Systems-Theoretic Process Analysis of Space Launch Vehicles ⁎ John M
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Call for M5 Missions
ESA UNCLASSIFIED - For Official Use M5 Call - Technical Annex Prepared by SCI-F Reference ESA-SCI-F-ESTEC-TN-2016-002 Issue 1 Revision 0 Date of Issue 25/04/2016 Status Issued Document Type Distribution ESA UNCLASSIFIED - For Official Use Table of contents: 1 Introduction .......................................................................................................................... 3 1.1 Scope of document ................................................................................................................................................................ 3 1.2 Reference documents .......................................................................................................................................................... 3 1.3 List of acronyms ..................................................................................................................................................................... 3 2 General Guidelines ................................................................................................................ 6 3 Analysis of some potential mission profiles ........................................................................... 7 3.1 Introduction ............................................................................................................................................................................. 7 3.2 Current European launchers ........................................................................................................................................... -

Cape Canaveral Air Force Station Support to Commercial Space Launch
The Space Congress® Proceedings 2019 (46th) Light the Fire Jun 4th, 3:30 PM Cape Canaveral Air Force Station Support to Commercial Space Launch Thomas Ste. Marie Vice Commander, 45th Space Wing Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Ste. Marie, Thomas, "Cape Canaveral Air Force Station Support to Commercial Space Launch" (2019). The Space Congress® Proceedings. 31. https://commons.erau.edu/space-congress-proceedings/proceedings-2019-46th/presentations/31 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. Cape Canaveral Air Force Station Support to Commercial Space Launch Colonel Thomas Ste. Marie Vice Commander, 45th Space Wing CCAFS Launch Customers: 2013 Complex 41: ULA Atlas V (CST-100) Complex 40: SpaceX Falcon 9 Complex 37: ULA Delta IV; Delta IV Heavy Complex 46: Space Florida, Navy* Skid Strip: NGIS Pegasus Atlantic Ocean: Navy Trident II* Black text – current programs; Blue text – in work; * – sub-orbital CCAFS Launch Customers: 2013 Complex 39B: NASA SLS Complex 41: ULA Atlas V (CST-100) Complex 40: SpaceX Falcon 9 Complex 37: ULA Delta IV; Delta IV Heavy NASA Space Launch System Launch Complex 39B February 4, 2013 Complex 46: Space Florida, Navy* Skid Strip: NGIS Pegasus Atlantic Ocean: Navy Trident II* Black text – current programs; -

Space) Barriers for 50 Years: the Past, Present, and Future of the Dod Space Test Program
SSC17-X-02 Breaking (Space) Barriers for 50 Years: The Past, Present, and Future of the DoD Space Test Program Barbara Manganis Braun, Sam Myers Sims, James McLeroy The Aerospace Corporation 2155 Louisiana Blvd NE, Suite 5000, Albuquerque, NM 87110-5425; 505-846-8413 [email protected] Colonel Ben Brining USAF SMC/ADS 3548 Aberdeen Ave SE, Kirtland AFB NM 87117-5776; 505-846-8812 [email protected] ABSTRACT 2017 marks the 50th anniversary of the Department of Defense Space Test Program’s (STP) first launch. STP’s predecessor, the Space Experiments Support Program (SESP), launched its first mission in June of 1967; it used a Thor Burner II to launch an Army and a Navy satellite carrying geodesy and aurora experiments. The SESP was renamed to the Space Test Program in July 1971, and has flown over 568 experiments on over 251 missions to date. Today the STP is managed under the Air Force’s Space and Missile Systems Center (SMC) Advanced Systems and Development Directorate (SMC/AD), and continues to provide access to space for DoD-sponsored research and development missions. It relies heavily on small satellites, small launch vehicles, and innovative approaches to space access to perform its mission. INTRODUCTION Today STP continues to provide access to space for DoD-sponsored research and development missions, Since space first became a viable theater of operations relying heavily on small satellites, small launch for the Department of Defense (DoD), space technologies have developed at a rapid rate. Yet while vehicles, and innovative approaches to space access. -

FY2009 NRO Congressional Budget Justification Book
NATIONAL RECONNAISSANCE OFFICE 14675 Lee Road Chantilly, VA 20151-1715 6 July 2009 Mr. Steven Aftergood Senior Research Analyst Federation of American Scientists 1725 DeSales St NW, 6th Floor Washington, D.C. 20036 Dear Mr. Aftergood: This is in response to your faxed letter, dated 5 March 2008, received in the Information Management Services Center of the National Reconnaissance Office (NRO) on 7 March 2008. Pursuant to the Freedom of Information Act (FOIA), you requested "a copy of all unclassified portions of the NRO Congressional Budget Justification Book (CBJB) for Fiscal Year 2009.° Your request was processed in accordance with the Freedom of Information Act, 5 U.S.C. § 552, as amended. A thorough search of our files and databases located one record, consisting of 465 pages that is responsive to your request. This record is being released to you in part. Material withheld is denied pursuant to FOIA exemption(b) (3) which applies to information specifically exempt by statute, 50 U.S.C. § 403-1(i) which protects intelligence sources and methods from unauthorized disclosure. AS you are aware, the FOIA authorizes federal agencies to assess fees for record services. Based upon the information provided, you have been placed in the "other" category of requesters, which means that a requester is responsible for charges incurred for the cost of search time exceeding two hours and duplication in excess of the first 100 pages of document reproduction in the processing of this request. In your request, you expressed a willingness to pay fees up to the amount of $50.00. -

The Strutjet Rocket Based Combined Cycle Engine A. Siebenhaar And
J The Strutjet Rocket Based Combined Cycle Engine A. Siebenhaar and M.J. Bulman GenCorp Aerojet Sacramento, CA And D.K. Bonnar Boeing Company Huntington Beach, Ca TABLE OF CONTENTS 1C) In_.roduc_o;', 2 0 Struuet t n_ine 2.1 FIo_ Path Description 2.2 Engine Architecture 2.2.1 FIo_path Elements 2.2.2 Turbo Machine D . Propellant Supply & Thermal Management 2.2.3 Engine C)cle 2.2.4 Structural Concept 2.3 Strutjet Operating Modes 2.3.1 Ducted Rocket Mode 2.3.2 Ramjet Mode 2.3.3 Scramjet Mode 2.3.4 Scram Rocket and Ascent Rocket Modes 2.4 Optimal Propulsion System Selection 2.4.1 Boost Mode Selection 2.4.2 Engine Design Point Selection 2.4.3 Ascent Rocket Transition Point Selection 3.0 Strutjet Vehicle Inte_ation 3.1 Strutjet Reference Mission 3.2 Engine-Vehicle Considerations 33 Vehicle Pitching Moment 3.4 Engine Performance 3.5 Reduced Operating Cost Through Robustness 3.6 Vehicle Comparisons 4.0 Available Hydrocarbon'and Hydrogen Test Data and plan_d Future Test Activities 4.1 Storable Hydrocarbon System Tests 4.2 CD'ogenic H.xdrogen System Tests 4.3 Planned Flight Tests 5.0 Maturit2. Of Required Su'utjet Technologies 6.0 Summar) and Conclusions 7.0 References J List of Tables 1. Comparison of Rocket and Strut.let Turbopumps 2. Sensitixitx to Engine Robustness 3. Vehicle Design Features and System Robustness 4. All-Rocket Vehicle Mass Breakdown 5. Strutjet Vehicle Mass Breakdown 6. Design Parameters for the All-Rocket and the RBCC-SSTO Vehicle 7. -

Jaxa Today 10.Pdf
Japan Aerospace Exploration Agency April 2016 No. 10 Special Features Japan’s Technical Prowess Technical excellence and team spirit are manifested in such activities as the space station capture of the HTV5 spacecraft, development of the H3 Launch Vehicle, and reduction of sonic boom in supersonic transport International Cooperation JAXA plays a central role in international society and contributes through diverse joint programs, including planetary exploration, and the utilization of Earth observation satellites in the environmental and disaster management fields Contents No. 10 Japan Aerospace Exploration Agency Special Feature 1: Japan’s Technical Prowess 1−3 Welcome to JAXA TODAY Activities of “Team Japan” Connecting the Earth and Space The Japan Aerospace Exploration Agency (JAXA) is positioned as We review some of the activities of “Team the pivotal organization supporting the Japanese government’s Japan,” including the successful capture of H-II Transfer Vehicle 5 (HTV5), which brought overall space development and utilization program with world- together JAXA, NASA and the International Space Station (ISS). leading technology. JAXA undertakes a full spectrum of activities, from basic research through development and utilization. 4–7 In 2013, to coincide with the 10th anniversary of its estab- 2020: The H3 Launch Vehicle Vision JAXA is currently pursuing the development lishment, JAXA defined its management philosophy as “utilizing of the H3 Launch Vehicle, which is expected space and the sky to achieve a safe and affluent society” and to become the backbone of Japan’s space development program and build strong adopted the new corporate slogan “Explore to Realize.” Under- international competitiveness. We examine the H3’s unique features and the development program’s pinned by this philosophy, JAXA pursues a broad range of pro- objectives. -

Three Events Occurred During This Period Which Together Constitute a Major Milestone in the Way Meteorological Data Are Pr
6.1 DESIGNING WEATHER SUPPORT FOR FUTURE RANGES – RESULTS FROM THE ADVANCED RANGE TECHNOLOGY WORKING GROUP WEATHER SUBGROUP William P. Roeder1 and John T. Madura2 145th Weather Squadron, Patrick Air Force Base, FL 2Weather Office, Kennedy Space Center, FL 1. INTRODUCTION 2. ARTWG WEATHER TECHNOLOGY ROADMAP The Advanced Range Technology Working Group The ARTWG Weather Subgroup, which included (ARTWG) was formed to identify the technologies government, industry and university participants, prepared required for the best performing, most cost-effective future a technology roadmap summarizing desired major space launch and test Ranges, and the R&D required to capabilities for optimal meteorological support to space achieve those technologies. The ARTWG resulted from a ranges for 25 years into the future. The 25-year planning White House Office of Science and Technology Policy time was further divided into three sub-periods (Table-2). (2000) report on the future of America’s space program. The near term requirements can be met with technology The White House tasked NASA and the U.S. Air Force to that is currently available and implementation can begin cooperatively identify the R&D requirements necessary to immediately. The mid term requirements are those that ensure the future competitiveness of U.S. ranges. Two will likely be available in 5-10 years or will require a small parallel initiatives resulted, the ARTWG (2004) co-chaired amount of development. The far term requirements are by NASA and the Air Force, and the companion Advanced advanced capabilities that will require considerable time Spaceport Technology Working Group (ASTWG) (2003), for research and development. -

The Insurance Institute of London
The Insurance Institute of London CII CPD accredited - demonstrates the quality of an event and that it meets CII/PFS member CPD scheme requirements. This webinar will count as 1 hour of CPD and can be included as part of your CPD requirement should you consider it relevant to your professional development needs. It is recommended that you keep any evidence of the CPD activity you have completed and upload copies to the recording tool as the CII may ask to see this if your record is selected for review. MHI Launch Services - key essence of MHI’s quality management - Ref. B01038001405 February 17, 2021 © MITSUBISHI HEAVY INDUSTRIES, LTD. All Rights Reserved. MHI PROPRIETARY INFORMATION MHI PROPRIETARY INFORMATION 1. Introduction of MHI & Insurance Activities for our products 2. Launch Services 2.1 current work force H-IIA/B 2.2 Next gen, flagship H3 - Under Development - 3. MHI Quality Management Overview 4. Overcoming anomalies 4.1 Launch Operation case, H-IIB F8 4.2 Development case, H3 main engine(LE-9) 5. Conclusion © MITSUBISHI HEAVY INDUSTRIES, LTD. All Rights Reserved. PROPRIETARY INFORMATION 3 1. Introduction of MHI & Insurance Activities for our products MHI PROPRIETARY Introduction of MHI INFORMATION Power Systems Foundation July 7, 1884 Capital (USD) 2,415 MUSD As of Mar. 2019 Employees Thermal Power Plant Compressor CO2 Recovery Plants Desalination Plant (consolidated) 80,744 As of Mar. 2019 Industry & Infrastructure Sales (consolidated) 38,055 MUSD As of Mar. 2020 EBITDA 115.1 Dubai Metro Intelligent Transport Systems Overseas offices 7 Aircraft, Defense & Space Currency rate: USD 1 = JPY 110 Boeing – 787 Space Jet Defense Aircraft Launch Vehicle (Composite main wings) (H-IIA/-IIB) © MITSUBISHI HEAVY INDUSTRIES, LTD. -
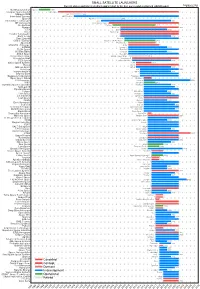
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT -

Corporate Profile
2013 : Epsilon Launch Vehicle 2009 : International Space Station 1997 : M-V Launch Vehicle 1955 : The First Launched Pencil Rocket Corporate Profile Looking Ahead to Future Progress IHI Aerospace (IA) is carrying out the development, manufacture, and sales of rocket projectiles, and has been contributing in a big way to the indigenous space development in Japan. We started research on rocket projectiles in 1953. Now we have become a leading comprehensive manufacturer carrying out development and manufacture of rocket projectiles in Japan, and are active in a large number of fields such as rockets for scientific observation, rockets for launching practical satellites, and defense-related systems, etc. In the space science field, we cooperate with the Japan Aerospace Exploration Agency (JAXA) to develop and manufacture various types of observational rockets named K (Kappa), L (Lambda), and S (Sounding), and the M (Mu) rockets. With the M rockets, we have contributed to the launch of many scientific satellites. In 2013, efforts resulted in the successful launch of an Epsilon Rocket prototype, a next-generation solid rocket which inherited the 2 technologies of all the aforementioned rockets. In the practical satellite booster rocket field, We cooperates with the JAXA and has responsibilities in the solid propellant field including rocket boosters, upper-stage motors in development of the N, H-I, H-II, and H-IIA H-IIB rockets. We have also achieved excellent results in development of rockets for material experiments and recovery systems, as well as the development of equipment for use in a space environment or experimentation. In the defense field, we have developed and manufactured a variety of rocket systems and rocket motors for guided missiles, playing an important role in Japanese defense. -

Federal Register/Vol. 84, No. 72/Monday, April 15, 2019
15296 Federal Register / Vol. 84, No. 72 / Monday, April 15, 2019 / Proposed Rules DEPARTMENT OF TRANSPORTATION Docket: Background documents or FSS—Flight safety system comments received may be read at PC—Probability of casualty Federal Aviation Administration http://www.regulations.gov at any time. PI—Probability of impact Follow the online instructions for RLV—Reusable launch vehicle 14 CFR Parts 401, 404, 413, 414, 415, accessing the docket or go to the Docket Table of Contents 417, 420, 431, 433, 435, 437, 440, and Operations in Room W12–140 of the 450 I. Overview of Proposed Rule West Building Ground Floor at 1200 II. Background [Docket No.: FAA–2019–0229; Notice No. New Jersey Avenue SE, Washington, A. History 19–01] DC, between 9 a.m. and 5 p.m., Monday B. Licensing Process through Friday, except Federal holidays. C. National Space Council RIN 2120–AL17 FOR FURTHER INFORMATION CONTACT: For D. Streamlined Launch and Reentry Licensing Requirements Aviation Streamlined Launch and Reentry questions concerning this action, contact Randy Repcheck, Office of Rulemaking Committee Licensing Requirements III. Discussion of the Proposal Commercial Space Transportation, A. The FAA’s Approach To Updating and AGENCY: Federal Aviation Federal Aviation Administration, 800 Streamlining Launch and Reentry Administration (FAA), Department of Independence Avenue SW, Washington, Regulations Transportation (DOT). DC 205914; telephone (202) 267–8760; B. Single Vehicle Operator License ACTION: Notice of proposed rulemaking email [email protected]. C. Performance-Based Requirements and (NPRM). SUPPLEMENTARY INFORMATION: Means of Compliance D. Launch From a Federal Launch Range SUMMARY: This rulemaking would Authority for This Rulemaking E. -

Space Coast Is Getting Busy: 6 New Rockets Coming to Cape Canaveral, KSC
4/16/2019 Space Coast is getting busy: 6 new rockets coming to Cape Canaveral, KSC Space Coast is getting busy: 6 new rockets coming to Cape Canaveral, Kennedy Space Center Emre Kelly, Florida Today Published 4:04 p.m. ET April 11, 2019 | Updated 7:53 a.m. ET April 12, 2019 COLORADO SPRINGS, Colo. – If schedules hold, the Space Coast will live up to its name over the next two years as a half-dozen new rockets target launches from sites peppered across the Eastern Range. Company, government and military officials here at the 35th Space Symposium, an annual space conference, have reaffirmed their plans to launch rockets ranging from more traditional heavy-lift behemoths to smaller vehicles that take advantage of new manufacturing technologies. Even if some of these schedules slip, at least one thing is apparent to several spaceflight experts here: The Eastern Range is seeing an unprecedented growth in commercial space companies and efforts. Space Launch System: 2020 NASA's Space Launch System rocket launches from Kennedy Space Center's pad 39B in this rendering by the agency. (Photo: NASA) NASA's long-awaited SLS, a multibillion-dollar rocket announced in 2011, is slated to become the most powerful launch vehicle in history if it can meet a stringent late 2020 deadline. The 322-foot-tall rocket is expected to launch on its first flight – Exploration Mission 1 – from Kennedy Space Center with an uncrewed Orion capsule for a mission around the moon, which fits in with the agency's wider goal of putting humans on the surface by 2024.