this manual completely and understand the machine before operating or servicing it. This machine will provide excellent service. However, the best results will be obtained at minimum costs if: • The machine is operated with reasonable care. • The machine is maintained regularly - per the machine maintenance instructions provided. • The machine is maintained with manufacturer supplied or equivalent parts. To view, print or download manuals online visit www.tennantco.com/manuals PROTECT THE ENVIRONMENT Please dispose of packaging materials, used components such as batteries and fluids in an environmentally safe way according to local waste disposal regulations. Always remember to recycle. MACHINE DATA Please fill out at time of installation for future reference. Model No. ï Serial No. ï Installation Date ï Tennant Company PO Box 1452 Minneapolis, MN 55440 Phone: (800) 553-8033 www.tennantco.com 1−Step. Duramer, and Insta-Fit are US registered and unregistered trademarks of Tennant Company BrainOS® is a US registered trademark of Brain Corp. Trojan® and HydroLINIK® are registered trademarks of Trojan Battery Company. Specifi cations and parts are subject to change without notice. Original Instructions, copyright© 2018 TENNANT Company, Printed in U.S.A INTRODUCTION This operator manual contains information to allow for quick start−up of the new Tennant T7AMR Scrubber, powered by BrainOS.